How Robots Can Recognize Activities and Plans Using Topic Models
advertisement

AI and Robotics: Papers from the AAAI-14 Workshop
How Robots Can Recognize Activities and Plans Using Topic Models
Richard G. Freedman, Hee-Tae Jung, Roderic A. Grupen, and Shlomo Zilberstein
School of Computer Science
University of Massachusetts
Amherst, MA 01003, USA
{freedman, hjung, grupen, shlomo}@cs.umass.edu
Abstract
omits such structural relationships. A bag-of-words representation can loosely be related to a partially-ordered plan
with no global ordering constraints. Local sequential ordering constraints can be clustered into a single word. This
is similar to the way computer vision uses bag-of-words
models with patches of pixels as a single word unit (Wang
et al. 2006). Due to the combinatorial nature of representing all ordered sequences of partially-ordered plans,
identifying them using rigidly structured recognition models
such as HTNs, plan grammars (Geib and Steedman 2007),
and hierarchical hidden Markov models (Fine et al. 1998;
Bui et al. 2004) can be difficult. This means that many PR
techniques are not easily able to recognize a large subset of
plans, particularly those without a strong action ordering.
A now common method for studying the distributions of
topics in bag-of-words models for text is Latent Dirichlet
Allocation (LDA) (Blei et al. 2003). The topics used in
LDA are themselves distributions over the vocabulary (set of
words) pertaining to relevancy of concepts. Thus we examine ways to treat plans analogously – like bags-of-words –
and analyze their distributions of topics using LDA. We hypothesize that, when the correct number of topics is selected,
each topic will contain higher likelihoods of observed poses
for a specific activity. The learned topics may additionally
be used for activity recognition (AR), and we will focus on
this aspect for the majority of the paper.
Wang and Mori (2009) performed a similar study using
a variant of LDA with topic-annotated video data to perform AR. Their Semilatent Dirichlet Allocation model is
a supervised method that predefines the topics and labels
the image frames prior to learning. However, LDA itself
is unsupervised and pixel-based representations can be vulnerable to confusion between postures as well as have difficulty accounting for scaling. Zhang and Parker (2011)
also performed a similar study using LDA without modifications and a RGB-D sensor mounted on an actual robot.
Their representation of the sensor input consists of identifying local spatio-temporal features and compacting them to
vectors of four-dimensional cuboids. While this avoids the
raster-image issues, they assign all the features to one of 600
discrete groups which is rather small (see Section 3). We
instead consider pose information through human postural
data obtained from a RGB-D sensor in order to avoid these
representational drawbacks.
The ability to identify what humans are doing in the environment is a crucial element of responsive behavior in humanrobot interaction. We examine new ways to perform plan
recognition (PR) using natural language processing (NLP)
techniques. PR often focuses on the structural relationships
between consecutive observations and ordered activities that
comprise plans. However, NLP commonly treats text as a
bag-of-words, omitting such structural relationships and using topic models to break down the distribution of concepts
discussed in documents. In this paper, we examine an analogous treatment of plans as distributions of activities. We
explore the application of Latent Dirichlet Allocation topic
models to plan execution traces obtained from human postural data read by a RGB-D sensor. This investigation focuses
on representing the data as text and interpreting learned activities as a form of activity recognition (AR). Additionally,
we explain how the system may perform PR. The initial empirical results suggest that such NLP methods can be useful
in complex PR and AR tasks.
1
Introduction
This paper presents an example in which techniques originally developed for natural language processing (NLP) can
be used to allow robots to quickly recognize the activities
performed by others. It has been suggested that plan recognition (PR) and natural language processing have much in
common and are amenable to similar analyses. Geib and
Steedman (2007) formally presented the following correspondence between PR and NLP:
• input is a set of observed actions (PR) or words (NLP),
• observations are organized into hierarchical data structures such as hierarchical task networks (HTNs, PR) or
parse trees (NLP), and
• rules stating valid observation patterns for deriving the hierarchical data structure are represented through a library
of plans (PR) or a grammar (NLP).
