Intelligent Sensor Integration and Management
with Cooperative,
Heterogeneous Mobile Robots
From: AAAI Technical Report WS-99-15. Compilation copyright © 1999, AAAI (www.aaai.org). All rights reserved.
Robin Murphy, Aaron Gage, Jeff Hyams, Mark Eichenbaum,
Brian Minten, Min Shin, Brian Sjoberg
Mark Micire,
ComputerScienceand EngineeringDepartment,Universityof SouthFlorida,
4202E. Fowler Avenue,TampaFL 33620
Abstract
The two-robotentry from the University of SouthFlorida
received a TechnicalInnovationAwardfor Conceptualand
Artistic Designin the Horsd’OeurvesAnyone?
event of the
1999 AAAIMobile Robot Competition. The entry was
fielded by a team of seven students from the Computer
Scienceand Engineeringand Art departments.Threeof the
team memberswere undergraduates. The robots were
uniquein their approachto maximizing
the time the robot
wasengagedin serving: one robot acted as the server, who
wouldcall the secondrobot to bring refills as needed.This
allowedthe entry to creatively exploit the differences in
sensors on the tworobots. Theentry wasalso novelin its
application of multi-sensor integration within a hybrid
deliberative/reactive architecture. Fivesensor modalities
were used (vision, thermal, range, sonar, and tactile).
Behavioral sensor fusion was used for five reactive
behaviors in eight states, significantly improving
performance.
.
Each of the two robots can be thought of as actors,
literally following abstract behaviors called scripts
(Murphy 1998). The Borg Shark was the "star" of the
show. She was given an aggressive, smarmypersonality.
She is programmedto navigate an a priori route using
dead reckoning and sonars, pausing at waypoints to look
for humans with her camera. If she sees humans (and
confirms with thermal sensor), she attempts to makeeye
contact with them and scan the group in a natural way
while looking for VIPs (special colored ribbons). She uses
her laser to count the numberof treats removedfrom her
jaws, and then calls Puffer to bring refills. If someone
grabs treats, but isn’t visible, Sharkwill stop and look for
the person and other humans to serve. She talks via
DECtalkbut cannot perlbrm voice recognition.
1 Introduction
The USFentry was motivated by our ongoing research in
intelligent
sensing management. The AAAIevent
provided an interesting domainto makeprogress toward
three technical objectives:
1.
2.
with own capabilities,
communicating with each
other at a symbolic, human-likelevel.
Gain more experience with interacting with humans.
Previous efforts by the USFrobots have concentrated
on interacting with humansto accomplish the task.
This entry considered the additional challenges of
howto attract attention to the robots andentertainthe
audience. Costumes and interactive
media were
developed by an undergraduate student from the USF
Art Department,
Push the envelope on hybrid deliberative~reactive
architectures
by expanding them to include
intelligent sensor integration and management
at all
levels. A specific goal was to demonstrate a new
algorithm, MCH,for dynamic allocation of sensor
and effector resources (Gage and Murphy1999). The
implementation of MCHrequired the integration of
deliberative scheduling with reactive behavioral
execution. The competition was a good test bed for
dynamic sensor allocation because the USF entry
involved five sensing modalities (vision, thermal,
laser, sonar, contact) and five effectors (drive, steer,
pan,tilt, fan).
Demonstrate advances in cooperation between
multiple, heterogeneousrobots to achieve a task. The
USFentry treated each robot as an independent agent
13
The Puffer Fish was assigned a supporting role of aiding
the Borg Shark. It was given a personality and body
language associated with being (grumpy, resentful of
working for the Shark). Puffer Fish sleeps until
"bothered" by humans(it whines and turns its "head" of
cameras away muchas a sleeping child would do), or is
awakenedby a request from Shark. Then she navigates to
and from the Borg Shark’s estimated coordinates and
homebase using sonars and vision. If path is blocked or
annoyed (such as when she is near the Borg Shark),
Puffer Fish lives up to her nameand puffs up.
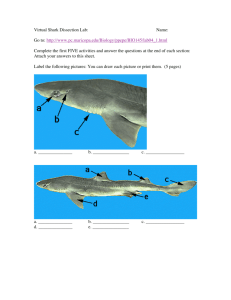
2 Robots
The entry consisted of two Nomad200 robots, Butler (aka
Borg Shark) and Leguin (aka Puffer Fish), costumedwith
interactive media by the USFArt department. The robots
were heterogeneous in sensing capabilities
and
functionality. The robots are shownin Figure 1.
a.
