Model Coupling and Applications
advertisement

Model Coupling and Applications
Research Study Group Project Report
Oliver Dunbar, Yulong Lu, Luke Williams
Supervised by Andreas Dedner, Christoph Ortner
Contents
1 Introduction
1.1 Motivation . . . . . . . . . . . . . . . . . . . .
1.2 Mathematical Modeling . . . . . . . . . . . . .
1.2.1 Atomistic Model . . . . . . . . . . . . .
1.2.2 Atomistic-to-Continuum Model . . . . .
1.2.3 Linear Elasticity Model . . . . . . . . .
1.2.4 Atom-Nonlinear-Linear Coupling Model
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
3
4
6
7
2 Error Analysis
2.1 Variational Problem . . . . . . . . . . . . . . . . . . . . .
2.2 Error Framework . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 A Priori Error Estimate . . . . . . . . . . . . . . .
2.2.2 Error Estimates and Decay Rates: Pure Atomistic
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
8
9
3 Consistency Analysis
3.1 Atomistic and GRAC Variations . . . . . . .
3.2 Nonlinear Continuum . . . . . . . . . . . . .
3.3 Modelling Consistency Errors . . . . . . . . .
3.3.1 Atomistic Consistency Error . . . . .
3.3.2 Interior Continuum Consistency Error
3.4 Coupling Consistency Errors . . . . . . . . .
3.4.1 Atomistic-Continuum Coupling . . . .
3.4.2 Atomisitic-Nonlinear-Linear Coupling
3.4.3 Atomistic-Linearisation Coupling . . .
3.5 Remark on Other Defects . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
11
12
12
12
13
13
14
15
17
. . . .
. . . .
. . . .
Model
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
18
18
18
19
20
21
21
21
5 Numerical Results
5.1 Atom-FEM Couplings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Atom-BEM Coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
23
24
6 Further Work
25
4 Implementation
4.1 Implementing the Models . . . . . . . .
4.1.1 Atomistic Model . . . . . . . . .
4.1.2 Cauchy Born Model . . . . . . .
4.1.3 Linearisation of the Cauchy Born
4.2 Implementing the Coupling Methods . .
4.2.1 Atom-FEM . . . . . . . . . . . .
4.2.2 Atom-BEM . . . . . . . . . . . .
1
1
1.1
Introduction
Motivation
Material science, investigating the relationship between the structure of materials at atomic or molecular
scales and their macroscopic properties, has driven the development of modern science and technology.
Due to the difficulty of observing material phenomena in very small scale (generally nano-scale), it may be
impossible to study them through physical experiments. Instead, computational material science comes
out by employing numerical simulation to predict the properties of materials. Traditional computational
framework in material simulation has been the continuum physical model, where the behaviour or structure
of materials is usually characterized by solutions of partial differential equations (PDEs).
However, materials are ultimately comprised of discrete particles, this is an essential feature that had
to be included in the material description. For example, crystal defects (see Figure 1) such as grain
boundaries, cracks or dislocations requires that the atomistic structure of the defects to be correctly
modeled. The fact that real materials are not perfect crystals is critical to materials engineering. If
materials were perfect crystals then their properties would be dictated by their composition and crystal
structure alone, and would be very restricted in their values and their variety. Yet, it is the possibility
of making imperfectly crystalline materials that permits materials scientists to tailor material properties
into the diverse combinations that modern engineering devices require. The most important features of
the microstructure of an engineering material are the crystalline defects that are manipulated to control
its behavior.
(a) Point defects
(b) Edge dislocations
(c) Crack
Figure 1: Different defects
The primary step to simulation of crystal defects is to model the physical process in mathematics. It
is impossible, however, to use only atomistic models to simulate all material properties because of the
sheer number of atoms that would be required for such a simulation. Fortunately, since defects occupy
only a small proportion of bulk crystals, it is more advisable to model the elastic field using more efficient
continuum models wherever they are reasonable to apply. Much research has already occurred in the
field of coupling the atomistic model around a defect to a continuum model further away (so called ‘a/c
coupling’). We however notice an important distinction in this field: the continuum elasticity models,
according to the strength of deformation, can be divided into two classes: nonlinear elasticity model and
linear elasticity model.
This project is devoted to propose an optimized coupling mechanism between not only atomistic and
continuum, but rather between the (now distinct) atomistic and nonlinear continuum, or atomistic and
linear elastic continuum. We also may further consider even a full atomistic/nonlinear/linear coupling.
The distinction should provide many benefits in accuracy and efficiency as linear theories are prolific
areas of research and a there are often many strong methods that may only be applied to linear elastic
2
equations (many more so than the nonlinear field), so our crystal defects may be simulated more effectively. Also, computationally we are of course seeking more efficient models, and linear models are the
least computationally complex models you could consider, thus coupling should provide a more efficient
implementation.
1.2
Mathematical Modeling
Many mathematicians and engineers are researching the development of atomistic-to-continuum coupling
(a/c coupling) mechanisms to gain insight to material science problems accurately and efficiently. In this
subsection, we firstly provide a brief overview of atomistic models and its continuum approximations.
1.2.1
Atomistic Model
We begin by defining some notation. Consider a two dimensional Bravais lattice given by Λ = AZ2 .
For simplicity we take the square lattice, so that A = Id. We then add a defect, an alteration of Z2 .
This generates a reference lattice for our new, imperfect crystal denoted Λ. We assume that outside a
core region Λdef ⊂ Λ, Λ is identical to the Bravais lattice. We assume this core region is a bounded set,
centered on 0 where possible. To fully specify an atomistic system we need both the lattice structure,
and the lattice interactions- how atoms in the lattice will affect each other.
We denote a deformation of the lattice Λ by a map y : Λ → Rm , with m = 1 or 2 depending on the
types of defects. A simple example is a homogeneous deformation of Λ, given by yB (x) = Bx, x ∈ Λ with
some B ∈ Rm×2 . For ` ∈ Λ, we denote its neighbourhood by the set N` := {`0 ∈ Λ : |`0 − `| ≤ rcut }.
