International Journal of Application or Innovation in Engineering & Management...
advertisement

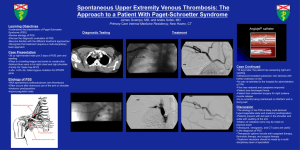
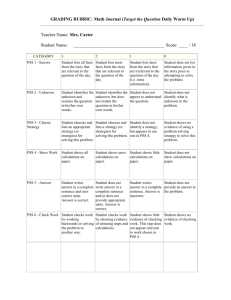
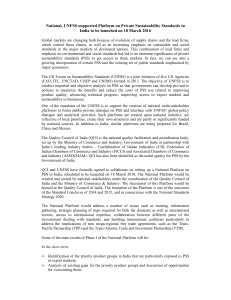
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 Coordinated Design of PSS and STATCOM based Power Oscillation Damping Controller using MOL Algorithm Sangeeta Nayak1 , Sangram Keshori Mohapatra2 1 Department of Electrical Engineering C.V. Raman College of Engineering Bhubaneswar, Odisha, India 2 Department of Electrical Engineering C.V. Raman College of Engineering Bhubaneswar, Odisha, India ABSTRACT In this paper power-system stability enhancement by simultaneous tuning of Power System Stabilizer (PSS) and Static Compensator (STATCOM) based damping controllers is thoroughly investigated. The power system stabilizer (PSS) input signal can be either speed deviation or active power Pa are considered for the proposed analysis. The design problem of the proposed controller is formulated as an optimization problem, and MOL algorithm is employed to search for the optimal controller parameters. The performance of the proposed coordinated control of based PSS with based STATCOM is based STATCOM controller under different disturbances and loading conditions based PSS with based STATCOM controller better than coordinated control of Pa based PSS with based STATCOM controller of the proposed power compared with Pa based PSS with for SMIB and multi-machine power system. It is verified that coordinated system in term of power system stability improvement. Keywords- MOL Algorithm, STATCOM, Power System Stabilizer, Multi Machine Power System 1.INTRODUCTION Power system stability and security are important factor for power system operation [1, 2]. The low frequency oscillations in the range of 0.1-2 Hz observed in large power systems and their connection, which has poor damping in a power system. The Power System Stabilizers (PSS) has been widely used for damping oscillations and increasing the stability of power system. However, PSS may not be able to provide the required damping in modern complex power systems. Generally, it is important to recognize that machine power parameters changes with loading, making the machine behavior quite different at different operating conditions. Hence, PSS should provide some degree of robustness to the variation in system parameters, loading condition and configurations. H∞ Optimization techniques have been applied to robust PSS design problem [3]. However, the order of the H∞ based stabilizer is as high as that of the plant. This gives rise to complex structure of such stabilizers which reduces their applicability. A comprehensive analysis of the effects of the different conventional PSS parameters on the dynamic performance of the power system was presented in [4]. It is shown that the conventional PSS provide satisfactory damping over a wide range of system loading conditions [5]. Although PSS provide supplementary feedback stabilizing signals, they suffer a drawback of being liable to cause great variations in the voltage profile. The recent advances in power electronic technologies have made the application of FACTS devices very popular in power systems. Most FACTS devices are installed on transmission lines far away from any generator and their purposes are mainly for reasons other than increasing the damping of low frequency oscillations. A supplementary controller may be designed for each FACTS device to increase the damping of certain electromechanical oscillatory modes (inter-area modes), while meeting the primary goal of the device. Since electronic devices are not directly involved with electromechanical oscillations and the generator signals are not available locally, the damping controller design is not as straightforward as those of the PSS. The interaction among PSS and FACTS based controllers may enhance or degrade the damping of certain modes of rotor’s oscillating modes. To improve overall system performance, many researches were made on the coordination between PSS sand FACTS power oscillation damping controllers [6-12].Also, the controllers should provide some degree of robustness to the variations loading conditions, and configurations as the machine parameters change with operating conditions. A set of controller parameters which stabilize the system under ascertain operating condition may no longer