As implied by the HTN representation, PR techniques often focus on the structural relationships between consecutive observations and ordered activities that comprise plans.
However, NLP commonly treats text as a bag-of-words and
c 2014, American Association for Artificial IntelliCopyright gence (www.aaai.org). All rights reserved.
22
2
RGB-D sensors are a commonly used tool for observing
human posture. As robots equipped with RGB-D sensors
are used in a variety of domains, predefining the activities
to be recognized may also be too limiting as we further discuss below. Section 2 follows with a brief background on
PR, AR, and LDA. Section 3 then investigates ways to represent the data as text and shows how LDA may be used
for performing PR and AR. Section 4 applies this to a small
dataset we collected and interprets the learned topics within
the plans. Recognizing plans and activities using the learned
topic model is tested by cross-validation in this paper, and
more rigorous evaluation of its performance will be a focus
of future work. We conclude with a discussion of the approach and its possible extensions in Section 5.
Background
Plan and Activity Recognition
PR is the inverse of the planning problem. Rather than
trying to derive a sequence of actions that can accomplish
a task, we observe some sequence of actions or changes
in the world state and try to identify the task. Past approaches to solving PR problems have ranged from purely
logical to partially statistical methods. Logical methods often use lists of rules and relationships between actions to
represent plans as structured objects such as grammars (Vilain 1990) and directed graphs. Statistical methods have
extended the logic framework by inferring the likelihoods
of different plans identified by the structured representations given various features of the problem (Pynadath and
Wellman 1995). Song et al. (2013) combine the two for a
statistical-relational approach that uses lifted information to
develop a Markov Logic framework that enforces temporal
constraints on observations from audio and visual input for
PR. However, their method assumes that the library of plans
and each plan’s composition is known. These assumptions
are commonly made in PR research.
While PR focuses on identifying the entire plan/task, AR
is more specific and tries to recognize the single activities
and/or actions that compose the plan (Goldman et al. 2011).
Hamid et al. (2007) learned suffix trees over subsequences
of events in order to use combinations of n-grams for multiple n to classify activities. They used these suffix trees
on sequences of events representing interactions with keyobjects in a kitchen to classify kitchen activities. Besides
classifying sequences of events, one of the primary applications of AR is to produce higher-level interpretations of sensor data as described in the motivation above. The inference
performed for AR is usually more machine learning centric
due to the uncertainty involved in mapping raw sensor data
to actual activities. Bayesian inference techniques similar
to the ones described above for PR have also been used in
AR. For example, Huỳnh et al. (2008) previously used topic
models with wearable sensors to decompose a user’s daily
routine into its single-activity components without human
annotation.
Motivation
Human-robot interaction (HRI) studies how to improve the
immersion of robots in social situations amongst humans.
As explained by Lösch et al. (2007), Sung et al. (2012), and
Zhang and Parker (2011), an integral component of successful interaction is the ability to predict what other agents are
doing in the environment. Thus real-time PR using only onboard sensors is an important aspect of effective collaborative behavior in machines. With a reasonable interpretation
of the actions of those around them, robots can appropriately
plan responses for common engagements that will inevitably
take place in the real world. Regardless of the domain, be it
personal robotics for household chores, industrial robotics
participating in the workforce, or aiding in dangerous activities such as search and rescue during natural disasters,
we find situations involving direct correspondence between
agents.
Most work with PR has not only been structural, but also
represented at a higher level. That is, the representation of
plans and actions assume that activities such as “move” and
“lift” are already determined. Raw sensor data does not return such information; it needs to be extracted using AR-like
approaches. One benefit of being able to identify topics from
sensor data is that we can produce a wrapper that can lift the
raw data to a higher level for use in well-studied structural
PR techniques. In addition to integration with such techniques, we can take advantage of the simultaneously derived
distribution of these topics to approximate the “gist” of the
plan to recognize. This may be used as a guide or heuristic
when identifying the executed plan in the library of plans.