We allow the atoms inside some cut-off radius rcut to interact, and denote an atom’s interaction set by
N∗ (`) := N` \ {`}.
We denote the set of differences R` := {`0 − `|`0 ∈ N∗ (`)}. With this, given v : Λ → Rm , ` ∈ Λ, ρ ∈
R` := (Λ − `) \ {0}, we define the finite difference operators and finite difference stencil
Dρ v(`) := v(` + ρ) − v(`) and Dv(`) := (Dρ v(`))ρ∈R` .
Using this notation we will show how to model defects in a later section. We now give examples of
atomistic interactions. To describe these we assume each lattice site ` is given a potential V` . As our goal
is for the atoms to move off their reference positions into a lower energy configuration, our potential must
take values from a a different set. More precisely, we take dom(V` ) → R with dom(V` ) ⊂ (Rm )R` . Then
for a given deformation y, we can define the site energy the deformation possesses by Φ` (y) := V` (Dy(`)).
The explicit form of Φ` is usually chosen by physical considerations.
We must endow the space of displacements with a norm in order to do our analysis. We choose the
following, as in [14]. The discrete energy norm of u is defined by
1/2
X X |Dρ u(`)|2
:=
|ρ|2
kukW˙ 1,2 := kDuk`2
`∈Λ ρ∈R(`)
which is actually a discrete H 1 semi-norm. The associated discrete function space is give by
W˙ 1,2 := {u : Λ → R2 : kukW˙ 1,2 < +∞}.
Moreover, we assume that there is a regular partition TΛ of R2 into triangles whose nodes lie on
reference lattice sites. Moreover assume it is homogeneous in R2 \ Λdef , i.e. if T ∈ TΛ and ρ ∈ Z2 with
T, ρ + T ⊂ R2 \ Λdef , then ρ + T ∈ TΛ . For u : Λ → Rm we denote its piecewise interpolant with respect
to TΛ by Iu. Then the gradient can be defined piecewise as ∇u := ∇Iu, and we may use the L2 gradient
norm on this triangulation. The discrete norm above and the norm ∇·L2 are equivalent under the above
assumptions.
3
Now the above is in place we may state our problem. For a deformation y and a far-field configuration
z such that y − z ∈ W˙ 1,2 and Dy, Dz ∈ dom(V` ), our goal is to find the atomistic configuration that
minimises the total energy of the system. As such a problem is ill-posed on an infinite lattice, taking the
energy difference functional
X
E(y, z) :=
(Φ` (y) − Φ` (z))
`∈Λ
instead leads to a well defined object [14]. Given a proper deformation y0 (the precise conditions can be
found in [14]), prescribing the far field boundary condition (or a predictor), we define an energy difference
functional of displacement u
E a (u) := E(y0 + u; y0 )
for u lies in the admissible deformations set
dom(E a ) := {u ∈ W˙ 1,2 : Dy0 (`) + Du(`) ∈ dom(V` ) for all ` ∈ Λ}
In general, y0 is an asymptotic equilibrium (i.e. the internal forces acting on y0 tend to zero sufficiently
rapidly at infinity). For example, for point defects, y0 (x) = Bx with B ∈ SL(2). The predictor for other
defects will be presented later in the proposal.
The atomistic problem can be formulated as the following variational problem
Find ua ∈ arg min {E a (u) | u ∈ dom(E a )}
(1)
where ‘arg min’ means to find local minimizers.
1.2.2
Atomistic-to-Continuum Model
Due to the large number of atoms, it is computationally inefficient to solve the atomistic problem (1).
However, since the defects only occupy a small part of the lattice, the deformation is relatively ‘smooth’
outside the defect region. Because of this, most of the lattice can be more efficiently modelled by using
continuum elasticity, and then be coupled to the atomistic part of the system. The key constituent is the
Cauchy-Born model [2]. This is a way to approximate the atomistic potential in terms of nonlinear elasticity theory. Consider the lattice Z2 with site potential V : (R2 )Rhom → R ∪ {+∞}. Take a homogeneous
deformation R2 y : R2 → Rm , y(x) = F x for some F ∈ Rm×2 . That is we take a macroscopic, continuum
deformation.
If we now consider y as describing an atomistic configuration, then the energy per unit undeformed
volume in the deformed configuration y is by the Cauchy-Born rule
W (F ) := V (F · Rhom ).
That is, the stored energy per unit volume under a macroscopically homogeneous deformation equals
the energy per unit volume in the corresponding homogeneous crystal. This is exactly the atomistic energy
for a homogeneous lattice deformation.
We then use this idea to give an approximation for heterogeneous deformations. Of course this requires
justification, and a much more detailed exposition is found in [26]. Roughly speaking, if y, y0 : R2 → Rm
are both ‘smooth’ (i.e. |∇2 y(x)|, |∇2 y0 (x)| 1), then
Z
(W (∇y) − W (∇y0 )) dx
R2
is a good approximation to the atomistic energy difference E(y; y0 ). Since the deformation is not smooth
near the defects, one can not apply the Cauchy-Born approximation in the whole lattice at. This further
demonstrates the necessity of needing atomistic simulation to acquire sensible results. In fact the Cauchy
Born rule is often obtained in a limiting procedure of the discrete lattice [26] that destroys the characteristic
4
spacing of atoms the atomistic model possesses. This the source of many spurious results if it is not applied
carefully (see [2]).
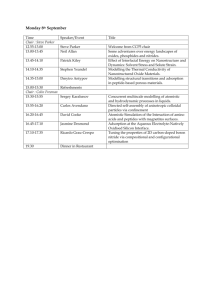
The idea of atomistic-continuum coupling is to decompose the (bounded) computational domain Ω =
a
Ω ∪ Ωc (see Figure 2), with atomistic region Ωa containing defects Λdef where the atomistic model is
applied and continuum region Ωc where we can employ Cauchy-Born model as the elastic field varies
slowly.