yield satisfactory results when there is a drastic change in power system operating conditions and configurations [13].The problem of PSS and FACTS controllers parameter tuning is a complex exercise as Volume 4, Issue 12, December 2015 Page 9 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 uncoordinated local control of FACTS devices and PSS may cause destabilizing interactions. In this Paper, the coordinated design of PSS and STATCOM controller is presented. The large numbers of conventional techniques have been reported in the literature pertaining to design problems of lead-lag (LL) controller structure namely the eigenvalue assignment, mathematical programming, gradient procedure for optimization, and also the modern control theory. Unfortunately, the conventional techniques are time consuming as they are iterative and require heavy computation burden and slow convergence. In addition, the search process is susceptible to be trapped in local minima, and the solution obtained may not be optimal. Many optimizing liaisons (MOL) algorithm is the simplified form of particle swarm optimization (PSO) algorithm. PSO algorithm was first developed in 1995 by Kennedy and Eberhart [14].In this paper MOL algorithm used to find out the optimal controller parameter. 2.POWER SYSTEM UNDER STUDY A.Single-Machine infinite-bus power system with PSS and STATCOM The Single-Machine Infinite-Bus (SMIB) power system with PSS and STATCOM shown in single line diagram as shown in Fig.1 is considered at the first instance in this study. The simulation model of SMIB power system with PSS and STATCOM controller are considered by taking all the relevant parameters are taken as reference [8, 9]. Generator Bus-1 I PSS VT Bus-2 T1 Bus-3 Tr. line PL PL1 VSTATCOM VB T2 Shunt FACTS Devices Load STATCOM Figure1.Single-machine infinite-bus power systems with PSS and STATCOM 3.THE PROPOSED APPROACH A.Structure of STATCOM based damping controller The structure of STATCOM based damping controller is shown in Fig.2. The STATCOM uses a lead-lag structure and acts as a controller to regulate the voltage signals VSTATCOM_ref. Each structure consists of a gain block, a signal washout block and two-stage phase compensation block and a sensor delay block. The phase characteristic to be compensated changes with the system conditions, therefore a characteristic acceptable for a range of frequencies (normally 0.1 to 2.0 Hz) is sought. This may result in less than optimum damping at any one frequency. The required phase lead can be obtained by choosing appropriate values of time constants T1S , T2 S , T3S , T4 S .The stabilizing gain K S determines the amount of damping introduced and, ideally, it should be set to a value corresponding to maximum damping. Time delays can make the less damping features. Recently there is a growing interest in designing the controllers in the presence of uncertain time delays [17]. Input signal D KS sTW 1 sTW Delay Gain Block Washout Block 1 sT1S 1 sT2S 1 sT3S 1 sT4S Two stage lead-lag Block max VSTATCOM _ ref VSTATCOM + Output + min V STATCOM __ ref VSTATCOM _ ref Figure2. Structure of STATCOM based controller Volume 4, Issue 12, December 2015 Page 10 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 B.Structure of the power system stabilizer The PSS includes an amplification block, a signal washout block, a lead-lag block. The lead-lag block provides a proper phase-lead characteristic to compensate for the phase lag between the generator electrical torque and the exciter input. The PSS input signal can be either speed deviation or active power Pa .The output signal of the PSS is the signal VS which is used as an additional input to the excitation system block. The structure of the PSS controller is presented in Fig.4. VSmax VS 1 sT1P 1 sT3 P sTWP K PS 1 sT2 P 1 sT4 P 1 sTWP Input Output min Gain VS Washout Two-stage block block lead-lag block Figure3. Structure of power system stabilizer C . Objective function The washout function the value of washout time constant is not very critical and may be in the range 1 to 20 s [14].In the present analysis, wash out time constant TW = TWP =10s are used. The gains ( K PS and K S ) and the time constants ( T1S , T2 S , T3S , T4 S , T1P , T2 P , T3P , T4P ) are to be determined in lead-lag controllers and the time constants( T1P , T2P , T3P , T4 P ) are to be determined . It is worth mentioning that the PSS and STATCOM-based