Humans do not always act in a structural manner. As
shown by partially ordered plans, some actions have preconditions and effects that allow them to be performed independently. Hence human agents may perform subtasks in
an order not specified by the robot’s plan library, or the human may perform some extraneous actions that would serve
as noise in the execution sequence. Being able to analyze
the distribution of activity topics in an execution sequence
introduces a computationally feasible method for handling
noise and omitting ordering. Considering all the combinations of execution sequences in order to omit the noisy actions as well as reorder independent subsequences would require enormous effort. In real-time systems, this can be a
considerable bottleneck.
Latent Dirichlet Allocation
LDA is a probabilistic topic model that considers a set of
documents D to be generated from a set of topics T . These
topics provide a semantic interpretation of the documents
without regarding syntax. The distributions of topic allocations over documents θd∈D and the distributions of words
over topics φt∈T are each drawn from Dirichlet distributions
specified by hyperparameters α and β respectively. Each
word wi in a document d is assigned a single topic zi ∈ T
that is drawn from θd such that wi would be drawn from
φzi . Only the words in each document w
~ are observed; ~z,
~ and φ
~ are all latent variables and the hyperparameters are
θ,
selected as priors. Steyvers and Griffiths (2007) provide an
in-depth explanation of this approach.
Through statistical sampling methods such as Gibbs sampling, it is possible to find assignments for the latent variables that (nearly) maximize the expected likelihood of gen-
23
Number of Unique Word Tokens at Various Granularities
Postural
Data
Granularity
Topic
Inference
Word
Tokens
Number of Unique Word Tokens (out of 16646)
Sensor
Input
16000
XXX.
YYY.
ZZZ.
Test Set
Train Set
Doc’s
Doc’s
# Topics
Recognized
Plan
Topic
Model
14000
12000
10000
8000
6000
4000
2000
0
0
10
20
30
40
50
Granularity
LDA
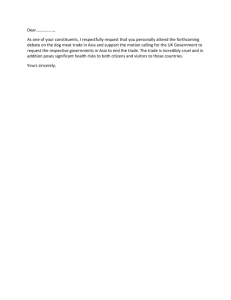
Figure 2: A plot of unique word tokens in the collection of forty
Figure 1: Applying LDA to PR and AR from recorded sensor data
recorded plan executions at various granularities.
to learn actions (topics) and predict plans (documents).
ordinates change position between frames. From these matrices, we derive sets of triples representing the human body
at key points of motion called joint-angles. Each triple contains the pitch, roll, and yaw that denote the vector whose
initial point is the head and endpoint is another joint in the
sensed agent’s body (depicted under the “Postural Data” box
in Figure 1). We consider fifteen joints and each word token
45
is in [−π, π] which is an uncountably infinite vocabulary
with a very small likelihood of duplicate tokens. However,
~
finding each activity’s distribution over the word tokens φ
requires a countable vocabulary with some duplicate poses
in the collection of plan executions. Wang and Mori (2009)
and Zhang and Parker (2011) created codebooks to accomplish this by clustering the images of the training set and
selecting the center of each cluster as a word token in their
vocabulary; all images in the same cluster (including those
in the test set) are assigned this token value.
We make the vocabulary finite and increase the likelihood
of having duplicate word tokens by discretizing the space
with respect to a granularity parameter. For granularity
g ∈ N, we map each angle ϕ to integer 0 ≤ i < g such that
(i / g) · 2π ≤ ϕ + π < ((i + 1) / g) · 2π. This reduces the
45
vocabulary to {0, 1, . . . , g − 1} which is still large in size
for small g, but we must consider that many of these poses
do not represent feasible body structures; for example, the
limitations of each joint’s range of motion will prevent such
word tokens that include hyperextended limbs. This is analogous to the fact that many combinations of orthographic
letters do not form actual words used in a language. An advantage of using granularity to discretize the space over the
use of a codebook is that word tokens appearing exclusively
in the testing data may appear as new tokens rather than be
assumed to be a previously encountered pose from the training data. That is, it is possible to encounter new poses for
which the system was not trained. These can be handled by
smoothing the multinomial parameters (Blei et al. 2003).