The software built on previous work from manysources.
First, both robots were programmedunder the biomimetic
SFX architecture.
This provided an object-oriented
framework for coordinating reactive behaviors and
deliberative software agents. The entry also used a form
of the vector field histogram (VFH)obstacle avoidance
algorithm provided by the Naval Research Laboratory.
Instead of using an HSVor RGBcolorspace, all color
vision used the Spherical Coordinate Transform (SCT)
taken from medical imaging (Hyams, Powell, and
Murphy1999). Third, the reactive layer made use of
large existing library of behaviors developedfor the 1997
AAAIcompetition and Urban Search and Rescue work.
C~b~
; Cor~x4ike
’, functions
b.
Figure 1 Robots in costumes: a) Borg Shark. Thermal
sensor is the "third eye" and Sick laser is inside
mouth,b) Puffer Fish with striped skirt inflated.
Both robots have 2 CPUs ( 166MHzPentiums on Borg
Shark, and 233MHzPentiums on Puffer Fish), two
cameras mountedon a pan/tilt head, and 2 Matrox Meteor
framegrabbers. Each was programmedin C++ (reactive
layer) and LISP (deliberative layer) under Sensor Fusion
Effects architecture
(Murphy 1998). All execute
autonomously with all onboard computation, but
communications with a local workstation is maintained
via radio ethernet in order to monitor progress. The robots
are also permitted to communicatewith each other via
radio ethernet. In addition to the commonaspects, Borg
Shark has redundant sensor rings (upper and lower),
E2T thermal sensor, a Sick planar laser ranger, and
redundant sonar rings. Puffer Fish has the common
components
plus an actuator for inflating her skirt.
Borg Shark suffered one hardware failure, one software
driver failure on site, and had one significant design flaw.
Her power board had a circuit failure and was repaired
onsite by the team. This resulted in about seven hours of
down time. A bug was discovered in the Nomadic
software driver, robotd, for controlling the redundant
sonar rings. Whenthe rings, either polled singly or
together, received manyclose "hits" the robotd driver
would crash and send the robot into a slow circle. This
bug had been intermittently seen before, but since there
were no patches from the manufacturer and the source
code is closed source, the decision was madeto field the
entry anyway. At the competition, Borg Shark crashed
over 10 times in two hours. In manycases, the audience
thought the frequent circling behavior was programmed.
3 Previous
Work
14
Focus¢~f attention,
recalibration
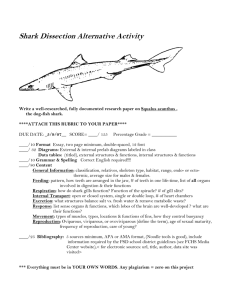
Figure 2 Layout of SFXarchitecture.
The SFX architecture has been used since 1990 for
mobilerobot applications emphasizingthe role of sensing
and sensor fusion in both behaviors and in more cognitive
functions. Figure 2 shows the organization of the SFX
architecture.
Dashed boxes indicate areas of the
architecture where sensing functionality corresponds to
the organization of sensing in the mammalian
brain. The
mainpoint of the architecture is that it is divided into two
layers: reactive and deliberative, The reactive layers
consists of a reactive behaviors which use sensor data
directly. All sensor processing, representation, and fusion
is local to the behavior, The deliberative layer consists of
a set of software agents whichmanagedifferent activities
(ex. Sensing Manager, Effector Manager), or create and
operate over global data structures (ex., the Cartographer).
One of the manyadvantages of using mangerial software
agents is that they can serve as the glue for basic modules.
For example, under SFX sensors and effectors are
modular and do not need to knowthe presence of others.
The Sensor Manager establishes
the needed
correspondences, providing a "plug and play" framework.
each behavior with sensing resources, and maximizethe
quality (or preference) of sensing for all behaviors.
Second, the allocation mechanismmust operate in realtime (on the order of 33 msec) to permit a smooth
transition between behavioral regimes as behaviors are
unpredictablyinstantiated and de-instantiated.
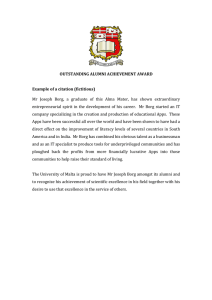
Figure 3 Layout of intelligent
architecture.
sensing within the SFX
5 Advances in Intelligent
Sensing
Previous work by (Gage and Murphy1999) demonstrated
in simulation that a variant of the MIN-CONFLICT
scheduling algorithm is well-suited for this problem. The
variant is called Min-Conflict with Happiness, or MCH,
because it makes all behaviors "happy" by optimizing
their preferences. For the AAAIcompetition, MCHwas
implementedin the Sensing and Effector Manageragents
within the deliberative layer of SFX, and was used on
both robots. It functioned correctly, handling up to five
behaviors and five sensors through eight behavioral
control regimes.