controllers are designed to damp the power system oscillations after a disturbance. In the present study, an integral time absolute error of the speed deviation is taken as the objective function. The objective function is expressed as: t t sim J (1) | | t dt t 0 where, is the speed deviation and t sim is the time range of the simulation.For objective function calculation, the time-domain simulation of the power system model is carried out for the simulation period. It is aimed to minimize this objective function in order to improve the system response in terms of the settling time and overshoots. The problem constraints are the STATCOM controller parameter bounds. Therefore, the design problem can be formulated as optimization problem Minimize J (2) Subject to Ki where min Ki Ki max , Ti min Ti Ti max K imin and K imax are the lower and upper bounds of all the controllers (STATCOM and PSS) and Ti min and Ti max are the lower and upper bounds of the time constants of all the controllers. 4.OVERVIEW OF MANY OPTIMIZING LIAISONS (MOL) ALGORITHM Many optimizing liaisons (MOL) algorithm is the simplified form of particle swarm optimization (PSO) algorithm. PSO algorithm was first developed in 1995 by Kennedy and Eberhart [14]. Initially the PSO algorithm was introduced for simulating the behaviour of bird flock. Latter the PSO algorithm was simplified and applied to the individual particles (bird) which were actually involved in performing the optimization. In PSO algorithm, all the particles are placed at random position and are supposed to move randomly in a defined direction in the search space. Each particle’s direction is then changed gradually to insist to move along the direction of its best previous positions of and its peers, searching in their locality to discover even a new better position with respect to some fitness measures f : n . n Let X be the position of a particle and V be its velocity. Both the initial velocity and position of the particle are chosen randomly and updated iteratively. The formula for updating the velocity of the particle is given by [15]. V wV P RP ( P X ) G RG (G X ) (3) In the above formula w is a user defined behavioural parameter termed as inertia weight which controls the number of repetition in the velocity of particle. Volume 4, Issue 12, December 2015 P and G are the best positions of particle and swarm respectively. Page 11 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 P and G are weighted by the stochastic variables RP , RG ~ U (0,1) . P , G are the user defined behavioural parameters. Velocity is added with the current position of the particle to move to another new position in the search space. X X V (4) After updating a particle's position, limitations are imposed on the distance covered by the particle in a single step so that the particle can move from one search space to another in a single step. The steps involved in PSO algorithm are as follows [13]: a. Initialize randomly the positions and velocities of each particle. b. Update the position and velocity of each particle. c. Update the personal and global best. d. Find the velocity of a new particle using equation (3). e. Using equation (4) move the particle to a new position. f. Enforce search-space boundaries. f ( X ) f ( P) g. Update the particle’s best position, if h. The above steps are repeated for the swarm’s best position (G ) . The MOL algorithm is similar to PSO algorithm but the difference is that in MOL algorithm the particle is updated randomly where as in PSO algorithm the particle is updated iteratively over the entire swarm. This simplified version algorithm the swarm’s best position P is eliminated by of PSO is also known as Social Only PSO. In the MOL setting P =0 and the velocity update formula becomes: V w V G RG (G X ) (5) Where w is inertia weight and RG ~ U (0,1) is a stochastic variable weighted by the user defined behavioral parameter G . The particles current position is denoted by X and updated using equation (4) as before. G represents entire swarm's best known position. 