Figure 2 plots the number of unique word tokens in our
collection of documents at various granularities. As ex-
~ φ
~ w,
erating the observed documents P ~z, θ,
~ α, β =
~
~ β
P w
~ ~z, φ
· P ~z θ~ · P θ~ α · P φ
P (w
~ |α, β )
where the denominator is just a normalizing constant. This
is referred to as training the topic model. When these as~ may be studied to learn more
signments are found, θ~ and φ
about the extracted topics (which requires a human’s interpretation since LDA is unsupervised) and their presence in
each document. We use the MALLET software (McCallum
2002) for training and performing our experiments.
3
Applying LDA to Plans
Using a RGB-D sensor that can approximate human postural
data, we recorded a dataset of forty plan executions that were
composed of subsets of ten actions (choice of hands and feet
varied): standing, walking, reaching upwards, waving hand
while stationary, waving while walking, throwing, jumping
with hands down at one’s side, jumping while reaching upwards, squatting, and kicking. The sequences of actions
were generated to represent everyday human tasks in which
a robot could assist or interact. For example, “reaching for
an item on top of a tall bookshelf” is represented by the sequence of stand, reach upwards, jump while reaching upwards, stand. During the recording, an actor followed a narrator’s instructions to perform the plan as specified. Each execution was recorded at thirty frames per second and lasted
varying lengths less than one minute. We henceforth consider each “document” to be a recorded plan execution, each
“topic” to be an action or activity, and each “word token” to
be a pose extracted from a single frame. Figure 1 shows the
pipeline used to process the data, which we describe below.
Textual Representation
The raw data recorded by the RGB-D sensor is in the form
of homogenous transform matrices that specify how the co-
24
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0.5
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
−1
−1
−1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
−1
−1 0
1
0
−1
−1
0
1
0
−1
−1 0
1
0
−1
−1 0
1
0
Topic 1
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1.5
1
−1
0
−1
−1
0
1 −1.5
1
−1
0
−1
−1
0
1 −1.5
1
−1
0
−1
−1
0
1 −1.5
1
−1
0
−1
−1
0
1 −1.5
1
−1
0
−1
−1
0
1 −1.5
1
0.5
−1
0
−1
−1
0
1 −1.5
1
−1
0
−1
−1
0
1 −1.5
1
Topic 2
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0.5
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
−1
−1
−1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
1 −1.5
1
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
0
−1
−1 0
Topic 3
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1.5
1
−1
0
−1
−1 0
1 −1.5
1
−1
0
−1
−1 0
1 −1.5
1
−1
0
−1
−1 0
1 −1.5
1
−1
0
−1
−1 0
1 −1.5
1
−1
0
−1
−1 0
1 −1.5
1
0.5
−1
0
−1
−1 0
1 −1.5
1
−1
0
−1
−1 0
1 −1.5
1
Topic 4
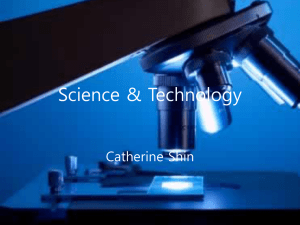
Figure 3: Most likely poses for four selected topics (actions) from the fifteen-topic model learned from the plan execution traces with
granularity thirty-five. We interpret them as (top to bottom) throwing (right hand), hand raised, walking, and arms in carrying position.
pose wi0 is associated with action zi0 which is drawn from θ0
such that wi0 would be drawn from the distribution φzi0 .
