Common functional principal component models for mortality forecasting
advertisement

Common functional principal
component models for
mortality forecasting
Rob J Hyndman and Farah Yasmeen
Outline
1 Functional time series
2 Functional time series models
3 Common functional principal components
4 Australian mortality
5 References
Common functional principal component models for mortality forecasting
Functional time series
2
Functional time series
Common functional principal component models for mortality forecasting
Functional time series
3
Functional time series
−2
−4
−6
−8
−10
Log death rate
0
2
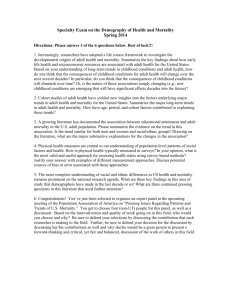
Australia: male death rates (1921−2009)
0
20
40
60
80
100
Age
Common functional principal component models for mortality forecasting
Functional time series
4
Functional time series
−2
−4
−6
−8
−10
Log death rate
0
2
Australia: female death rates (1921−2009)
0
20
40
60
80
100
Age
Common functional principal component models for mortality forecasting
Functional time series
4
Functional time series
−2
−4
−6
−8
−10
Log death rate
0
2
Australia: female death rates (1921−2009)
0
20
40
60
80
100
Age
Common functional principal component models for mortality forecasting
Functional time series
5
Functional time series
2
Australia: female death rates (1921−2009)
−8
−6
−4
−2
How to forecast future curves?
−10
Log death rate
0
Smooth data using weighted
penalized regression splines with
a partial monotonic constraint.
0
20
40
60
80
100
Age
Common functional principal component models for mortality forecasting
Functional time series
5
Functional time series
2
Australia: female death rates (1921−2009)
−8
−6
−4
−2
How to forecast future curves?
−10
Log death rate
0
Smooth data using weighted
penalized regression splines with
a partial monotonic constraint.
0
20
40
60
80
100
Age
Common functional principal component models for mortality forecasting
Functional time series
5
Outline
1 Functional time series
2 Functional time series models
3 Common functional principal components
4 Australian mortality
5 References
Common functional principal component models for mortality forecasting
Functional time series models
6
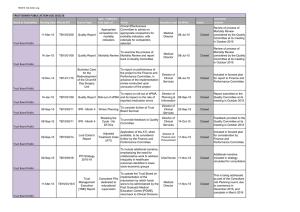
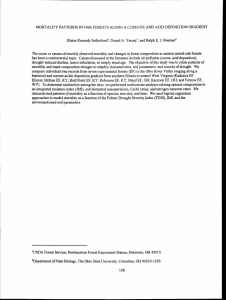
Functional time series model
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
1
2
3
4
ft,j (x) = smoothed log mortality rate for age x in
group j in year t.
Compute µj (x) as f̄j (x) across years.
Compute βt,j,k and φj,k (x) using functional
principal components.
Forecast {βt,j,k } using univariate time series
models (e.g., ETS, ARIMA, ARFIMA, . . . )
Common functional principal component models for mortality forecasting
Functional time series models
7
20 40 60 80
0.2
0.0
−0.1
φ2(x)
−0.05
−0.15
0
20 40 60 80
0
Age
20 40 60 80
0
Age
20 40 60 80
Age
1920
1960
t
2000
1920
βt3
−2
−1
0.0
−2.0
−1.0
βt2
0
−5
βt1
0
1.0
5
1
Age
Australian
male
mortality
φ3(x)
0.05
0.20
0.15
φ1(x)
0.10
0.05
0.00
0
0.1
Interaction
0.15
Main effects
−8 −7 −6 −5 −4 −3 −2 −1
µ(x)
Functional time series model
1960
2000
1920
t
Common functional principal component models for mortality forecasting
Functional time series models
1960
2000
t
8
20 40 60 80
20 40 60 80
0
1.0
βt3
−1.0 −0.5
−0.5
−1.5
βt1
0.5
0.5
5
1960
t
2000
1920
20 40 60 80
Age
1.5
10
Age
0
1920
−0.2
−0.4
0
Age
−5
Australian
female
mortality
φ3(x)
0.05
φ2(x)
−0.15
0
Age
0.0
20 40 60 80
βt2
0
−0.05
0.10
0.05
−6
φ1(x)
−4
0.15
0.0
Interaction
−2
Main effects
−8
µ(x)
Functional time series model
1960
2000
1920
t
Common functional principal component models for mortality forecasting
Functional time series models
1960
2000
t
9
The problem
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
Groups may be males and females, or states
within a country.