The resulting dynamic sensor and effector allocation
process is as follows. Whena behavior is instantiated, it
makes a request to the Sensor Manger for a logical
sensor(s) and to the Effector Mangerfor an effector. The
request to the Sensor Manageris in the form of an a priori
list of logical sensors in a preference ordering. The
requests, along with the current allocation, can be treated
as a plan or schedule. If multiple behaviors request the
logical sensor, then the conflict over physical resources
can be considered a failed plan. Min-Conflict uses plan
repair, so it finds a set of alternative bindings. The
Happiness modification
executes Min-Conflict
recursively to achieve a global optimization.
The research focus of this entry was on intelligent
sensing. It makes contributions to the managementof
sensing and multi-sensor integration at the behavioral
level.
5.1 Intelligent
Sensor Management
Sensor managementis needed for robots with a large set
of concurrent behaviors operating with a small set of
general purpose sensors and effectors. This is a many-toone relationship and suggests that contention for
resources will be a problem. However,the small set of
general purpose sensors are tailored for specific behaviors
by processing algorithms. Due to the breadth of sensor
algorithms, a robot may have several redundant (or
logically equivalent) means of extracting the same
percept. An example is extracting range from vision: a
robot might have vision-based algorithms using depth
from motion, depth from stereo, depth from texture, as
well as laser and sonar. In SFX, equivalent (physical
sensor, perceptual processing algorithm) modules are
called logical sensors after (Henderson and Shilcrat
1984). The correspondencebetween behaviors and logical
sensors can be one to many. This means that contention
for physical sensing can often be resolved by finding
equivalent logical sensors that use alternative physical
sensors. The sameissues apply to effectors.
5.2 Multi-sensor Integration
The USF entry also demonstrated
multi-sensor
integration, cueing, and focus-of-attention. Multi-sensor
fusion was added at the behavioral level to overcome
noise and unreliable sensing algorithms without adding
computational complexity. Borg Shark used color and
motion visual face detection and tracking algorithms.
However due to the complex environment of the
competition, these algorithms would return a false
positive on the order of 25%of the time. By adding the
thermal sensor to the behavior (must have both a visual
indicator and a thermal indicator to be a face), false
positives were almost totally eliminated. Borg Shark also
used sonars to reduce false positives from the laser in
counting treat removal. The laser would intermittently
give false returns, particularly in wide open spaces. This
would result in a false treat removal count and a
prematurecall for a refill. Tocombatthis, sonar data from
the front of Borg Shark was fused to suppress false
returns.
The mechanism for allocating sensing resources is
complicated by two factors. First, there are qualitative
differences in logical sensors. A set of equivalent logical
sensors mayproduce the same percept but they are likely
to have unique characteristics
(update rates,
environmental sensitivity).
As a result, there is
preference ordering on the logical sensors for a particular
behavior. The sensor allocation process should provide
15
The entry also used cueing and focus of attention
mechanisms to improve performance. Borg Shark had a
module that used the location of the humanface in the
image to determine the likely region of the badge in the
image. This was tested but not integrated into the final
code due to time limitations. Puffer Fish also used cueing.
For both finding BorgShark and the refill station, it used
dead reckoning to navigate to nearby the goal and then
trigger a vision-based recognition process.
The robots interact with humansin two ways. One was to
maximizepoints for recognizing the presence of humans
and what they were doing. Borg Shark needed to be able
to detect faces and interpret the meaningof badges. An
important lesson learned was that the sensing needed to
accomplish this was simple. Also, Borg Shark needed to
determine when humanshad removedalmost all the treats
in orderto call for refills,
A second form of interaction was howthe robots called
attention to themselves while protecting themselves from
negative human involvement. The USF entry used
costumesand interactive media to attract humaninterest.
Negative humaninvolvement was a concern for several
reasons. Previous observations of audience interactions
the AAAIMobile Robot Competition (Murphy 1997)
have yielded numeroustales of humanspoking at robots,
attempting to herd them into dangerous situations, and
even attempting to pick up robots and carry them off.