As it simulates each generation step, it multiplies the current likelihood of generation with the likelihood of the simulated step. The values of the unobserved variables θ0 and ~z 0
that maximize this generation likelihood are the inferred values. The process of inferring the values of ~z 0 is an AR system since it identifies the most likely actions for the observed
poses. The distribution of activities θ0 from which each zi0 is
drawn represents a plan when viewed as a bag-of-words because the sequence of actions is no longer ordered; thus we
consider the inference of this distribution to be a PR system.
Hence LDA integrates both the AR and PR processes into
a single system for simultaneous inference rather than channeling information from an AR system to a PR system. To
perform this inference efficiently, Gibbs sampling may be
used to obtain a good estimate. The use of log-likelihoods is
also necessary to avoid underflow from multiplying so many
probabilities together.
pected, increasing the granularity reduces the number of duplicate poses since each interval is smaller. One interesting feature of the plot is the drastic difference between the
number of unique tokens based on the parity of the granularity. This phenomenon may be explained through kinematics. When an even granularity is used to discretize the
space, small joint movements near the vertical axis (where
ϕ = 0) will be assigned to one of two different groups:
(g / 2) if ϕ ≥ 0 and (g / 2) − 1 if ϕ < 0. On the other hand,
an odd granularity will always assign these movements to
((g − 1) / 2). For naturally small body movements and oscillations about the vertical axis such as an arm swaying
slightly at the user’s side, the mapping between two groups
rather than one creates significantly larger numbers of integer combinations for even granularities compared to odd
ones.
Recognizing Activities and Plans
Performing AR and PR with our learned topic model requires finding the likelihood that the model would generate
other action sequences that belong to this corpus. Because
topic models are generative, it can find this likelihood for an
unobserved execution sequence w
~ 0 by simulating the generation process described in Section 2’s LDA background.
The new plan’s distribution over actions θ0 is drawn from the
Dirichlet distribution with hyperparameter α used to draw
~ and φ
~ remains unchanged. Then each new
each entry of θ,
4
Experimental Results
For varying granularities between one and fifty-one, we ran
LDA on our corpus of forty recorded plan executions with
2000 iterations of Gibbs sampling, initial hyperparameter
values α = 50 and β = 0.01, and hyperparameter optimization every ten iterations. The best choice for number of topics varies with respect to the context of the corpus. A smaller
25
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
Cross-Validation Results (20 Runs, 80% Training)
-80000
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
−0.5
−0.5
−1
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−0.5
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
−0.5
−0.5
−1
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0
0
−0.5
−1
−1.5
1
−1
0
0
−0.5
−1
−1.5
1
−1
0.5
0.5
0.5
0.5
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0.5
0.5
0.5
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
−1
−1
−1
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−1
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
0.5
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
−0.5
−1
−1.5
1
−1
0.5
0
0
0
0
0
−0.5
−0.5
−0.5
−0.5
−0.5
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−1
0.5
0
−0.5
−1
−1
0
1
−1.5
1
−1
-110000
-120000
-130000
1
0.5
0
0
−0.5
−1
−1
−1
0.5
With Stopwords
0
−0.5
−1
−1
0
1
−1.5
1
−1
1
0.5
0
0
−0.5
−1
−1
−1.5
1
5
10
15
20
Number of Topics
1
0.5
0
0
−0.5
−1
−1
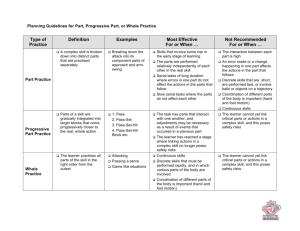
Figure 5: The results of running cross-validation on our dataset
with twenty runs for each pairing of a subset of various granularities and numbers of topics.
