Types of Communication
advertisement

Types of Communication
Analog: continuous variables with noise ⇒
P{error = 0} = 0 (imperfect)
Digital:
decisions, discrete choices, quantized, noise ⇒
P{error} → 0 (usually perfect)
Message
S1, S2,…or SM
Modulator
⇒ v(t)
channel; adds
noise and distortion
M-ary
messages, where
M can be infinite
Received
message
S1, S2,…or SM
Demodulator;
hypothesize H1…HN
(chooses one)
The channel can be radio, optical, acoustic, a memory device
(recorder), or other objects of interest as in radar, sonar, lidar,
or other scientific observations.
Lec14.10-1
2/6/01
A1
Optimum Demodulator for Binary Messages
Hypothesis:
H1
Message: S1
OK
Probability
H2
a priori
ERROR
P1
S2 ERROR
vb
va
E.G.
V1
P2
v
Demodulator design
2-D
case
OK
vb
v measured
t
V2
va v ∈ V ⇒
1
" H1"
v ∈ V2 ⇒ " H2 "
Lec14.10-2
2/6/01
How to define V1,V2?
vc
A2
Optimum Demodulator for Binary Messages
v
vb
E.G.
V1
2-D
case
v measured
va
V2
vb
t
How to define V1,V2?
va v ∈ V ⇒ " H "
1
1
v ∈ V2 ⇒ " H2 "
vc
∆
Minimize Perror = Pe = P1∫ p {v S1} dv + P2 ∫ p {v S2 } dv
V2
V1
∫
replace with V
1
= P1 + ∫ ⎣⎡P2p {v S2 } − P1p {v S1}⎤⎦ dv
V1
Note:
Lec14.10-3
2/6/01
∫V1 p{v S1} dv + ∫V2 p{v S1} dv = 1
A3
Optimum Demodulator for Binary Messages
Pe = P1 + ∫ [P2p{v S2 } − P1p{v S1}] dv
V1
To minimize Perror , choose V1 ∋ P1p {v S1} > P2p {v S2 }
Very general solution ↑
[i.e., choose maximum a posteriori P (“MAP” estimate)]
Lec14.10-4
2/6/01
A4
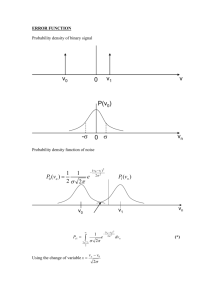
Example: Binary Scalar Signal Case
∆
∆
S1 = A volts , S2 = O volts ,
∴ p{v S1} =
p{v S 2 } =
2 2N
1
−
−
(
v
A
)
e
2πN
p{ v S 2 }
If P1 = P2 :
P2
(bias choise
toward H2 and a
priori information)
noise
1
e − v 2N
2πN
p{ v S1}
P1
0
Decision threshold if P1 = P2
Lec14.10-5
2/6/01
2∆
σn = N , Gaussian
A/2
v
A
p { v S}
P2
A/2
0
H2
P1
A
Threshold if P1 > P2
v
A5
Rule For Defining V1 : (Binary Scalar Case)
Choose V1 ∋ P1p {v S1} > P2p {v S2}
1
− v 2 2N
p {v S2} =
e
2πN
(binary case)
“Likelihood ratio”
{
}
P
A=
> 2 ⇒" V1"
p{v S2 } P1
or (equivalently)
An A > An(P2 P1) ⇒" V1"
∆ p v S1
For additive Gaussian noise,
[
]
(
An A = - (v - A )2 2N + v 2 2N = 2vA − A 2
)
?
2N > An(P2 P1)
A 2 + 2NAn (P2 P1)
A N
, or v > + A n (P2 P1)
∴ choose V1 if v >
2A
2 A Lec14.10-6
2/6/01
bias
A6
Binary Vector Signal Case
For better performance, use multiple independent samples:
v(t)
S1
?
∆ p{ v S1} P2
>
A=
p{ v S2 } P1
t
0
1 2
m
S
2
m
Here P {v1,v 2 ,...,vm S1} = p {vi S1} (independent noise samples)
π
i =1
− (v i − S1i ) 2 2N
1
e
Where p{v i Si } =
2πN
(
i =1
m
p { v Si} =
Lec14.10-7
2/6/01
(
1
2πN
)
m
e
)
− ∑ vi − S1i 2 2N
B1
Binary Vector Signal Case
m
p{ v Si } =
(
1
e
(
)
− ∑ v i − S1i 2 2N
i −1
2πN ) m
Thus the test becomes:
p {v S1} ? P2
A =
>
p {v S2} P1
∆
m
?