5.RESULT AND DISCUSSION Here the fitness function can be obtained from time-domain simulation of power system model. Using each set of controller’s parameters, the time-domain simulation is performed and the fitness value is determined. The optimization was repeated 20 times and the best final solution among the 20 runs is chosen as proposed controller parameters. The best final solutions obtained in the 20 runs are given in Table I & Table II. TABLE I. Controller Parameters for SMIB power system with Signal/ parameters KS / K PS T1S / T2 S / T1P PSS 71.2714 based STATCOM based PSS T2 P T3S / T3 P T4 S / T4 P 1.1820 1.7718 2.3952 1.2649 15.2534 1.9747 0.5917 0.5865 1.1623 PSS 0.7451 2.2308 0.6073 0.3249 0.5634 based STATCOM 17.5013 0.7184 2.3188 0.1292 -based Pa -based Volume 4, Issue 12, December 2015 1.4821 Page 12 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 TABLE II. Loading condition considered A.Comparison of Loading condition Nominal P in pu 0.85 δ0 (deg.) Light 0.5 29.33 Heavy 1 60.3 51.51 -based STATCOM with Pa -based PSSand with -based PSS Case a: nominal loading The behaviour of the proposed controller is verified at nominal loading condition under severe disturbance condition. A 5 cycle, 3-phase fault is applied at the middle of one transmission line connecting bus 2 and bus 3, at t = 1.0 s. the fault is removed by opening the faulty line and the lines are reclosed after 5 cycles. The system response under this severe disturbance is shown in Figs. 4 and 5 where, the response without control is shown with dotted line with legend ‘no control’, the response with proposed MOL optimized Pa based PSS with based STATCOM is shown dashed line with legend case-1 and based PSS with based STATCOM is shown with solid line with legend case-2 respectively. It can be seen from Figs. 4 &5 that without control the system is highly oscillatory under the above contingency. It is also clear from Figs. 4 & 5 that the response with case-2 is better damping characteristics and enhances greatly the first swing stability compared to case-1. 0.01 (pu) 0.005 0 -0.005 no control -0.01 0 case-1 1 2 case-2 3 4 5 Time (sec) Figure 4.Speed deviation response for nominal load in case-a. 80 70 (degree) 60 50 40 30 20 no control 10 0 1 case-1 2 case-2 3 4 5 Time (sec) Figure 5. Power angle responses for nominal loading in case-a Case b: Light loading To test the robustness of the proposed controller with different disturbances and operating conditions, the generator loading changes to light loading as in Table II. A 5 cycle, 3-phase fault is applied at the nearest to bus 3 at t = 1.0 s. the fault is removed by opening the faulty line and the lines are reclosed after 5 cycles. It can be seen from Fig.6 &7 that without control the system is highly oscillatory under the above contingency. It is also clear from Fig. 6 & 7 that the response with case-2 coordinated control of STATCOM is better damping characteristics and enhances greatly the first swing stability compared to case-1 STATCOM based coordinated controller. Volume 4, Issue 12, December 2015 Page 13 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 -3 (pu) 5 x 10 0 no control case-1 case-2 -5 0 1 2 3 4 5 Time (sec) Figure 6 .Speed deviation responses for light loading in case-b 45 40 (degree) 35 30 25 20 no control case-1 15 case-2 10 0 1 2 3 4 5 Time (sec) Figure 7. Power angle responses for light loading in case-b Case c: Heavy loading To test the robustness of the controller to operating condition and fault clearing sequence, the generator loading is changed to heavy loading condition and a 5-cycle, 3-phase fault is applied at Bus2. The fault is cleared by opening both the lines. The lines are reclosed after 5-cycles and original system is restored. The system response for the above severe disturbance is shown in Figs. 8 & 9. It can be clearly seen from Figs. 8 &9 that, for the given operating condition and contingency, the system is unstable without control. Stability of the system is maintained and power system oscillations are effectively damped out with the application of case-1. The proposed coordinated controller case-2 provides the best performance and outperforms by minimizing the transient errors and quickly stabilizes the system. -3 4 x 10 no control 3 case-1 case-2 (pu) 2 1 0 -1 -2 -3 0 1 2 3 4 5 Time (sec) Figure 8. Speed deviation responses for light loading in case-c 75 no control case-1 case-2 (degree) 70 65 60 55 50 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time (sec) Figure 9. Power angle responses for light loading in case-c Volume 4, Issue 12, December 2015 Page 14 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 B.Extension to Multi-Machine power system with STATCOM with PSS From the above analysis comparison of STATCOM with Pa based PSS