1
0.5
0
0
−0.5
−1
−1
0
−0.5
−1
−1
0
−0.5
−1
−1
0
−0.5
−1
−1
0
−0.5
−1
−1
pict particular actions. This typically holds for larger granularities. However, smaller granularities, especially with
odd parity, appear to suffer from having too many duplicate
poses that cluster into every action. This is due to their high
frequency throughout all the recorded executions. This is
especially the case for the generic standing pose at lower
granularities; it accounts for almost half the word tokens in
the corpus at granularity three. In NLP and information retrieval, such word tokens are referred to as stopwords and
they are removed from the documents prior to training. By
removing these stopwords, the actions are more easily distinguishable. Figure 4 shows the change in most common
poses in the five-topic model with granularity three when all
poses with frequency greater than 100 are regarded as stopwords – in particular, the most common pose in the top-left
corner is no longer the same after removing the stopwords.
To explore the effectiveness of using different granularities and topics, we perform a twenty-run cross-validation
over the forty recorded plan executions. In each run, we select thirty-two recordings (eighty percent) to train our LDA
topic model and then use it to find the log-likelihood of the
remaining eight recordings. The log-likelihood is derived
from simulating the generative process described in Section 3 above; we use it to find the probability that the trained
LDA topic model derives each of the eight recordings in the
testing set. A plot of these results using up to twenty topics
and odd granularities from twenty-one to forty-one is shown
in Figure 5. We note two particular trends: (1) the overall
log-likelihood decreases as the discretized space becomes
more fine-grained and (2) the overall log-likelihood is increasing as more topics are used in the model.
The first trend is most likely a consequence of the increase
in unique word tokens which also increases the chance of
having poses exclusively appear in the test set. The model
was not trained with such poses so that the probability of
generating recordings with them is very low. The second
trend typically implies that we should learn models with
1
0.5
0
1
0.5
0
1
0.5
0
0.5
0
−1
−1
−1
1
0.5
−0.5
−1.5
1
0
−0.5
0.5
−0.5
−1.5
1
0
0.5
0
−0.5
−1.5
1
1
0.5
-100000
0.5
−0.5
−1.5
1
−1
-140000
0.5
0.5
−1
0.5
0.5
−1.5
1
0
−0.5
−1
1
0.5
0.5
−1.5
1
0
−0.5
−1
1
0.5
1
0.5
0.5
0
−0.5
−1.5
1
Log-Likelihood of Test Set
-90000
0.5
Granularity
21
23
25
27
29
31
33
35
37
39
41
−1
1
0.5
0
0
−0.5
−1
−1
−1.5
1
1
0.5
0
Without Stopwords
Figure 4: Most likely poses for the five-topic model using granularity three before and after removing stopwords. A red box is
drawn around the stopword appearing in every topic.
number of topics will cluster many poses into a single activity yielding either an overarching theme (when reasonably
small) or a collection of unrelated poses (when too small). A
larger number of topics will sparsely store poses in each activity which will result in very specific actions or ambiguity
where several actions are nearly identical. Hence we considered the following options: ten topics since we composed
our documents using subsets of ten actions, fifteen topics in
case the differences between left and right hands were distinguishable, and five topics since the lack of position data
may make some poses look identical (such as standing and
jumping).
With 13033 unique word tokens out of 16646, the distribution over poses and number of duplicate poses yielded
good results for our corpus at granularity thirty-five. Figure 3 renders the most likely poses for four selected actions
from the fifteen-topic model. The most likely poses captured in each topic are easily relatable to one-another and de-
26
joints are different), we plan to train a PR and AR system
on them and possibly find a mapping between the encodings
and/or generated word tokens. Not only would this give us
access to a larger-scale study, but we would also have access
to a large collection of data to train a more robust recognition
system that may be used for plan recognition with a RGB-D
sensor. It should also provide more insight into how many
topics to use to best represent the data without overfitting.
Lastly, we are interested in modifying the LDA topic
model to incorporate additional features besides just the
pose data. For example, the objects with which users interact can have implications regarding the actions taken. This
may disambiguate between poses as well; the aforementioned confusion between squatting and jumping would be
easier to differentiate if it was known that the observed individual was using a jumprope. In addition to objects, subject
features such as height and strength may also affect which
actions people take to perform a planning task. We would be
interested to see if this has any impact on the topic distributions. If the variation in topics is large enough between these
features, then the different sets of available actions to each
subject class may be regarded as different languages. Extensions of LDA such as Polylingual Topic Models (Mimno et
al. 2009) exist that can be used for modeling topics across
languages. It is important to know whether different groups
of subjects should be considered differently when performing PR and AR so that general-purpose robots and other interaction systems will be better suited to cooperate with a
greater variety of users.
