Accurate Real-time Navigation of AVHRR data at high latitudes Adam Dybbroe Pascal Brunel
advertisement

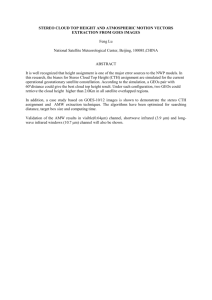
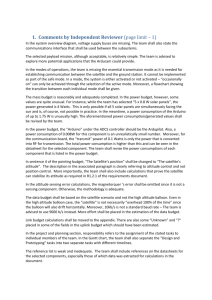
Accurate Real-time Navigation of AVHRR data at high latitudes Adam Dybbroe#, Pascal Brunel§, Anne Marsouin§, and Anke Thoss# Adam.Dybbroe@smhi.se #: Swedish Meteorological and Hydrological institute (SMHI), S-60176 Norrköping, Sweden §: Centre de Météorologie Spatiale, Météo-France, BP 147, 22302 Lannion Cedex, France, Norrköping, SMHI Introduction Smidbjerg, DMI NOAA14 The position of an AVHRR footprint depends on time, satellite position and velocity, satellite attitude (its orientation) and radiometer viewing geometry. The radiometer geometry is known before launch. Time is usually available, e.g. through the satellite time corrected from the satellite clock error, or from an independent clock. Satellite position and velocity may be calculated by an orbit prediction model ingesting daily bulletins (e.g. TBUS). The remaining unknown is the satellite attitude, or in fact how the actual attitude deviates from its nominal value. It is well known that without any kind of special post-processing locally received NOAA AVHRR data may have navigational errors causing the AVHRR footprints to be displaced several kilometres (not seldom around 10 or more). These errors fluctuates in time (significant changes from day to day is the normal) as can be seen from figure 1, and are caused by deviations between the nominal satellite attitude and the actual, unknown, attitude. Exact navigation may not be crucial when data are used only for image display at the forecaster’s desk. But inaccurate navigation may impose serious problems when data are used as input to a physical retrieval, like e.g. an objective cloud classification scheme (see figure 2). Most modern geophysical satellite retrievals rely on other data sources like e.g. high-resolution land Lannion, CMS NOAA16 Figure 1: RMS distance error in km for NOAA14 (top panel) and NOAA 16 (lower panel) during April and May 2001, using nominal attitude (red dashed) and after having applied the navigation adjustment (blue). Figure 2: Nowcasting SAF Cloud Mask assuming zero attitude (left) and with navigation adjustment using ANA (right) over the Norwegean Sea and Lofoten (Norway) April 8, 2001, 11:05 UTC, NOAA16. Blue and green are cloud free sea and land respectively, and white is either snow cover or sea ice. Clouds are either grey (cloud contaminated pixels) or orange (cloud filled pixels). Notice that the poor navigation causes an artificial increase in cloud cover along the coast, and that snow cover on land may be taken as sea-ice. use, and without precise navigation of the satellite data it is difficult to make full use of such data. Some retrievals rely on data from several satellite overpasses (e.g. snow cover mapping or SST’s), and are thus particular sensitive to fluctuations in navigation errors. The actual satellite attitude can be estimated if an adjustment is performed on the raw data (navigated using the nominal attitude) using known landmarks, as has been done operationally at CMS, Météo-France since 1990, using their Automatic Navigation Adjustment (ANA) technique. Attitude (Yaw, Roll and Pitch) errors during April and May 2001, as estimated by ANA at SMHI Norrköping (red) and at CMS Lannion (blue): NOAA 14 yaw error NOAA 14 roll error NOAA 14 pitch error For the material discussed in this poster we used NOAA HRPT data from these three receiving stations. The DMI station served as a backup for the station at Norrköping during temporary antenna failures in April and May 2001. ANA at SMHI - Preliminary results In January 2001 a first ANA users workshop was held at the Centre de Météorologie Spatiale, Météo-France, in Lannion, with the participation of SMHI, as well as the Danish and Norwegian Meteorological institutes. In spring 2001 the ANA software was installed along side AAPP (version 2.8) in a development environment at SMHI, and tested on locally received HRPT data. In our first tests we have been running ANA without the MAIA cloud mask. This set-up proved still to be able to eliminate cloudy landmarks (no land-sea mask or bad correlation) and the results showed to be in good agreement with those at CMS. Except for the pitch error in the beginning of April, there are no significant deviations in the attitude angles as estimated at SMHI and CMS. The solar activity was very high in early April 2001 causing large errors in the orbit prediction which show up as large pitch errors. From April 4 till April 8 the TBUS messages were not updated at SMHI, probably explaining the large deviations between the CMS and SMHI estimates. It can be seen that there seem to be a bias in the roll of NOAA 16 of around 0.5 to 1 mrad. The pitch fluctuates a lot even during normal solar activity and it is quite large for NOAA 16 (~5-10 mrad) during this period. It is, however, important to notice that the pitch error also include other errors (orbit prediction and clock errors). ANA is now installed in a semi-operational environment at SMHI for the production of the prototype cloud and precipitation products of the Satellite Application Facility (SAF) to support