Expected that groups will behave similarly.
Fitting separate models to the groups leads to
divergent forecasts when the coefficients are
non-stationary.
We require “coherent” forecasts:
lim Ekft,j − ft,i k < ∞ for all i and j
t →∞
Common functional principal component models for mortality forecasting
Functional time series models
10
The problem
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
Groups may be males and females, or states
within a country.
Expected that groups will behave similarly.
Fitting separate models to the groups leads to
divergent forecasts when the coefficients are
non-stationary.
We require “coherent” forecasts:
lim Ekft,j − ft,i k < ∞ for all i and j
t →∞
Common functional principal component models for mortality forecasting
Functional time series models
10
The problem
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
Groups may be males and females, or states
within a country.
Expected that groups will behave similarly.
Fitting separate models to the groups leads to
divergent forecasts when the coefficients are
non-stationary.
We require “coherent” forecasts:
lim Ekft,j − ft,i k < ∞ for all i and j
t →∞
Common functional principal component models for mortality forecasting
Functional time series models
10
The problem
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
Groups may be males and females, or states
within a country.
Expected that groups will behave similarly.
Fitting separate models to the groups leads to
divergent forecasts when the coefficients are
non-stationary.
We require “coherent” forecasts:
lim Ekft,j − ft,i k < ∞ for all i and j
t →∞
Common functional principal component models for mortality forecasting
Functional time series models
10
The problem
ft,j (x) = µj (x) +
K
X
βt,j,k φj,k (x) + rt,j (x)
k =1
Groups may be males and females, or states
within a country.
Expected that groups will behave similarly.
Fitting separate models to the groups leads to
divergent forecasts when the coefficients are
non-stationary.
We require “coherent” forecasts:
lim Ekft,j − ft,i k < ∞ for all i and j
t →∞
Common functional principal component models for mortality forecasting
Functional time series models
10
Outline
1 Functional time series
2 Functional time series models
3 Common functional principal components
4 Australian mortality
5 References
Common functional principal component models for mortality forecasting
Common functional principal components
11
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
βt,k φk (x) +
k =1
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Coherence when {γt,j,` − γt,i,` } is stationary for
each combination of i, j and ` so that
lim Ekft,j − ft,i k < ∞
t →∞
for all i and j.
Can impose coherence by requiring either
cointegrated scores, or stationary scores.
Common functional principal component models for mortality forecasting
Common functional principal components
12
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
βt,k φk (x) +
k =1
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Coherence when {γt,j,` − γt,i,` } is stationary for
each combination of i, j and ` so that
lim Ekft,j − ft,i k < ∞
t →∞
for all i and j.
Can impose coherence by requiring either
cointegrated scores, or stationary scores.
Common functional principal component models for mortality forecasting
Common functional principal components
12
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
βt,k φk (x) +
k =1
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Coherence when {γt,j,` − γt,i,` } is stationary for
each combination of i, j and ` so that
lim Ekft,j − ft,i k < ∞
t →∞
for all i and j.
Can impose coherence by requiring either
cointegrated scores, or stationary scores.
Common functional principal component models for mortality forecasting
Common functional principal components
12
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
k =1
βt,k φk (x) +
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Model 1: PCFPC(K , 0). No idiosyncratic
principal components in the model.
Model 2: PCFPC(K , L) with a coherence
constraint. For each `, {γt,i,` − γt,j,` } is stationary
for all i, j.
Model 3: PCFPC(K , L) with a coherence
constraint. For each ` and j, {γt,`,j } is stationary.