⎡m
P2
2
2⎤
1
An A =
vi − S2i ) − ∑ ( vi − S1i ) ⎥ > An
(
∑
⎢
2N ⎣i=1
P1
⎦
i=1
v − S2
But v − S2
2
2
v − S1
2
2
− v − S1 = −2v • S2 + 2v • S1 + S2 • S2 − S1 • S1
∗
∗
S
S
S
S
•
−
•
2
2 + N An ⎛ P2 ⎞
Therefore v ∈ V1 iff v • (S1 − S2 ) > 1 1
⎜P ⎟
2
⎝ 1⎠
Lec14.10-8
2/6/01
Bias = 0
if energy E1 = E2
Bias = 0
if P2 = P1
B2
Binary Vector Signal Case
P
V1 iff v1 • (S1 − S2 ) > S1 • S1 − S2 • S2 + N An ⎜⎛ 2 ⎞⎟
2
⎝ P1 ⎠
m
∑τ
×
S1
v
i=1
+
-
operator
H1
H2
m
∑τ
×
S2
i=1
Multiple hypothesis generalization:
?
Choose Hi if fi = v • Si − Si • Si + N An Pi > all f j≠i
2
This “matched filter” receiver minimizes Perror
∆
Lec14.10-9
2/6/01
B3
Graphical Representation of Received Signals
2
3-D Case:
Average energy = ∑ Si Pi
2
i =1
S1
V1
n
V2
0
S2
S1( t )
S13
S11
n
t
S12
Lec14.10-10
2/6/01
B4
Design of Signals Si
+1
E.G. consider
S1 = −S 2
S1 = +2
vs.
Average energy
S
2
E.G. 2-D space
for S1, S 2 , S3 , S 4 :
= E =1
-1
S2
S2
b
a
S4
n
S4
S1
S2
S1
0
decision
boundaries
Lec14.10-11
2/6/01
E = 2(P1 = P2 )
3-D space
(S1 = S11, S12 , S13 )
(S1 = S11, S12 )
S3
S2 = 0
Better
b
S3
b
ratio
a
B5
Design of Signals Si
2-D space:
S1,..., S16
Si2
19
Si1
16-ary signals
or magnitude/phase
vs
equilateral
triangle
slightly lower average
signal energy for same
p{error}
n-Dimensional sphere packing optimization unsolved
Lec14.10-12
2/6/01
B6
∆
Calculation of p{error} = Pe :
Binary case:
For additive Gaussian noise, optimum is
2
S1 − S2
" H1" if v • (S1 − S2 ) >
2
Where v = S + n
(
∆ 2
[
2
P
+ N An 2
P1
]
N = n ( t ) = NoB = kTsB No 2 W Hz - 1 × 2B, double sideband
)
2
2
⎫
⎧
S
S
−
1
2
P
⎪
⎪
Pe S1 = p⎨v • (S1 − S2 ) <
+ N An 2 ⎬
2
P1 ⎪
⎪⎩
⎭
2
⎧⎪
− S1 − S2
P2 ⎫⎪
= p ⎨n • (S1 − S2 ) <
+ N An ⎬ = p {y < −b}
2
P1
⎪⎩
⎪⎭
Lec14.10-13
2/6/01
y • 2B[GRVZM]
-b • 2B
D1
Duality of Continuous and Sampled Signals
⎫
⎧
2
⎪⎪
− S1 − S2
P2 ⎪⎪
(S1 −
Pe S1 = p⎨ n•
S2 ) <
+ N An ⎬ = p{y < −b}
P1 ⎪
2
⎪y •2B[GRVZM] ⎪⎭
⎪⎩
−b• 2B
Conversion to continuous signals assuming nyquist sampling is
helpful here, S1( t )[0 < t < T] ↔ S1 (2BT samples, sampling theorem)
∆
[
T
y = ∫ n( t ) • [S1( t ) − S2 ( t )] dt
No
WHz −1
2
noise
o
]
T
No
∆1
2
b = ∫ [S1( t ) − S2 ( t )] dt −
An(P2 P1)
2o
2
-B
0
B
f
2⎫
⎧⎡ 2BT
⎤ ⎪
⎪ 1
2∆
2
σ y = E y = E⎨⎢
n j (S1j − S2 j )⎥ ⎬
∑
⎥⎦ ⎪
⎪⎢⎣ 2B j=1
⎩
⎭
[ ]
Lec14.10-14
2/6/01
D2
Calculation of Pe, continued
2⎫
⎧⎡ 2BT
⎤ ⎪
⎪ 1
2 ∆
2
σ y = E y = E⎨⎢
n j (S1j − S2 j )⎥ ⎬
∑
⎥⎦ ⎪
⎪⎢⎣ 2B j=1
⎩
⎭
[ ]
)(
2 ⎧2BT 2BT
1
⎛ ⎞ ⎪
= ⎜ ⎟ E⎨ ∑ ∑ nin j S1i − S2i S1j − S2 j
⎝ 2B ⎠ ⎪⎩ i=1 j=1
(
)
⎫⎪
⎬
⎪⎭
where E ⎣⎡nin j ⎤⎦ = Nδij
2
T
2 No
2
2 ⎛ 1 ⎞
[
]
σ y = ⎜ ⎟ N S1 − S2 =
S
(
t
)
−
S
(
t
)
dt
1
2
∫
2 o
⎝ 2B ⎠
N oB
T
2B ∫ [S1( t ) − S 2 ( t )] dt
2
o
Lec14.10-15
2/6/01
D3
Calculation of Pe, continued
2
T
2 N
⎛ 1⎞