Figure 2: Atomistic-to-continuum coupling for point defect
Let Th be a regular partition of Ω and Ih be the associated nodal interpolation operator. We decompose
the set Λa,i := Λ ∩ Ωa = Λa ∪ Λi into a core atomistic region Λa and an interface region Λi . Define the
space of coarse-grained displacement maps for a/c coupling
Whac := {uh : Th → R | uh is continuous and p.w. affine w.r.t Th , and uh = 0 on ∂Ω}.
Here we impose an artificial Dirichlet boundary condition on ∂Ω to cut the infinite lattice into a bounded
computational domain, and we shall see how to avoid this truncation in the next section.
We define the Cauchy-Born strain energy function
W (F ) := |vol(`)|−1 Φ` (F · R(`))
where vol(`) denotes the Voronoi cell associated with lattice site `.
The final ingredient in this coupling method is known as GRAC (geometric reconstruction atomistic
continuum) introduced in [15]. This method is based on the interface between the continuum and atomistic regions because the nearest neighbour interaction difference stencil limits the communication between
the atomistic and continuum regions down to modifying the potentials on the interface boundary. Further
field interactions require more modifications to ‘near boundary’ layers of atoms in Λa .
The method is required due to the imbalance of forces that is demonstrated in Figure 3, known as
Ghost forces these are one of the primary sources of error in energy based atomistic-continuum coupling
methods. The solution proposed with GRAC is to modify the potential on the interface nodes Λi . Firstly
the atoms are given a effective volume, this is based on the proportion of the atomistic energy contribution
relative to the continuum energy contribution outside the atomistic domain in the voronoi cell of the atom.
In a square domain for example this will have value 21 on and edge, 14 for a corner.
Secondly we modify the site energy functional on Λi (recall our atomistic domain Λa,i = Λa ∪ Λi
interior and interface subdomains of our lattice), such that it gives a natural value to the ‘missing’ gray
differences seen in Figure 3
Φi` (y) := V (D̃1 y(`), D̃2 y(`), D̃3 y(`), D̃4 y(`))
5
Figure 3: GRAC reflection (in gray) and corresponding voronoi cell weighting (shaded)
where D̃i depends on the edge or corner that ` lies on. For example, for the northeast conner, D̃1 =
−D3 , D̃2 = −D4 , D̃3 = D3 , D̃4 = D4 and for sites on the upper inner edge, D̃1 = D1 , D̃2 = −D4 , D̃3 =
D3 , D̃4 = D4 . Thus we define the GRAC energy:
(
1
X
if ` is an edge atom
E GRAC (y; z) =
wli (Φi` (y) − Φi` (z))
where wli = 21
if ` is a corner atom
4
`∈Λi
and for convenience, with a predictor y0 we define E GRAC (u) := E GRAC (y0 + u; y0 ). Overall we have the
a/c energy difference functional:
E ac (u) := E ac (y; y0 ) = E a (y; y0 ) + E GRAC (y; y0 ) + E c (y; y0 )
X
X
E a (y; y0 ) :=
Φ` (y) −
Φ` (y0 ),
`∈Λa
E c (y; y0 ) :=
Z
with
`∈Λa
W (∇(Ih y)) − W (∇(Ih y0 )) dx
Ωc ∩T
=
h
X X
X X
|vol(`) ∩ T | W (∇(Ih y)|T ) −
|vol(`) ∩ T | W (∇(Ih y0 )|T )
`∈Ωc T ∈Th
`∈Ωc T ∈Th
Then the a/c coupling problem seeks to find
uac ∈ arg min {E ac (u) | u ∈ Whac }
1.2.3
Linear Elasticity Model
We can further simplify our model by linearizing elasticiy in an appropriate region. The idea is that far
enough away from a defect, the elastic response of a crystal is effectively linear and we may then employ
classical linear elasticity as a valid approximation. The linear elasticity model itself is only valid under
small deformation, and is ruled out as a model that can be directly coupled to atomistics. A way to
obtain the desired form of linear elasticity is as follows, from [14]. As what follows requires many indices,
we employ the indicial summation convention. Let F0 ∈ Rm×2 be a reference strain, then we linearise the
Cauchy Born energy
1
W (F0 + G) ≈ W (F0 ) + ∂Fiα W (F0 )Giα + ∂Fiα Fjβ W (F0 )Giα Gjβ
2
If denote the fourth order tensor Ajβ
iα := ∂Fiα Fjβ W (F0 ), then for a small displacement u, we obtain
the linearised energy difference functional :
Z
1
E l (u) =
Ajβ ∇α ui ∇β uj dx
2 R2 iα
6
In particular, in this paper we are concerned with 1D motion in an antiplane fashion, (i.e displacements
occur perpendicular to the atomistic lattice). Under this assumption, which implies F0 = 0 here, and the
homogeneous potential V uses nearest neighbour interactions, the linearised energy difference functional
becomes
Z
µ
l
|∇u|2 dx,
E (u) =
2 R2
whose minimizer u satisfies the simple Laplace equation. The constant µ is the standard shear modulus
of the bulk material.
1.2.4
Atom-Nonlinear-Linear Coupling Model
As the continuum models are fundamentally defined on local regions, there is no issue with coupling linear
continuum domains to nonlinear continuum domain. We mark the distinction nonlinear continuum and
linear continuum domains by Ωc = Ωn ∪ Ωl . Similarly we naturally define the restriction E n (u) := E c (u)
where u ∈ Whan
Whan := {uh : Th → R | uh is continuous and p.w. affine w.r.t Th , and uh = 0 on ∂(Ωa ∪ Ωn )}.
analogously we may define Whanl , then the a/n/l energy difference functional is given by:
E anl (u) = E a (u) + E GRAC (u) + E n (u) + E l (u)
And the a/n/l/ coupling problem is
uanl ∈ arg min {E anl (u) | u ∈ Whanl }
2
Error Analysis
Once a mathematical framework for a problem has been developed, many further steps must be taken
to accurately and consistently link it to the “real world”: a way to study models and produce concrete
results using computational methods. In doing so, practical considerations must be taken into account.