Nowcasting. See www.smhi.se/saf, Dybbroe et al. (2000), Thoss et al. (2001) and Dybbroe et al. (2001) for a description of the AVHRR & AMSU/MHS based cloud and precipitation products and algorithms developed at SMHI. Future plans NOAA 16 yaw error NOAA 16 roll error NOAA 16 pitch error The preliminary results during spring summer and autumn at high latitudes are promising. However, a clear weakness of ANA is the nighttime land-sea discrimination method (also used for twilight conditions) which depends on a single Tb4-Tb5 histogram. Depending on the season, geographical area and hour in the day, this method may fail to build the land-sea mask of a viewed landmark, which reduce the number of images where the navigation can be successfully adjusted. The high-latitude winter season with little or no daylight, snow cover on the ground and sea ice along the coasts, and cold land and water surfaces, is particularly problematic. With the technique as implemented today ANA is expected to fail on a major part of the satellite passes received at SMHI Norrköping during the winter season (November-March). Therefore, a small project has been set up at SMHI with support from the Swedish National Space Board (SNSB) in order to improve on the performance of ANA in general and at high latitudes in particular. Our focus will be on trying to improve on the nighttime algorithm, making use of more image features than just the current Tb4-Tb5. Acknowledgement What is ANA? The Automatic Navigation Adjustment (ANA) technique was developed at CMS Météo-France in the 1980ties, to provide highly accurate geo-located AVHRR data. ANA combines a physical image deformation model and automatic adjustment on coastal landmarks. The navigation adjustment is done in satellite coordinates allowing interpreting the landmark navigation errors in terms of satellite attitude: yaw, pitch and roll. In short the adjustment involves the following six steps: 1) A generation of a set of coastal landmarks from the World Vector Shoreline database (obtained freely with the Generic Mapping Tools: http://gmt.soest.hawaii.edu/). Done only once for your local receiving station. 2) Landmark location: Using the physical deformation model and the nominal attitude the landmarks inside the swath are converted to binary land-sea images expressed in satellite coordinates. Each such reference window is associated with an actual window in the AVHRR image, which is centred on the calculated landmark position and fully containing the reference window. 3) Cloud mask: A cloud mask may be derived over every actual window and those that are too cloudy are rejected. This step is presently omitted at SMHI. 4) For each “cloud free” (cloud free or nealy cloud free as determined by the cloud mask, e.g. MAIA) window a binary landsea image is constructed, using AVHRR channel 1 and 2 for daytime conditions, and channel 4 and 5 at night. 5) A similarity coefficient is calculated for all possible displacements. The displacement corresponding to the maximum of the similarity coefficient gives the landmark navigation error expressed in line and pixel numbers. 6) Attitude estimation: Assuming the attitude error is constant over the whole image, it can be estimated by the rms resolution of a system involving the measured landmarks position in the image and their true latitudes and longitudes. See Bordes et al. (1992) and Brunel and Marsouin (2000) for a detailed description of ANA. The ANA software has recently been made compatible with the EUMETSAT ATOVS and AVHRR processing package, AAPP, version 3.0, which is becoming a standard also for processing AVHRR data. The software is available on request, as such, without any commitment to further maintenance. It is described in a User's Manual. Contact at CMS: pascal.brunel@meteo.fr The NOAA reception at SMHI Norrköping failed during major parts (27-30 April and 17 –31 May) of the study period discussed, due to severe problems with the antenna. But thanks to DMI, and in particular Søren Andersen who made their locally received NOAA HRPT level 0 data accessible to us we managed to keep a continuous data series for research and development. This work is part of a project sponsored by the Swedish National Space Board and SMHI. References Bordes, P., Brunel, P. and Marsouin, A., 1992: Automatic Adjustment of AVHRR Navigation. Journal of Atmospheric and Oceanic Technology, Vol. 9, No. 1, 15-27. Brunel, P. and Marsouin, A., 2000: Operational AVHRR navigation results. Int. J. of Remote Sensing, vol. 21, no. 5, 951-972. Dybbroe, A., Thoss, A. and Karlsson K.-G., 2000: The AVHRR & AMSU/MHS products of the Nowcasting SAF. Proceedings of the 2000 Eumetsat Meteorological Stallite Data Users’ Conference, Bologna, Italy, pp. 729-736. ISBN: 92-9110-037-4. Dybbroe, A., Thoss, A. and Karlsson, K.-G., 2001: Validation of Nowcasting SAF Polar platform products. Proceedings of the 2001 Eumetsat Meteorological Satellite Data Users’ Conference, October 1-5, Antalya, Turkey, pp. 344-451. ISBN: 92-9110-044-7. Thoss, A., Dybbroe, A. and Bennartz, R., 2001: The Nowcasting SAF Precipitating Clouds Product. Proceedings of the 2001 Eumetsat Meteorological Satellite Data Users’ Conference, October 1-5, Antalya, Turkey, pp. 399-406. ISBN: 92-9110-044-7.