This shows that besides the new directions for studying
PR and AR, we must additionally consider how to integrate these systems with actual robots and use them in realistic situations. This raises questions regarding representation and real-time performance constraints. For example,
how should the distribution of recognized activities from our
topic model-based system be used for developing responsive behavior? After incorporating more contextual information such as objects, the actions could be converted into a
STRIPS-like format for use in a planning system. Then for
such a representation, to what extent can planning be performed alongside PR and AR to produce appropriate interactivitive experiences for those collaborating with the robot?
A comparision of the inferred distribution (the plan) and the
currently observed distribution may indicate which activities
have yet to be performed. Whether those actions are not yet
performed because the human is acting to satisfy some preconditions or because they form a subset of actions that may
be performed in parallel (for partially ordered plans) will affect what goal conditions the robot should consider during
planning. We will investigate these questions during our future endeavors. It is likely that the answers will influence
research on PR and AR as much as this research will impact
future work for fields in robotics such as HRI.
more topics because we have not yet maximized the loglikelihood. However, we employ our knowledge of the domain to identify that twenty-topics is too many topics to consider. The recordings are only composed of approximately
ten actions which should be analogous to a ten-topic model,
but additional details can be extrapolated from the ten actions such as whether the left/right hand is used, whether the
leg is bent or straight, and whether one’s head is bent forwards or looking ahead. These extraneous features may be
regarded as new topics when there are too many topics available in the model and could serve as a sign of overfitting the
training set. Looking at the most likely poses for these activities provides evidence for this claim as there appear to
be overlap between actions. We will look into formalizing
signs of overfitting with respect to the number of topics in
future research.
5
Discussion
Most plan recognition research has focused on the use of
structural methods that enforce strict action ordering. However, many plans have partially ordered components and human agents can execute plans with extraneous actions that
introduce noise. We investigated the treatment of plans as
bags-of-words using sensor-level data from a RGB-D sensor by discretizing the information into a textual format that
may then be analyzed using LDA topic models. This method
shows potential for application in real-time PR and AR systems for HRI that can identify plans as distributions of actions just as natural language documents are composed of
topics.
Future Research
This exploratory study has revealed several new directions
for PR and AR research. One such direction involves taking advantage of the other data provided by the RGB-D
sensor, primarily position. We only studied poses for our
topic models in this work which resulted in ambiguities between some actions such as jumping and squatting or standing (when small like a hop). However, these nearly identical
poses may be distinguished by their difference in vertical
position. Likewise, we could identify orientation and destination which would enable us to integrate some of the past
relational PR methods with our purely statistical method. A
second direction is to investigate whether information from
other types of sensors can yield word tokens to be applied to
LDA for PR and AR. The RGB-D sensor’s pose data represents a human form which is more intuitively mappable to
activities, but other sensors may be able to provide equally
useful information.
A third direction will be to perform a larger-scale study
with more realistic parameters since the dataset used in
this investigation only contains forty recorded plan executions in a controlled test environment. This would include
more diverse plans, possible actions, and recorded subjects.
There are also benchmark datasets that contain motion capture pose data such as the Carnegie Mellon Motion Capture
Database (Hodgins). Although the encoded posture is different from the one retrieved by RGB-D sensors (the recorded
Acknowledgements
The authors thank the reviewers for their insightful comments that helped improve the manuscript. Support for this
work was provided in part by NSF grant IIS-1116917 and
ONR grant MURI-N000140710749.
27
References
In Proceedings of the IEEE International Conference on
Robotics and Automation, pages 842–849, May 2012.