In this project, we have implemented a model problem derived from the mathematical framework found
in [14]. As mentioned in the introduction, to make these problems numerically tractable approximations
must be used. We now detail the various errors incurred when attempting to learn about the exact
solution to the problem, and how these errors can be balanced so that one error is not significantly larger
than the others. For obvious reasons, this ensures the model produces a consistent approximation.
2.1
Variational Problem
Recall our problem is to find minimisers for the energy functional in the closure of W˙ 1,2 under the
appropriate energy norm. That is, we wish to find
ua ∈ arg min {E a (u) | u ∈ W˙ 1,2 }
The variational form of this problem is extremely useful. To make this precise we define the first and
second variation of the energy functional by
hδE a (u), vi :=
d a
E (u + tv)|t=0
dt
hδ 2 E a (u)v, wi :=
and
d
hδE a (u + tv), wi|t=0
dt
We require that a minimiser satisfies the following two conditions:
hδE a (u), vi = 0
and
∃γ > 0, s.t. hδ 2 E a (u)v, vi ≥ γkvk2 ∀v ∈ W˙ 1,2
7
(2)
The first term comes directly from the Euler Lagrange equation. The second condition is called
stability of the solution: In this project we assume that this condition is satisfied.
u : hδE(u), vi = hf, vi ∀v ∈ W˙ 1,2
Note that in general we will only find local minimisers.
For complicated problems it is impossible to calculate a minimiser analytically, and infeasible to apply naı̈ve computational tools to approximate it to a reasonable accuracy. To deal with these issues, we
introduce and analyse the following models to overcome this.
2.2
Error Framework
Our problem is now to find
Find u ∈ arg min{E model (v) | v ∈ Whmodel }
with appropriate functions spaces and in an appropriate norm. In order for a model to be a “good”
approximation it must be both stable and consistent. Here the consistency condition is expressed by
hE a (u) − E ac (u), vi ≤ γcons ||v||,
where γcons is a small constant. Coupled with the (assumed) stability of a model, this will yield an a
priori error estimate.
2.2.1
A Priori Error Estimate
If we assume that Ih ua and uac are close in the infinity norm, then looking at the error eh = Ih ua − uac
and the second variation yields by stability
2
Z
2 ac
1
γstab ||eh || ≤ hδ E (uac )eh , eh i ≈ h
δ 2 E ac (uac + teh )eh dt, eh i
0
Z 1
=h
δE ac (Ih u) − δE ac (uac ), eh i ≤ γcons ||eh ||,
0
and so
||eh || ≤
γcons
+δ
γstab
where this δ comes from the first approximation, and can be sufficiently controlled by applying the
Inverse Function Theorem as in [23]. With the above derived (at least formally), we wish specifically to
determine rates of the convergence - we will find consistency errors in terms of the differences of u in an
appropriate norm as follows:
Show ∃C > 0, k > 0 s.t hδE a (u) − δE model (u), vi ≤ Ck∇k1 ukk2
where k1 , k2 will describe the rate of convergence if the strong stability given by (2) is assumed of the
system.
We will now introduce and analyse a series of models, and later provide numerical tests to demonstrate
the rates obtained.
8
2.2.2
Error Estimates and Decay Rates: Pure Atomistic
Our first step will be to acquire error estimates between an energy minimiser ū and a Galerkin approximation, again following [14]. Defining the space
W0 (Ω) = {u : Ω → R|u(`) = 0∀` ∈ Ωc }
then W0 = W˙ 1,2 , with the closure taken under the norm defined in the introduction. We have the
following result from [14]:
Let ū be the exact solution to the problem formulated above. Then denoting ūc as the solution to the
problem
ūc ∈ argmin{E(u) : u ∈ W0 (Ω)}
(3)
We have the following:
Theorem 2.1. Let (Ω)R be a sequence of computational domains such that Λ ∩ B(0, R) ⊂ ΩR . if ū is a
strongly stable solution, then for all sufficiently large R there exists a strongly stable solution to (3) such
that
kū − ūc k ≤ CR−1 , 0 ≤ E(ū) − E(ūc ) ≤ CR−2 .
We may use this to find approximations to the exact solution. Our goal is to reduce computational
complexity by introducing a continuum analogue of (3), and coupling it to an atomistic description to
improve its accuracy. In doing so, we must ensure the error still has the same or better asymptotic
behaviour (or else we have chosen a poor model).
3
Consistency Analysis
We now introduce the framework for different consistent coupling schemes, and demonstrate the errors
incurred in doing so.
The idea is that in a small region where forces are large, we will use an atomistic description. Further
out (at a radius chosen by considering the analysis) we will replace the atoms with a continuum, with the
atomistic part of the problem providing boundary conditions. Once this is done, we will demonstrate how
to optimise the coupling: that is, determine the sizes of the regions of the lattice that will be subject to
different models so that each model contributes the same order of error. One difficulty is that the potential
given to each atom relies on atomistic positions of its neighbours, and of course on the interface with the
continuum region an atom will have no neighbours on one “side”. Many methods have been introduced
to surmount this difficulty. We describe a particular method which achieves the desired consistency.
In our atomistic continuum coupling, if we investigate a defect with no bulk forces, we can confine
these to the atomistic interior to make the implementation and analysis less involved. We can decompose
R2 into two open sets Ωa and Ωc . This will yield convergence rates for the error. We now introduce the
framework for different consistent coupling schemes, and demonstrate the errors incurred in doing so.
To model the continuum we will employ the Cauchy Born rule or its linearised variant, and implement
this using the finite element method. We will firstly analyse the atomistic part of our coupled problem.