Model 4: PCFPC(0, L). All principal components
and scores are idiosyncratic.
Common functional principal component models for mortality forecasting
Common functional principal components
13
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
k =1
βt,k φk (x) +
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Model 1: PCFPC(K , 0). No idiosyncratic
principal components in the model.
Model 2: PCFPC(K , L) with a coherence
constraint. For each `, {γt,i,` − γt,j,` } is stationary
for all i, j.
Model 3: PCFPC(K , L) with a coherence
constraint. For each ` and j, {γt,`,j } is stationary.
Model 4: PCFPC(0, L). All principal components
and scores are idiosyncratic.
Common functional principal component models for mortality forecasting
Common functional principal components
13
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
k =1
βt,k φk (x) +
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Model 1: PCFPC(K , 0). No idiosyncratic
principal components in the model.
Model 2: PCFPC(K , L) with a coherence
constraint. For each `, {γt,i,` − γt,j,` } is stationary
for all i, j.
Model 3: PCFPC(K , L) with a coherence
constraint. For each ` and j, {γt,`,j } is stationary.
Model 4: PCFPC(0, L). All principal components
and scores are idiosyncratic.
Common functional principal component models for mortality forecasting
Common functional principal components
13
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
k =1
βt,k φk (x) +
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Model 1: PCFPC(K , 0). No idiosyncratic
principal components in the model.
Model 2: PCFPC(K , L) with a coherence
constraint. For each `, {γt,i,` − γt,j,` } is stationary
for all i, j.
Model 3: PCFPC(K , L) with a coherence
constraint. For each ` and j, {γt,`,j } is stationary.
Model 4: PCFPC(0, L). All principal components
and scores are idiosyncratic.
Common functional principal component models for mortality forecasting
Common functional principal components
13
Partial Common Functional Principal Components
PCFPC(K , L) model
ft,j (x) = µj (x) +
K
X
k =1
βt,k φk (x) +
L
X
γt,j,` ψj,` (x) + εt,j (x)
`=1
Model 1: PCFPC(K , 0). No idiosyncratic
principal components in the model.
Model 2: PCFPC(K , L) with a coherence
constraint. For each `, {γt,i,` − γt,j,` } is stationary
for all i, j.
Model 3: PCFPC(K , L) with a coherence
constraint. For each ` and j, {γt,`,j } is stationary.
Model 4: PCFPC(0, L). All principal components
and scores are idiosyncratic.
Common functional principal component models for mortality forecasting
Common functional principal components
13
Outline
1 Functional time series
2 Functional time series models
3 Common functional principal components
4 Australian mortality
5 References
Common functional principal component models for mortality forecastingAustralian mortality
14
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
Data obtained from Human Mortality Database.
All data smoothed (independently for each
year) using penalized regression splines with
monotonicity constraint above age 65.
K = L = 6.
ARIMA models for common PC scores.
ARFIMA models for stationary PC scores with
0 < d < 0.5.
VECM using the Johansen procedure for
cointegrated PC scores.