Also, people tend to crowdaround the robots preventing
navigation. The basis for the cooperative robot approach
was that the Puffer Fish could bring a refill faster than
Borg Shark could do it herself. If Borg Shark is blocked
by people, that is acceptable since she was the primary
interface to the audience, but if Puffer Fish was blocked,
she had to have a mechanismto encourage the crowd to
makeroomfor her. Finally, Puffer Fish was intended to
spend a large amountof time at the refill station in a
"’wait state" or sleeping mode.People were likely to a)
ignore the robot, which would not be an interesting
interaction, or b) comeup the robot and attempt to touch
sensors and generally interact in negative ways.
6 Advances in Agent Interactions
The USFentry also explored interactions between agents:
robots cooperating with other robots, and robots
interacting with humans.
6.1 Cooperation
Both robots act as peers, communicating only at
symbolic,human-likelevel ("I need a refill"). Arobot has
to wait for the other to completea particular task before it
can continue with its mission. For. example, Puffer Fish
must sleep until called by Borg Shark. Borg Shark must
stay in the sameplace until Puffer Fish arrives, otherwise
Puffer Fish may not be able to find Borg Shark in a
crowd. The waiting intervals are unpredictable.
The details of the cooperative interactions follow. When
Borg Shark runs out of food, she calls a subscript. The
subscript uses radio ethernet to call Puffer Fish for a refill
at the deliberative (symbolic) level. BorgShark transmits
to Puffer Fish her approximate X,Y coordinates. The two
robots use the same size occupancygrid with dimensions
in absolute coordinates, but not an actively localized map.
WhenPuffer Fish receives the radio message, she appears
to wake up. She then heads for Shark using a move-togoal behavior informed by dead reckoning. WhenPuffer
Fish is within 1.0 feet, she then shifts to visually looking
for Shark’s distinctive blue body to determine when
"close enough"(size, position in image)to stop.
To both present interesting personalities and attract
attention, the robots were conceptualized as a team of
colorful fish. BorgShark’s personality has been described
previously. Puffer Fish was given the role of the sullen
assistant. Since she is in a sleep modeat the refill station,
she was given literal "’sleeping" behaviors to run at that
time. She puffs up the inflatable skirt regularly to simulate
breathing. Her sonars remainactive, allowing her to turn
her camerahead awayto protect it from people while she
is sleeping and to complainthat she wants to be left alone.
Our observations indicated that the costumeand breathing
did attract people, and the "’complaining" behavior kept
theminterested but also prevented themfrom touching the
robot. As she is navigating she puffs up with her path is
blocked and has to turn more than 180 degrees; this
"amusingagression" was intended to be an alternative to
nudging people. Due to the numeroussoftware problems,
this effect was not observed at the competition enoughto
make any claims as to its effectiveness. As part of her
personality and to indicate that she had recognized the
Borg Shark, Puffer Fish also puffed up in the presence of
the Borg Shark.
At that point, both robots are nowin a wait state. The
humanhandler swaps trays, then communicatesto Puffer
Fish that the refill process is done by kicking her bumper.
(Borg Shark’s bumpersensor was malfunctioning.) Puffer
Fish uses radio ethernet to transmit to BorgShark that the
refill process is complete. Borg Shark resumes where she
left off in her serving script. Puffer Fish returns to the
refill area, again using dead reckoning to get in the
vicinity and then color segmentationto recognize the USF
banner.
6.2 Interactions
with Humans
16
7 Results
and Lessons
8 Summary
Learned
The USFentry can be summarizedin terms of the criteria
for judging and the research contributions it made. The
Borg Shark (Butler) robot was used for finding and
approachingpeople. It fused visual motion detection with
a thermal reading for reliability.
The face detection
algorithm did not execute while the robot was moving,
since it used a simple image subtraction technique. Borg
Shark was programmedto stop at multiple waypoints and
to stop if the laser detected a treat removalevent. Once
BorgShark had stopped and identified a face, it continued
to track the region for five seconds, makingeye contact. It
wouldthen scan the area for nearby humans.
The integrated performance of the robot team was poor.
Due to time spent on the hardware failure
and
unsuccessfully trying to create a workaround for the
robotd bug, the badge recognition software was tested
separately but not integrated with the system. The
blackboard system introduced several timing issues,
requiring re-tuning
after each addition of new
functionality. Altogether, Borg Shark was only able to
venture 10 feet before attracting a crowd, thereby causing
the robotd driver to crash. Over a two hour period, Borg
Sharkonly twice called for refills. The first time, Puffer
Fish crashed due to an apparent timing error. The second
time Puffer Fish did navigate to Borg Shark and the entire
refill process was carried out. Unfortunately, this occurred
when(and because) there was no one aroundto see it.