3.1
Atomistic and GRAC Variations
We wish to inspect the variations of the the coupling firstly between atomistic and (possibly nonlinear)
continuum (linearisation discussed in §3.4.2). The variation of the atomistic-continuum energy is given
by:
ac
hδE ac (u), vi = hδE a (u), vi + hδE GRAC (u), vi + hδE c (u), vi, ∀v ∈ W˙h
9
Firstly, we wish to write these variations all in the same form, we choose this to be formulated as bond
densities, hence we define the set of edges in the atomistic lattice Λ as E . Then, we P
calculate for suitable
test function v: (recalling the symmetry of our potential defined as V ({Di u}4i=1 ) = 4i=1 f (Di u) )
X d
d a
a
hδE (u), vi =
E (u + tv)|t=0 =
Φ` (u + tv)
dt
dt
t=0
`∈Λa
X
X
0
0
f (De u) · De v
=
V (Du) · Dv = 2
`∈Λa
e∈E
where the final summation now takes place over the set of edges in the atomistic lattice E , thus we have
written this variation as a sum over bond weights.
For the boundary atoms (thus boundary bonds), we have two different cases due to the modified
potential and weights.
• Edge atom - Example: p4 is imaginary atom
We show that the weighting of the variation on the boundary edges are a half that of the interior
edges, and that the weighting to the interior bond is the same as in the interior atomistic case (i.e
these bonds remain unaffected by the GRAC coupling. (Notation: Di represents the finite difference
from the centre atom to pi )
p4
p1
1
2
1
2
p2
1
p3
1
i
wedge
hδΦiedge (u), vi = hδV (D1 u, D2 u, D3 u, −D2 u), vi
2
!
3
1 X 0
0
f (Dk u)Dk v − f (−D2 u)D2 v
=
2
k=1
1
1
= f 0 (D1 u)D1 v + f 0 (D3 u)D3 v + f 0 (D2 u)D2 v
2
2
Thus we can see that the contribution for bonds either side of an edge atom in the energy variation
will only alter the weight of bonds on the boundary.
• Corner atom - Example: p1 , p4 are imaginary atoms
Now we know that the edge atoms have the same contributions to the variation, we wish to confirm
that the corner atoms with two reflections are still consistent with this.
p4
1
2
p1
1
p2 2
p3
1
i
wvert
hδΦivert (u), vi = hδV (−D3 u, D2 u, D3 u, −D2 u), vi
4
!
3
1 X 0
=
f (Dk u)Dk v − f 0 (−D3 u)D3 v − f 0 (−D2 u)D2 v
4
k=3
1
1
= f 0 (D2 u)D2 v + f 0 (D3 u)D3 v
2
2
Hence we have the correct weights that correspond to the diagram.
We now may write this over all bonds, we obtain the form (E i the set of all bonds in the boundary
layer):
X
hδE GRAC (u), vi =
f 0 (De u) · De v,
e∈E i
where we multiply by two due to undercounting.
10
3.2
Nonlinear Continuum
We begin considering if or how we can write the continuum variation in the following form:
?
hδE ac (u), vi =
X
ηeac De v
e∈Ωc
To accomplish this, we use Q1 finite elements. We assume the radius of the atomistic region is
approximately R. We then write out the above for the continuum region:
Z
∇W (∇u) · ∇v =
Ωc
X Z
Q
Q∈Ωc
=
∇W (∇u) · ∇v −
X Z
X
Q∈Ωc
(∇W (∇u) − ∇W (FQ )) · ∇v +
Q
Q∈Ωc
X
[∇W (FQ )] · ∇v +
X
Z
≤ R−3 ||∇v||L2 +
Q∈Ωc
·∇v
∇W (FQ )
Q
X Z
[∇W (FQ )] · ∇v
Q∈Ωc
Q
∇W (FQ ) · ∇v,
Q
Here FQ is chosen by taking the average gradient on each element. This allows us to use Poincaré’s
inequality on the left hand term, and use the right hand term in calculating the consistency error. We
have that
X
||∇W (∇u) − ∇W (h∇ui)||L2 (Ωc ) .
||∇u − h∇ui||L2 (Q) + ||(∇u − h∇ui)2 ||L2 (Q) . R−3 .
Q
Proceeding with writing the continuum variation in terms of edges, we begin by noting that
Z
Z
∇W (F ) · ∇v =
Q
(∇W (F )) · nv dl,
∂Q
where n denotes the outward normal on ∂Q, and dl denotes the integral over the edges. We have that
∇W (F ) = (∂1 W (F1 , F2 ), ∂2 W (F1 , F2 )),
and recalling the Cauchy Born rule, this is just given by
∂1 W = 2∂1 V (F1 , F2 , −F1 , −F2 ) = 2f 0 (F1 ),
and similarly for the other component. We now take the inner product with the outward normal to each
edge- this allows us to write (the subscripts refer to the normal on edge i)
∇W (F ) · n1 = 2f 0 (F2 ), ∇W (F ) · n3 = −2f 0 (F2 ),
and similarly for the other two parallel edges. Collecting all this, we can write the variation as a sum over
all edges
Z
Z
−f 0 (F2 )
v dl1 + f 0 (F2 )
∂Q
v dl3 = f 0 (F2 )(v(x3 ) − v(x4 ) + v(x2 ) − v(x1 )).
∂Q
as the trapezoidal rule is exact for affine functions. A similar calculation is applied to the other edges.
Combining the above we have
X
e∈Ωc
η ac De v =
X
e∈Ωc
−
(f 0 (FeQ ) + f 0 (FeQ ))De v, F defined on each Q.
u−
3
u3
u2
e Q
Q−
u1
u4
u−
4
This shows a reference edge calculation. The edge considered in the derivation below is {u3 − u4 }.
The second term appears because each edge has two contributions: the third part of the line integral in
the element below it, and the first part of the line integral in the element above.
3.3
Modelling Consistency Errors
Now, recall that the atomistic variation is given by
0 = hδE a (u), vi =
X
∂e V De v,
e∈Λ
and we will now use this to generate our consistency errors. We begin by looking at the simplest case:
the edges inside the atomistic region.