Marc Vilain. Getting serious about parsing plans: A grammatical analysis of plan recognition. In Proceedings of the
8th National Conference on Artificial Intelligence, pages
190–197, 1990.
Yang Wang and Greg Mori. Human action recognition by semi-latent topic models. IEEE Transactions on
Pattern Analysis and Machine Intelligence Special Issue
on Probabilistic Graphical Models in Computer Vision,
31(10):1762–1774, 2009.
Gang Wang, Ye Zhang, and Fei-Fei Li. Using dependent
regions for object categorization in a generative framework. In Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern Recognition,
pages 1597–1604, 2006.
Hao Zhang and L.E. Parker. 4-dimensional local spatiotemporal features for human activity recognition. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2044–2049, Sept 2011.
David M. Blei, Andrew Y. Ng, and Michael I. Jordan. Latent dirichlet allocation. Journal of Machine Learning Research, 3:993–1022, 2003.
Hung H. Bui, Dinh Q. Phung, and Svetha Venkatesh. Hierarchical hidden markov models with general state hierarchy. In Proceedings of the 19th National Conference on
Artificial Intelligence, pages 324–329, 2004.
Shai Fine, Yoram Singer, and Naftali Tishby. The hierarchical hidden Markov model: Analysis and applications.
Machine Learning, 32(1):41–62, 1998.
Christopher W. Geib and Mark Steedman. On natural language processing and plan recognition. In Proceedings of
the 20th International Joint Conference on Artificial Intelligence, pages 1612–1617, 2007.
Robert P. Goldman, Christopher W. Geib, Henry Kautz,
and Tamim Asfour. Plan Recognition – Dagstuhl Seminar
11141. Dagstuhl Reports, 1(4):1–22, 2011.
Raffay Hamid, S. Maddi, A. Bobick, and I. Essa. Structure
from statistics - unsupervised activity analysis using suffix
trees. In IEEE 11th International Conference on Computer
Vision, pages 1–8, Oct 2007.
Jessica K. Hodgins. Carnegie mellon motion capture
database. http://mocap.cs.cmu.edu.
Tâm Huỳnh, Mario Fritz, and Bernt Schiele. Discovery of
activity patterns using topic models. In Proceedings of the
10th International Conference on Ubiquitous Computing,
pages 10–19, 2008.
M. Lösch, S. Schmidt-Rohr, S. Knoop, S. Vacek, and
R. Dillmann. Feature set selection and optimal classifier
for human activity recognition. In Proceedings of the16th
IEEE International Symposium on Robot and Human interactive Communication, pages 1022–1027, Aug 2007.
Andrew Kachites McCallum. Mallet: A machine learning
for language toolkit. http://mallet.cs.umass.edu, 2002.
David Mimno, Hanna M. Wallach, Jason Naradowsky,
David A. Smith, and Andrew McCallum. Polylingual topic
models. In Proceedings of Empirical Methods in Natural
Language Processing, pages 880–889, 2009.
David V. Pynadath and Michael P. Wellman. Accounting
for context in plan recognition, with application to traffic
monitoring. In Proceedings of the 11th Conference on Uncertainty in Artificial Intelligence, pages 472–481, 1995.
Young Chol Song, Henry Kautz, James Allen, Mary Swift,
Yuncheng Li, Jiebo Luo, and Ce Zhang. A markov logic
framework for recognizing complex events from multimodal data. In Proceedings of the 15th ACM on International Conference on Multimodal Interaction, ICMI ’13,
pages 141–148, New York, NY, USA, 2013. ACM.
Mark Steyvers and Tom Griffiths. Probabilistic topic models. In T. Landauer, S. Dennis McNamara, and W. Kintsch,
editors, Latent Semantic Analysis: A Road to Meaning.
Laurence Erlbaum, 2007.
Jaeyong Sung, C. Ponce, B. Selman, and A. Saxena. Unstructured human activity detection from RGBD images.
28