and based PSS in SMIB for power system stability analysis it is clear that coordinated control of based PSS with based STATCOM controller better than coordinated control of Pa based PSS with based STATCOM controller. Now for the verification and effectiveness of proposed analysis can be extended to multi machine power system consisting of 3 generators with 5 bus systems is considered. It is similar to the power system used [17, 18]. The proposed multi machine power system are divided into two subsystem connected by intertie. The improvement of power system stability the line is sectionalized and a STATCOM is shunted at bus5. The Fig.10 shows the single line diagram of the proposed test system [9].For remote input signal speed deviation of generator G1 and G3 is chosen as the control input of STATCOM based damping controller. Speed deviations ( ) and active power ( Pa ) the individual generators are chosen as the input signals for all three PSSs. BUS2 BUS4 L2 G2 BUS5 T2 BUS1 L1 L1 LOAD2 G1 L1 L1 T1 BUS3 L3 G3 LOAD1 T3 LOAD4 STATCOM LOAD3 Figure 10. Three machine power system PSS with STATCOM TABLE III. Optimized controller Parameters for multi machine power system Signal/ Parameters -based STATCOM -based PSS1 -based PSS2 -based PSS3 -based STATCOM P -based PSS1 P -based PSS2 P -based PSS3 KS / T1S / T2 S / T3S / T4 S / K PS T1P T2 P T3P T4 P 98.7935 0.4269 0.6452 0.9926 0.1859 34.2051 1.0066 2.4571 1.0061 1.5521 7.7193 0.9540 0.4037 1.8955 2.1779 17.5395 1.7142 0.7361 1.3270 2.0812 81.4726 2.2646 0.3183 2.2835 1.5813 4.8779 0.6970 1.3677 2.3938 2.4123 7.8815 2.4265 2.3930 1.2140 2.0009 7.0952 1.0550 2.2894 1.9807 2.3988 The objective functions J is defined as t t sim J ( | L | | I |) t dt (6) Where ΔωI and ΔωL are the speed deviations of inter-area and local modes of oscillations respectively and tsim is the time range of the simulation. The same approach as explained for SMIB case is followed to optimize the STATCOM Pa based PSS with based PSS damping controller parameters for three-machine case. The best among the 20 runs for both the input signals are shown in Table III. t0 Volume 4, Issue 12, December 2015 Page 15 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 Simulations results Case-1: Three phase self clearing fault: Here a 3-phase fault is applied near bus 1 at t = 1 sec and it continues for 5 cycles. In these Figs. 11 &12, the response without control is shown with dotted line with legend no control; and responses with the signals for Δω based STATCOM with Pa based PSS is shown with dashed line with legend case-1 and the same for Δω based PSS with Δω based STATCOM is shown with solid line with legend case-2 respectively. It is clear from Fig. 11 &12 that interarea and local modes of oscillations are highly oscillatory in the absence of STATCOM-based damping controller and PSS. But the proposed controller significantly improves the power system stability by damping these oscillations with both case-1 and case-2. However, case-2 based coordinated controller to be a better than case-1 based coordinated controller as the power system oscillations are quickly damped out with case-1 based coordinated controller. -3 2-3 (pu) 4 x 10 2 0 no control -2 case-1 case-2 -4 0 2 4 6 8 10 12 Time (sec) Figure 11.local mode of oscillation for three phase fault disturbance x 10 3 -3 no control 1-2 (pu) 2 case-1 case-2 1 0 -1 -2 0 2 4 6 8 10 12 Time (sec) Figure12. Inter area mode of oscillation for self clearing three phase fault disturbance Case-2- Line outage disturbance To show the robustness of the proposed approach, another disturbance is considered. The transmission line between bus 5 and bus 1 is tripped at t=1.0 sec and reclosed after 5 cycles. The system response is shown in Figs.13 & 14 from which it is clear that case-2 coordinated control to be a better choice than case-1 coordinated control for stability improvement. -3 4 x 10 2-3(pu) 2 0 no control -2 case-1 case-2 -4 0 2 4 6 8 10 12 Time (sec) Figure 13.Local mode of oscillation for line outage disturbance Volume 4, Issue 12, December 2015 Page 16 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 2 x 10 ISSN 2319 - 4847 -3 1-3 (pu) 1 0 -1 no control case-1 -2 case-2 -3 0 2 4 6 8 10 12 Time (sec) Figure14.Inter area mode of oscillation for line outage disturbance Case-3-Small disturbance For completeness, the load at bus 4 is disconnected for 100 ms and the system response is shown in Figs. 15 &16. It is clear from these Figs. that the proposed controllers are robust and damps power system oscillations even under small disturbance conditions. Further, the performance with case-2 coordinated controller to be a better choice than case-1 coordinated controller. -3 x 10 4 2-3(pu) 2 0 no control -2 case-1 case-2 -4 0 2 4 6 8 10 12 Time (sec) Figure 15.Local mode of oscillation for small disturbance -3 1-2 (pu) 2 x 10 1 0 no control -1 case-1 case-2 -2 0 2 4 6 8 10 12 Time (sec) Figure 16. Inter area mode of oscillation for small disturbance 6.CONCLUSION In this analysis, the proposed MOL optimization technique has been employed for the coordinated design of PSS with STATCOM based controllers. Two input signal based PSS and Pa based PSS are considered. Coordinated design of based PSS controller with based STATCOM controller is compared with coordinated design of Pa based PSS and based STATCOM controllers for different loading condition and disturbance. It is observed that based PSS with based STATCOM controller gives better system response than Pa based PSS with based STATCOM controllers from power system stability point of view for both SMIB and multi machine power system . References [1] Y.N. Electric power system dynamics. Academic Press,1983 [2] F. Demello, F. and C. Concordia. Concepts of synchronous machine stability as affected by Excitation control. IEEE trans.PAS, vol.88,pp.316–329,1969. [3] T.C. Yang. Applying H∞ optimization method to power system stabilizer design parts 1& 2”. Int. J. Electrical Power Energy Syst., vol.19,no.1,pp.29–43,1997. Volume 4, Issue 12, December 2015 Page 17 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 4, Issue 12, December 2015 ISSN 2319 - 4847 [4] P. Kundur, M. Klein, G.J. Rogers, and M.S. Zywno. Application of power system stabilizers for enhancement of overall system stability. IEEE Trans. on Power Systems,vol.4,pp.614–626,1989. [5] M.A. Abido, and Y.L. Abdel-Magid. Robust design of multi machine power system stabilizers using tabu search algorithm. IEE Proc. Gener. Trans. Distrib.,vol.147,no.6,pp.387–394,2000. [6] S. Panda and N.P. Padhy. Optimal location and controller design of STATCOM using particle swarm optimization. J. Franklin Inst., ,vol.345,pp.166–181,2008. [7] S.K.Mohapatra,S.Panda and P.K.Satpathy,Power system stability improvement by simultaneous tuning of PSS and SVC based damping controllers employing Differential evolution algorithm, Int.journal of electrical,electronics,science and engineering,vol.6,no.9,2012 [8] S.K.Mohapatra and S.Panda,stability improvement by SSSC and STATCOM based damping controller employing Differential Evolution algorithm,ACTA Eelectrotehnica,vo.54,no.1,2013 [9] S.K.Mohapatra,S.Panda and P.K.Satpathy.STATCOM based damping controller in power systems for enhance the power system stability,Int.journal of electrical,electronics,science and engineering,vol.7,no.2,2013. [10] S.K.Mohapatra and S.Panda, Coordinated design of power system stabilizer with FACTS based damping control by using gravitational search algorithm,Journal of Bioinformatics and intelligent control,vol.3,1-13,2014 [11] L.J. Cai and I. Erlich. Simultaneous Coordinated Tuning of PSS and FACTS Damping Controller in a Large Power System. IEEE Trans. on Power Syst.,vol.20,pp.294–300,2005. [12] S.Panda andN.P.Padhy. Power system with PSS and FACTS Controller: modeling, simulation and simultaneous tuning employing genetic algorithm. Int.J.Elec.Comp.& Sys.Engg.,vol.1,pp.9–18,2007. [13] S. Panda and N.P Padhy, Comparison of particle swarm optimization and genetic algorithm for FACTS based controller design. Appl. Soft Comput., 2008, 8:1418–1427. [14] P.Kundur,Power system stability and control,McgrawHill,New York,1994. [15] K.J.EberhartRC,Particle swarm optimization’In:Proceeding of ,IEEE Int.conference on neural network,Piscatway,NJ,p.1942-8.1995. [16] B.K.Sahu et.al.Design and comparative performance analysis of PID controlled automatic voltage regulator tuned by many optimizing liaisons,In: Proceeding of IEEE Int.Conference,APCET,2012. [17] S.Panda,N.K.Yegireddy,S.K.Mohapatra, Hybrid BFOA-PSO approach for coordinated design of PSS and SSSC based controller considering time delays,Electrical power and energy system,vol:49, pp.221-233,2013. [18] S.Panda, Multi-objective evolutionary algorithm for SSSC based controller design.Electr power System res.,vol.79,pp.937-44,2009. Volume 4, Issue 12, December 2015 Page 18