3.3.1
Atomistic Consistency Error
This is 0 everywhere in the interior of the atomistic region: E ac = E a + ... so inside the atomistic region
there is no contribution to the variation. We must deal with the interface, however. Firstly we calculate
the error inside the continuum region, which will enable us to evaluate the interface errors.
3.3.2
Interior Continuum Consistency Error
We now consider consistency errors in the interior of the continuum region. By this we mean that no
edge of a Q1 element touches the atomistic boundary Λi - this will be dealt with later. Recall that
hE ac (u)|int(Ωc ) − E (a) (u)|int(Ωc ) , vi = CR−3 +
X
(ηeac (u) − η a (u))De v.
e∈int(Ωc )
Applying the Cauchy Schwarz inequality to the above, we need only bound the `2 difference of these
coefficients:
1
ac
|hE (u) − E
(a)
(u), viint(Ωc ) | ≤ ||Dv||`2
Now, we consider
X
(ηeac (u) − η a (u))2 =
e∈int(Ωc )
X
2
X
(ηeac (u)
e∈int(Ωc )
a
2
− η (u))
.
−
|2f 0 (De u) − f 0 (FeQ ) − f 0 (Fe )|2
e∈int(Ωc )
=
X
−
|f 00 (0)| · |(2De u − FeQ ) − Fe |2 +
e∈int(Ωc )
X
|O((De u)2 )|2
e∈int(Ωc )
by Jensen’s inequality. As Du ∼ `−2 this error will be much smaller than the other terms, and we
henceforth neglect it in our calculations. We now recall the definition of forward differences: here vi is a
single atom spacing in direction i.
12
De u(`) = u(` + vi ) − u(`),
and the 2nd forward difference operator
1
De2 u(`) = (u(` + 2vi ) − 2u(` + vi ) + u(`)),
2
we will show the consistency error be written in terms of second differences of u. For a particular edge
we have that
−
u−
u3 − u4
3 − u4
+
,
2
2
u3 − u4 u2 − u1
F2 =
+
2
2
F2− =
and that
F2− + F2 =
−
u−
u− + 2u3 + u2 − u−
3 − u4 + u3 − u4 + u3 − u4 + u2 − u1
4 − 2u4 − u1
= 3
2
2
and so
(ηeac (u) − η a (u))2 ≤ C(
−
4u3 − 4u4 − u−
3 + 2u3 + u2 − u4 − 2u4 − u1 2
) = (Dx2 u3 − Dx2 u4 )2 ,
2
which are 3rd order difference terms. It follows that we can bound the consistency errors in the
following way:
1
1
1
2
2
2
X
X
X
ac
a
2
3
2
−8
≤ 4C
≤C
(ηe (u) − η (u))
|D u(`)|
|`|
e∈int(Ωc )
`∈int(Ωc )
Z
∞
≈C
r · r−8 dr
`∈int(Ωc )
1
2
=
C
R
R
6
2
=
C
R3
To get an explicit error rate we treat the lattice sum as a Riemann sum to yield an approximate
integral form.
3.4
3.4.1
Coupling Consistency Errors
Atomistic-Continuum Coupling
For the tiles touching the boundary, instead of the tile above and tile below contributing to the continuum
bond weights η ac , only one tile contributes. However, the grac weight is one half on this interface: we
must now consider
X
e∈E i
(ηeac (u) − η a (u))2 =
X
|f 0 (De u) − f 0 (FeQ )|2
e∈E i
due to the weighting of a half that GRAC gives to the η a and a second tile not contributing, an
analogous calculation yields
C
(u3 − u2 ) + (u4 − u1 )
C
(u4 − u1 ) −
= ((u4 − u1 ) − (u3 − u2 ))
2
2
2
1
1
2` + 1
1
. 2−
.
. −3
2
4
`
(` + 1)
`
`
f 0 (De u) − f 0 (FeQ ) ≈
13
and as before, we approximate
with a boundary integral on which we assume R is constant: R in fact
√
varies by a factor of up to 2. This gives the estimate
X
(ηeac (u)
a
2
Z
1
dl
R6
− η (u)) .
e∈E i
3.4.2
1
2
.
R
R6
1
2
5
. R− 2 .
Atomisitic-Nonlinear-Linear Coupling
We wish to also couple the nonlinear continuum to a linear continuum which is also calculated using finite
element method (contrary to using boundary elements). We recall that the full continuum domain Ωc
is written as Ωc = Ωn ∪ Ωl , the nonlinear and linear domains respectively. The consistency analysis is
straightforward as we are able to split up the consistency difference into two parts:
hδE a (u) − δE anl (u), vi = hδE a (u) − δE ac (u), vi + hδE ac (u) − δE anl (u), vi
for v ∈ W˙hac
the first of these is the modelling error that we have already considered in the previous subsection. The
second is called the linearisation error and will be considered here. For any test function v, and shear
modulus µ := ∇2 W (∇y0 ), recalling that y0 = 0 is our homogeneous predictor :
Z
Z
µ
d
2
anl
|∇(u + tv)| dx
=
µ∇u · ∇v dx
hδE (u), vi =
dt Ωl 2
Ωl
t=0
We may then write our consistency as the difference (for N the total number of lattice sites and continuum
nodes) :
ac
hδE (u) − δE
anl
Z
(∇W (∇u) − µ∇u) · ∇v dx =
(u), vi =
Ωl
N Z
X
i=1
(∂i W (∇u) − µ∂i u)∂i v dx
Ωl
An application of Taylor’s theorem about the homogeneous strain yields ∀i ∈ {1 . . . , N } ∃θ ∈ (0, 1)
s.t:
Z
Z
(∂i W (∇u) − µ∂i u)∂i v dx =
Ωl
Ωl
Z
=
Ωl
( ∂i W (0)
| {z }
symmetry: =0
+ ∂i2 W (0)(∇u) + ∂i3 W (θei )|∇u|2 − µ∇u) · ∇v dx
| {z }
=µ
(∂i3 W (θei )|∇u|2 ) · ∇v dx ≤ Ci k(∇u)2 kL2 k∇vkL2
(∗)
where ei is the ith standard orthonormal basis vector of RN and the {Ci }N
i=1 are uniformly bounded, then
(∗) =⇒ hδE ac (u) − δE anl (u), vi ≤ C̃k(∇u)2 kL2 k∇vkL2
Thus we have for the atomistic-FEM radius R for the and using the decay rate ∇u . R−2 (in the case
of point defects) we have
2
Z
∞
r · (r
k(∇u) kL2 .