Both Borg Shark and Puffer Fish used sound and body
language to communicate information about what the
robots were doing and personality. While Borg Shark was
moving and serving, it used the onboard DECtalk voice
synthesizer to attract attention to itself with bad puns.
Puffer Fish exhibited a sullen personality, and used her
inflatable skirt to evincing sleeping (in and out breathing)
and annoyance (puffing when blocked or when serving
the fish).
Despite the poor integrated performance, the components
of the software worked well and showed advances in
robotics technology. The entry provided data showingthat
multi-sensor fusion significantly improves perception.
The MCHdynamic resource allocation algorithm and
Sensing and Effector Manageragents worked very well.
The modularity and ability of the managerial agents to
provide "plug and play" functionality was very clear as
two components (shark-finding
code and the radio
ethernet call for a refill) were integrated into the
architecture in less than 20 minutes. The impact of these
changes on the behaviors and other aspects of the
architecture were automatically propagated through the
system. Finally, the cooperation betweenthe robots at the
symbolic level appears promising.
Somepainful lessons were learned. Most significantly,
there is a major flaw in the SFXimplementation. The
blackboard/whiteboard global data structure is a good
idea, but our implementation executed too slowly and
required synchronization between processes. Weare now
moving the architecture
implementation to a CORBA
system. Also, color-based face detection is problematic.
Our use of the SCTcolor space solved color dependency
on lighting, but not the problemof howto segmenta face
from a similarly colored wall. The logical sensor was
eventually changedon site to one using motion detection,
but it was discovered that about half of the people
viewingthe robot stood very still confoundingthe results.
BorgShark handledthe task of getting refills in two ways.
First, it used sensor fusion of the laser range reading and
sonar to determine whena treat was removed(or at least
the likelihood that a hand had passed in the mouth).
Second, she used the Puffer Fish as a cooperative,
heterogeneous agent who had the sensing sufficient for
navigation but not for interactions with humans and
counting treat removal. The entry did not attempt to
manipulate trays or food, but instead relied on a human
handler to swaptrays.
Software was written and tested independently for
recognizing VIPs by their ribbons. This methodsearched
an area in the image for blobs of ribbons colors
represented in SCT space. The area of the image was
identified using a focus-of-attention based on the location
of the face in the image; the ribbons were assumedto be
on the left of the face. The SCTappeared quite robust in
test trials, but problems with the lower level software
prevented this being from integrated on the competition
version.
The research contributions of the USFentry were: an
extension to the SFXarchitecture exhibiting intelligent
sensor management, including dynamic sensor and
effector allocation using the MinConflict with Happiness
algorithm and multi-sensor integration, and an application
of cooperative heterogeneous robots. As such, it further
progress towards meeting the team’s ambitious technical
objectives.
The introduction of personality and emotional state
appears to be a very interesting research area. At first,
personality was treated as a hack for points on clever
human interaction
functionality.
However, the
implementation and general approach is converging on a
belief, desire, intention (BDI)framework.The major issue
is howto integrate personality across the deliberative and
reactive layers
17
Acknowledgments
Aspects of this entry were madepossible in part through
NSF grant CDA-9617309and NRLcontract N00173-99P-1543. The team would like to thank Alan Schultz and
Bill Adamsfrom the Naval Research Laboratory for code
and hardware loans, Dr. Bruce Marsh at USF for his
assistance, and especially the organizers, sponsors, and
judges of the AAAIcompetition.
References
Gage, A; and Murphy, R. 1999. Allocating Sensor
Resources to Multiple Behaviors, In Proceedings IROS
99. Forthcoming.
Hyams,J,;Powell, M.; and Murphy,R. 1999. Cooperative
Navigation of Micro-Rovers using Color Segmentation.
In Proceedings CIRA99. Forthcoming.
Murphy, R. 1998. Coordination and Control of Sensing
for Mobility using Action-Oriented Perception. In
Artificial Intelligence for Mobile Robots, MITPress,
1998.
Murphy, R, 1997, 1997 AAAI Mobile Robot
Competition, guest editoral, Robot Competition Corner.
In Robotics and AutonomousSystems, Nov., vol. 22, no.
1: Elsevier Press.
Henderson, T., and Shilcrat, E., 1984. Logical Sensor
Systems. In Journal of Robotic Systems, vol. 1, no. 2, pp.
169-193.
18