σ2y = ⎜ ⎟ N S1 − S2 = o ∫ [S1( t ) − S2 ( t )]2 dt
2 o
⎝ 2B ⎠
NoB
T
2B ∫ [S1( t ) − S 2 ( t )] dt
2
o
p( y ) =
1
2πσ2y
e
− y 2 2σ 2y
(GRVZM)
Therefore:
P(y)
Pe S1 =
Lec14.10-16
2/6/01
−b
∫
−∞
1
2πσ2y
e
− y 2 2σ2y
dy
-b
0
y
D4
Definition of ERFC(A)
A
∆ 1
“Error function” ERF( A ) =
∫e
π −A
−x2
dx
σ=
1
2
“Complementary error function”
∆
ERFC ( A ) = 1 - ERF(A)
x
-A A
1
Then Pe S1 = ERFC ( A ), where A must be found
2
If we let x 2 = y 2 2σ2y then
A
ERF(A) = 1 ∫ e
π −A
− x2
dx =
1
Aσ y 2
∫
2πσ2y − Aσ y 2
e
where the new limits Aσ 2 and factor 1
Lec14.10-17
2/6/01
− y 2 2σ2y
dy
2πσ2y arise as follows:
D5
Definition of ERFC(A)
A
1
ERF(A) =
e
∫
π −A
−x2
dx =
1
Aσ y 2
∫
e
− y 2σ 2y
2πσ2y − Aσ y 2
where the new limits Aσ 2 and factor 1
dy
2πσ2y arise as follows:
Since x = y σ y 2 , the limit x = A = y σ y 2
becomes a limit where y = Aσ y 2
Also, dx = dy σ y 2 so 1 π becomes 1
Lec14.10-18
2/6/01
2πσ2y
D6
Solution for Pe for Binary Signals
(
Pe S1 = 1 ERFC( A ) = 1 ERFC b σ y 2
2
2
(where the limit
)
and Pe = P1Pe S1 + P2Pe S2
b = Aσ y 2 , so A = b σ y 2 )
If P1 = P2 = 1 , and since Pe S1 = Pe S2 , then
2
(
Pe = 1 ERFC b σ y 2
2
Lec14.10-19
2/6/01
)
T
⎡
⎤
1 [S (t ) − S (t)]2 dt
⎢
⎥
1
2
∫
2
⎢
⎥
0
1
= ERFC ⎢
⎥
2
T
⎢
2 ⎥
⎢ 2 (No 2) ∫ [S1(t ) − S2 (t )] dt ⎥
⎢⎣
⎥⎦
0
D7
Solution for Pe for Binary Signals
T
⎡
⎤
2
1 [S (t) − S (t)] dt
⎢
⎥
1
2
∫
2
⎢
⎥
0
1
Pe = ERFC ⎢
⎥
2
T
⎢
2 ⎥
⎢ 2 (No 2) ∫ [S1(t ) − S2 (t )] dt ⎥
⎣
⎦
0
⎡1 T
⎤
1
2
[
]
−
Pe = ERFC ⎢
S
(
t
)
S
(
t
)
dt No ⎥
1
2
∫
2
⎢⎣ 2 0
⎥⎦
T
T
2
If ∫ S1 ( t )dt + ∫ S 2
2 ( t )dt is fixed for P1 = P2 then
0
0
T
⎛
⎞
2
To minimize Pe , let S2 ( t ) = −S1( t ) ⎜ maximizes ∫ [S1( t ) − S2 ( t )] dt ⎟
⎜
⎟
⎝
⎠
0
Lec14.10-20
2/6/01
D8
Examples of Binary Communications Systems
⎤
⎡1 T
1
2
Pe = ERFC ⎢
∫ [S1(t) − S 2 (t)] dt No ⎥
2
⎥⎦
⎢⎣ 2 0
T
1
Assume P1 = P2 = and define ∫ s12 (t)dt ∆
=E
2
0
Modulation type
s1(t)
s2(t)
Pe
“OOK”
(on-off keying)
A cos ωo t
0
“FSK”
(frequency-shift
keying)
A cos ω1t
A cos ω2 t
1 ERFC E
avg 2No
2
“BPSK”
binary phaseshift keying)
A cos ωt
− A cos ωt
1 ERFC E
avg No
2
Lec14.10-21
2/6/01
1 ERFC E 4N
o
2
= 1 ERFC Eavg 2No
2
D9
Examples of Binary Communications Systems
Note:
Pe = f (E AVG No )
[J]
[W Hz-1 = J]
Cost of communications ∝ cost of energy, Joules per bit
(e.g. very low bit rates imply very low
power transmitters, small antennas)
Lec14.10-22
2/6/01
D10
Probability of Baud Error
Pe
1
10-1
10-2
10-3
10-4
10-5
10-6
10-7
6 dB
OOK (coherent)
FSK
BPSK
FSK non-coherent
3 dB
0
4
8
12
16
20
E/No (dB)
Non-coherent FSK: carrier is unsynchronized so that both sine and
cosine terms admitted, increasing noise. Such
“envelope detectors have a different form of Pe(E/No).
Lec14.10-23
2/6/01
Note how rapidly Pe declines for E No ~
> 12 − 16 dB
D11