Limit Cycles
advertisement

PX391 Nonlinearity, Chaos, Complexity SUMMARY Lecture Notes 7- S C Chapman
Limit Cycles
Have found that orbits cannot cross, can be attracted to (fixed points), etc. One other possibility is
limit cycle.
ODE is 'well behaved' ie: all derivatives exist and are continuous –
Therefore, all orbits smoothly follow neighbours in phase space.
One other possibility only:
orbits approach
closed curve as
t!"
limit cycle →
NB – complete description of all details is non trivial – here give the basics.
Limit cycle – an example
F = x + y ! x( x2 + y2 )
Consider
G = !( x ! y ) ! y ( x 2 + y 2 )
Fixed point
F =G=0
is x = 0, y = 0
y = y + !y
x = x + !x
Stability analysis
F = !x + ! y
a! x + b! y
=
G = !! x + ! y
c! x + d ! y
p= a+d = 2
- unstable spiral
In addition – to look elsewhere in phase plane, rewrite in polars
x = r cos !
y = r sin !
x2 + y 2 = r 2
use following identities
x
1
dx
dy
dr
+y =r
dt
dt
dt
x
dy
dx
d!
! y = r2
dt
dt
dy
q = ad ! bc = 2
p 2 < 4q
p>0
PX391 Nonlinearity, Chaos, Complexity SUMMARY Lecture Notes 7- S C Chapman
dx
= x + y ! x( x2 + y2 )
dt
dy
= !( x ! y ) ! y ( x 2 + y 2 )
dt
then
gives
r
dr
= x 2 + xy ! x 2 ( x 2 + y 2 ) ! xy + y 2 ! y 2 ( x 2 + y 2 )
dt
= r2 ! r4
r2
ie:
"
$
$
$
$
$
$
#
d!
= !x 2 + yx ! xy(x 2 + y 2 ) ! xy ! y 2 + xy(x 2 + y 2 )
dt
= !r 2
dr
= r (1 ! r 2 )
dt
d!
= !1
dt
Integrate directly –
! = !0 ! t
" 2
Ae2t
$r =
$#
1 + Ae2t
%
'
'&
don't need to integrate r equation to see the limit cycle.
dr
=0
dt
r =1
for any !
(as well as r = 0 the fixed point)
trajectory sits on circle r = 1 .
For
r > 1 r (1 ! r 2 ) < 0
r < 1 r (1 ! r 2 ) < 0
by inspection.
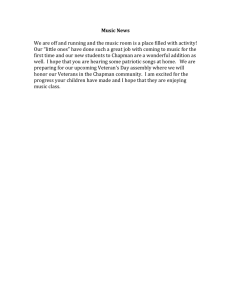
Therefore, solution is attracted to r = 1 circle.
y
either attracted in from r ! "
or out from repulsive fixed
point at r = 0 ( x = 0, y = 0 )
r =1
x
No single cast iron method to find limit cycles – see course texts for some advanced methods.
2
PX391 Nonlinearity, Chaos, Complexity SUMMARY Lecture Notes 7- S C Chapman
Example of limit cycle – Van der Pol oscillator
Van der Pol, 1926 – Electric circuit with valve (model of heatbeat)
Identical to Rayleigh, 1883 – Nonlinear Vibrations
1st experimentally shown limit cycle
d 2x
dx
+ ! ( x 2 ! 1) + x = 0
2
dt
dt
cause of trouble
Write as
dx
=y
dt
dy
= !x ! ! ( x 2 !1) y
dt
If ! = 0 ! linear pendulum ! = 1 .
Symmetries – invariant for ! ! "t; ! ! "!
Therefore, solve for ! > 0
- reverse time for ! < 0
ie: ! > 0 growth is ! < 0 damping, etc.
Fixed points
x = 0,
Stability
y=0
x = x + !x
y = y + !y
d!x
= !y
dt
F=
dx
=y
dt
G=
dy
= ! x ! ! ( x 2 ! 1) y
dt
or work out
!F
!F
=0
=1
!x
!y
3
!G
!G
= "1" 2!x
= "! ( x 2 "1)
!x
!y
d! y
= !!x + "! y
dt
PX391 Nonlinearity, Chaos, Complexity SUMMARY Lecture Notes 7- S C Chapman
!F
=0
!x
Evaluate at x , y = 0
!F
!G
!G
=1
= "1
=!
!y
!x
!y
then
p=
!F !G
+
=!
!x
!y
q=
!F !G !F !G
"
#
=1
!x !y !y !x
!>0
p>0
q>0
unstable and spiral if p 2 < 4q .
Guess there is more ….
Since damping term is ! ( x 2 ! 1)
this is +ve for large x
changes sign as x ! 1
is zero at x = 1 !
(damping)
(growth)
(neither!)
Solve – multiple timescale analysis (Rowlands, appendix)
- method of averaging (Drazin, p 193) - handout for result
Pendulum by formula
We have
d!
= 0 "! + 1." y # F
dt
dy
n
= $% 2 ( $1 ) "! + 0" y # G
dt
# 0
J =%
n
%$ !" 2 ( !1 )
dy
n
= 0 ! y " # 2 ( "1 ) !$
dt
d$
= 1.! y + 0 !$
dt
# 0 !" 2 !1 n
( )
J =%
%$ 1 0
1 &
(
0 ('
or
!
J = ## a b
#" c d
$&
&&
&%
- same thing since
F = a!x + b! y
G = c!x + d! y
p= a+d =0
q = ad ! bc = " 2 ( !1 )
So, for n even q > 0 centre,
4
n
n odd q < 0 saddle (see handout)
&
(
('