−4 2
) dr
R
1
Z
2
∞
=
r
R
which yields our convergence rate.
14
−7
1
2
dr
=
C
R3
3.4.3
Atomistic-Linearisation Coupling
We have seen in last subsection that the nonlinear elasticity model can be approximated by a linear
elasticity model, but the problem is still defined in an infinite domain. In this subsubsection, we consider
how to couple the atomistic model directly with the linear elasticity model, which allows us to reduce
the problem into a bounded domain. Assume that the whole space R2 = Ωa ∪ Ωl with Γ = Ωa ∩ Ωl , and
Λ = Λa ∪ Λi ∪ Λl . For displacements u in Ωa and v in Ωl satisfying
R v|Γ = Ih u|Γ , we define a new energy
functional E al (u, v) = E a (u) + E GRAC (u) + E l (v) with E l (v) = µ2 Ωl |∇v|2 and µ Id = ∂ 2 W (∇(Ih u0 )) in
Ωl . Then it is obvious that
min E al (u, v) = min E r (u)
v|Γ =Ih u|Γ
where the reduced energy E r (u) is defined as
E r (u) := E a (u) + E GRAC (u) +
E l (v)
min
v|Γ =Ih u|Γ
Since E l (v) is the linear elasticity energy, recalling that v satisfying far field condition, then minimizing
is equivalent to finding solution to the following exterior Laplacian problem
E l (v)
− µ∆v = 0 in Ωl
v|Γ = Ih u|Γ
1
as |x| → ∞
v(x) ∼ O
|x|
(4)
Since v is defined in infinite domain, it is unrealistic to apply the finite element method to solve the
problem numerically. Instead, one can use boundary integral methods to solve it. The Galerkin boundary
element method can be employed to discretise the boundary integral equation. In [28], it has been proved
that the above exterior problem has a unique solution. Furthermore, the solution v has the following
integral representation in Ωl
Z
∂G(x, y) ∂v
v(x) =
v(y)
−
(y)G(x, y) ds(y), x ∈ Ωl
(5)
∂n(y)
∂n
Γ
1
ln(|x − y|) being the fundamental solution of Laplace equation in two dimensions.
with G(x, y) := − 2π
Given density ϕ ∈ C(Γ), if we define single-layer potential
Z
Sϕ(x) :=
G(x, y)ϕ(y) ds(y), x ∈ R2 \ Γ
Γ
and double-layer potential
Z
Dϕ(x) :=
Γ
∂G(x, y)
ϕ(y) ds(y), x ∈ R2 \ Γ
∂n(y)
then
v(x) = D v|Γ
∂v ,
−S
∂ν Γ
x ∈ Ωl
To study boundary integral equations, we also introduce the following integral operators
Z
(V ϕ)(x) :=
G(x, y)ϕ(y) ds(y), x ∈ Γ
Γ
Z
(Kϕ)(x) :=
Γ
∂G(x, y)
ϕ(y) ds(y),
∂ν(y)
15
x∈Γ
(6)
and
0
Z
(K ϕ)(x) :=
Γ
∂G(x, y)
ϕ(y) ds(y),
∂ν(x)
x∈Γ
where S is called the single-layer operator, K is called the double-layer operator and K 0 is its adjoint.
Here we assume that Γ is Lipschitz and piece-wise smooth, then we collect some mapping properties of
layer operators in the following (see [16])
1
(i) S : H −1/2 (Γ) → Hloc
(R2 )
1
(ii) D : H 1/2 (Γ) → Hloc
(R2 \ Γ)
(iii) V : H −1/2 (Γ) → H 1/2 (Γ)
(iv) K : H 1/2 (Γ) → H 1/2 (Γ)
(v) K 0 : H −1/2 (Γ) → H −1/2 (Γ)
Since v has the representation (5), the Dirichlet boundary condition in (4) gives us the following first
kind boundary integral equation on Γ
Vϕ=f
(7)
∂v
with unknown density ϕ := ∂n
and right hand side f := K − 21 I u.
−1
1
Theorem 3.1. Given f ∈ H 2 (Γ), the boundary integral equation (7) has a unique solution ϕ ∈ H∗ 2 (Γ)
R
1
−1
where H∗ 2 (Γ) = {ϕ ∈ H − 2 (Γ) : Γ ϕ = 0}.
−1
1
1
−1
−1
1
Proof. Since H∗ 2 (Γ) ⊂ H − 2 (Γ), then f ∈ H 2 (Γ) = (H − 2 (Γ))∗ ⊂ (H∗ 2 (Γ))∗ . For ϕ, ψ ∈ H∗ 2 (Γ), define
−1
a bilinear form b(ϕ, ψ) := hV ϕ, ψiH −1/2 ×H 1/2 . By Theorem 6.22 in [29], b(·, ·) is coercive in H∗ 2 (Γ), i.e.
hV ϕ, ϕi ≥ ckϕk
H
−1
−1
2
(Γ)
for ϕ ∈ H∗ 2 (Γ)
−1
Hence it follows from the Lax-Milgram Theorem that (7) has a unique solution ϕ ∈ H∗ 2 (Γ).
