Today’s goals
advertisement

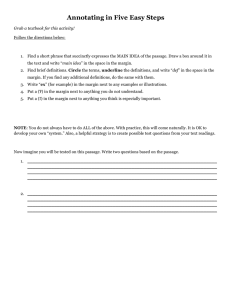
Today’s goals • • So far – Modeling the dynamics of electro-mechanical systems – Controling the dynamics of electro-mechanical systems • s-domain (root locus) • State space • Frequency domain (Bode plots) – Types of compensators • Proportional • Proportional-Derivative • Proportional-Integral (aka Ideal Integral) • Proportional-Integral-Derivative Today – Passive compensators • Lag • Lead • Lead-Lag – Time delays 2.004 Fall ’07 Lecture 37 – Friday, Dec. 7 Lag and lead compensators Compensator transfer function Gc (s) = z > p : Lag M (ω) [dB] 1 T , α > 1. Gc (s) = 1 s+ αT s+ 20log10 (z/p) z < p : Lead M (ω) [dB] 1 αT , α > 1. Gc (s) = 1 s+ T s+ 0 20log10 (z/p) 0 p 0 s+z . s+p z ω Φ(ω) deg. p z ω p z ω Φ(ω) deg. +90 −90 0 p 2.004 Fall ’07 z ω Lecture 37 – Friday, Dec. 7 Lag compensation • • Gc (s) = Improve steady-state error Increase phase margin s+z , s+p z>p Steady—state error without compensation: e(∞) = 1 , Kp = Gp (0). 1 + Kp Steady—state error with lag compensation: e(∞) = 1 . 1 + zKp /p Images removed due to copyright restrictions. Please see: Fig. 11.4 and 9.10 in Nise, Norman S. Control Systems Engineering. 4th ed. Hoboken, NJ: John Wiley, 2004. 2.004 Fall ’07 Lecture 37 – Friday, Dec. 7 Lead compensation • • Gc (s) = s+z , s+p z<p Increase bandwidth (faster response) Increase phase margin Images removed due to copyright restrictions. Please see: Fig. 11.7, 9.24, and 9.25 in Nise, Norman S. Control Systems Engineering. 4th ed. Hoboken, NJ: John Wiley, 2004. 2.004 Fall ’07 Lecture 37 – Friday, Dec. 7 Lead-lag compensation 1 1 s+ T1 T2 Gc (s) = × , α 1 s+ s+ T1 αT2 s+ Essentially equivalent to PID compensation – Lead component 0 -5 fixes transient -10 – Lag component -15 -20 fixes steady-state error -25 -30 Three degrees of freedom: -35 0.001 0.01 T1, T2, α • Phase (degrees) 20 logM • α > 1. 80 60 40 20 0 -20 40 -40 50 -60 -80 0.001 γ = 10 20 30 40 50 0.1 1 Frequency (rad/s) 10 100 40 50 30 γ = 10 20 γ = 10 20 30 0.01 Figure by MIT OpenCourseWare. 2.004 Fall ’07 Asymptotes for γ = 10 Lecture 37 – Friday, Dec. 7 0.1 1 Frequency (rad/s) 10 100 Nise Figure 11.11 Systems with time delay c(t) Gd (s) = e c(t − T ) G(jω) −sT = 6 |G(jω)| = G(jω) = e−ωT 1 −ωT Delay element (or “delay line”) M (ω) [dB] Time delay reduces the phase margin; therefore time delay results in reduced stability 0 ω 0 Φ(ω) deg. −90 ω 2.004 Fall ’07 Lecture 37 – Friday, Dec. 7 Cascading phase delay to a plant r(t) Gd (s) = e −sT r(t − T ) Gp (s) (plant) Image removed due to copyright restrictions. Please see: Fig. 10.54 in Nise, Norman S. Control Systems Engineering. 4th ed. Hoboken, NJ: John Wiley, 2004. 2.004 Fall ’07 Lecture 37 – Friday, Dec. 7 c(t) Example: time delay in feedback configuration r(t) + − Gd (s) = e K Gp (s) = s(s + 1)(s + 10) −sT c(t) Time delay T=1sec (K = 1) Images removed due to copyright restrictions. Please see: Fig. 10.55 in Nise, Norman S. Control Systems Engineering. 4th ed. Hoboken, NJ: John Wiley, 2004. 2.004 Fall ’07 1. Range of gain for stability Without phase delay, the phase angle is −180◦ at frequency 3.16rad/sec so the gain margin is 40.84dB. The closed—loop system is stable for 0 < K ≤ 1040.84/20 = 110.2. With phase delay, the phase angle is −180◦ at frequency 0.81rad/sec so the gain margin is 20.39dB. The closed—loop system is stable for 0 < K ≤ 1020.39/20 = 10.46. 2. Percent overshoot for K = 5 Since K = 5, the magnitude curve is raised by 20log10 5 = 13.98dB. The zero dB crossing occurs at frequency 0.47rad/sec. Without phase delay, the phase at the zero dB crossing is −118◦ , so the phase margin is −118◦ − (−180◦ ) = 62◦ . From the phase margin vs damping curve (2nd—order approx.) we find ζ = 0.64 ⇒ %OS = 7.3%. With phase delay, the phase at the zero dB crossing where the phase is −145◦ , so the phase margin is 35◦ . From the phase margin vs damping curve (2nd—order approx.) we find ζ = 0.33 ⇒ %OS = 33%. Lecture 37 – Friday, Dec. 7 Example: time delay in feedback configuration r(t) Gd (s) = e + − With phase delay T=1sec Without phase delay 1.4 1.6 1.2 1.4 1.0 1.2 1.0 c(t) 0.8 0.6 0.8 0.6 0.4 0.4 0.2 0.2 0 c(t) K Gp (s) = s(s + 1)(s + 10) −sT 0 0 2 4 6 Time (seconds) 8 10 0 5 15 20 Time (seconds) 25 30 Figure by MIT OpenCourseWare. Figure 10.56 2.004 Fall ’07 10 Lecture 37 – Friday, Dec. 7