Common functional principal component models for mortality forecastingAustralian mortality
15
Australian mortality
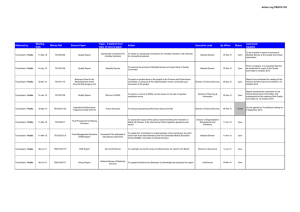
(b):Life expectancy difference:F−M
Female−PCFPC(6, 6)
Male−PCFPC(6, 6)
Female−Independent
Male−Independent
1960 1980 2000 2020 2040
Year
0
2
4
75
70
65
60
Age
80
Number of years
6
85
90
8
Life expectancy forecasts
1960
2000
2040
Year
Common functional principal component models for mortality forecastingAustralian mortality
16
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
●
●
time
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
Common functional principal component models for mortality forecastingAustralian mortality
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=1
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=2
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=3
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=4
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=5
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=6
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=7
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=8
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h=9
17
Experimental set up
Training data
●
●
●
●
●
●
●
●
●
●
●
●
Test data
●
●
●
●
●
●
●
●
●
●
●
●
●
time
Rolling forecast origin: 1969–2008,
forecasting up to 20 years ahead
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Common functional principal component models for mortality forecastingAustralian mortality
h = 10
17
Out-of-sample MSE
Forecast Groups
horizon
Model 1
Model 2
Model 3
Model 4
PCFPC(6,0)
PCFPC(6,6)
PCFPC(6,6) PCFPC(0,6)
(All common) (Cointegrated) (Stationary) (Divergent)
h=5
Combined (F & M)
Female (F)
Male (M)
2.59
2.81
2.38
2.60
2.75
2.45
2.50
2.70
2.29
2.52
2.63
2.42
h = 10
Combined (F & M)
Female(F)
Male (M)
4.57
4.67
4.48
4.66
4.43
4.89
4.60
4.63
4.57
4.65
4.23
5.06
h = 15
Combined (F & M)
Female (F)
Male(M)
7.72
7.31
8.14
8.00
6.64
9.36
7.84
7.23
8.44
8.15
6.47
9.82
h = 20
Combined (F & M)
Female (F)
Male (M)
12.97
12.26
13.69
13.56
10.41
16.70
13.35
12.08
14.63
14.10
10.35
17.86
Common functional principal component models for mortality forecastingAustralian mortality
18
Common functional PC
The best coherent model has all principal
components and scores in common. So the
models differ only in mean.
The independent models work better for female
data – due to the hump in male mortality being
captured in common components?
PCFPC model more general, so poor
performance a problem of model selection.
PCFPC used K = L = 6. May be too many? How
to do order selection?
Maybe PCFPC (cointegrated) would be better if
we had a good automated VECM procedure.
Common functional principal component models for mortality forecastingAustralian mortality
19
Common functional PC
The best coherent model has all principal
components and scores in common. So the
models differ only in mean.
The independent models work better for female
data – due to the hump in male mortality being
captured in common components?
PCFPC model more general, so poor
performance a problem of model selection.
PCFPC used K = L = 6. May be too many? How
to do order selection?
Maybe PCFPC (cointegrated) would be better if
we had a good automated VECM procedure.
Common functional principal component models for mortality forecastingAustralian mortality
19
Common functional PC
The best coherent model has all principal
components and scores in common. So the
models differ only in mean.
The independent models work better for female
data – due to the hump in male mortality being
captured in common components?
PCFPC model more general, so poor
performance a problem of model selection.
PCFPC used K = L = 6. May be too many? How
to do order selection?
Maybe PCFPC (cointegrated) would be better if
we had a good automated VECM procedure.
Common functional principal component models for mortality forecastingAustralian mortality
19
Common functional PC
The best coherent model has all principal
components and scores in common. So the
models differ only in mean.
The independent models work better for female
data – due to the hump in male mortality being
captured in common components?
PCFPC model more general, so poor
performance a problem of model selection.
PCFPC used K = L = 6. May be too many? How
to do order selection?
Maybe PCFPC (cointegrated) would be better if
we had a good automated VECM procedure.
Common functional principal component models for mortality forecastingAustralian mortality
19
Common functional PC
The best coherent model has all principal
components and scores in common. So the
models differ only in mean.
The independent models work better for female
data – due to the hump in male mortality being
captured in common components?
PCFPC model more general, so poor
performance a problem of model selection.
PCFPC used K = L = 6. May be too many? How
to do order selection?
Maybe PCFPC (cointegrated) would be better if
we had a good automated VECM procedure.
Common functional principal component models for mortality forecastingAustralian mortality
19
Outline
1 Functional time series
2 Functional time series models
3 Common functional principal components
4 Australian mortality
5 References
Common functional principal component models for mortality forecasting
References
20
Selected references
Hyndman, Booth, Yasmeen (2013). “Coherent
mortality forecasting: the product-ratio method
with functional time series models”.
Demography 50(1), 261–283.
Hyndman (2014). demography: Forecasting
mortality, fertility, migration and population
data.
cran.r-project.org/package=demography
Common functional principal component models for mortality forecasting
References
21