Once we have found the solution ϕ of (7), the solution of the exterior Laplacian problem v is given
∂v
by integral equation (5) with ∂n
= ϕ. Now we consider the numerical discretization of (7). Let Γ is
0 M
0
decomposed by boundary elements τ` , i.e. Γ = ∪M
`=1 τ ` , and define Sh (Γ) := span{ϕk }k=1 as the space of
functions which are piece-wise constant with respect to the boundary decomposition {τ` }M
`=1 . The basis
functions ϕ0k are given by
(
1 for x ∈ τk ,
0
ϕk (x) =
0 otherwise
In addition to Sh0 , one can also define piece-wise linear basis function space Sh1 (Γ) := span{ϕ1i }M
i=1
with basis
for x = xi ,
1
1
ϕi (x) = 0
for x = xj 6= xi ,
linear otherwise
P
1
0
0
Since Sh0 (Γ) is densely included in H − 2 (Γ), by using ϕh (x) = M
k=1 ak ϕk (x) ∈ Sh (Γ), the Galerkin
variational formulation of (7) seeks ϕh ∈ Sh0 (Γ) such that
1
hV ϕh , ψh i = hf, ψh i = h(K − I)u, ψh i, for ψh ∈ Sh0 (Γ)
2
16
−1
−1
Since V is only coercive in P
H∗ 2 (Γ), to ensure the approximate solution ϕh ∈ H∗ 2 (Γ), we need to
supply an additional condition M
k=1 ak = 0. So we define
0
S∗,h
(Γ) := {ϕh (x) ∈ Sh0 (Γ) : ϕh (x) =
M
X
ak ϕ0k (x) with
k=1
M
X
ak = 0}
k=1
0 (Γ) such that
and find solution ϕh ∈ S∗,h
1
0
hV ϕh , ψh i = hf, ψh i = h(K − I)u, ψh i, for ψh ∈ S∗,h
(Γ)
2
(8)
And then the approximated solution in the exterior domain is given by
vh = D(u|Γ ) − S(ϕh )
(9)
Applying Theorem 12.7 in [29], we can obtain the convergence result in the following theorem.
Theorem 3.2. Let ϕ ∈ H 1 (Γ) be the unique solution of (7) with right hand side u ∈ H 2 (Γ), and
0 (Γ) be the solution to (8), then there holds the error estimate
ϕh ∈ S∗,h
3
kϕ − ϕh k
H
−1
2
(Γ)
and
≤ ch 2 |ϕ|H 1 (Γ)
3
k∇v − ∇vh kL2 (Ωl ) ≤ ch 2 kuk
1
H 2 (Γ)
|ϕ|H 1 (Γ)
Now we turn to the consistency analysis for a/l coupling methods. We begin with the consistency of
the BEM discretization. Assume that v and vh are given by (6) and (9) respectively, for any test function
w ∈ H 1 (Ωl ), by using Theorem 3.2, we have
∂v
∂vh
−
), wi| = µ|h(ϕ − ϕh ), wi| ≤ µkwk 12 kϕ − ϕh k − 21
H (Γ)
H
(Γ)
∂n
∂n
5
3
3
3
∂v
≤ ch 2 kwk 12 |ϕ|H 1 (Γ) = ch 2 kwk 21 | |H 1 (Γ) ≤ cR− 2 h 2 kwk 12
H (Γ)
H (Γ) ∂n
H (Γ)
|hδE l (v), wi − hδE l (vh ), wi| = µ|h(
with R sufficiently large and the last inequality follows from the far field condition that v (j) (x) ∼
O(|x|−j−1 ) at infinity. Recalling the consistency error for the GRAC energy in a/n/l coupling method is
5
of O(R− 2 ), we obtain the consistency error for a/l coupling method
5
|hE a (u) − E al (u), wi| ≤ CR− 2 |w|H 1
Under the assumption of stability, we obtain the following error estimate
5
|ua − ual |H 1 ≤ CR− 2 ,
3.5
E a (ua ) − E al (ual ) ≤ CR−5
(10)
Remark on Other Defects
In this report the primary focus for the analysis is on the point defect. However given some rates of decay
that are ‘known’ (see [14], [30]), we may then deduce some heuristics about the linearisation procedure.
Defect Classification
Point Defect
Dislocation
Crack
Decay Rate of ∇u
R−2
R−1
1
R− 2
Decay of CB . k∇2 ukL2
R−2
R−1
1
R− 2
17
Decay of linear CB . k(∇u)2 kL2
R−3
R−1
RN
1
2 2
2
R r(∇u ) ∼ (ln(N )) → ∞
These decay estimates have been proven for point defects here and dislocations in [14] but obtaining
rigorous decay rates for the crack is still open (the decay of ∇u is based on continuum predictions). However these results show heuristically that for point defects the linearised model FEM should prove more
effective than the Cauchy Born model FEM in coupling. In dislocation it also appears as effective and
linearised models are less computationally complex hence could prove beneficial. Unfortunately linearisation is unlikely to be possible for the crack due to the highly nonlocal nonlinearities of these phenomena,
1
which gives rise to such a slow (R− 2 ) decay of the gradient of the solution, which leads to the linearisation
gradient actually diverging!
4
Implementation
This section is dedicated to the essential steps and calculations that were performed for the implementation
of the models and the coupling methods. To begin we create a template algorithm that will be used
throughout the implementation process - this will be adapted and shown in more detail in § 4.2 for model
coupling.
Steepest descent algorithm
1. Begin with reference defect displacements u0 , the initial displacement u(0) , and a tolerance T .
2. On the ith step, calculate the gradient of the energy functional which is being minimized: ∇E model (u(i) +
u0 )
3. Adjust this gradient according to u0 and imposed boundary conditions to obtain ∇E model (u(i) + u0 ).
4. Pick a step size α and step u(i+1) = u(i) − α∇E model (u(i) + u0 )
5. If |∇E model (u(i+1) + u0 )| < T then the solution is u = u(i+1) , otherwise, repeat algorithm from step
2.
E model represents which energy the model coupling will require minimisation in the more specific
frameworks further on. We now move onto the implementation of the three models that we wish to
couple together.
4.1
Implementing the Models
For this section we consider a particular atomistic potential V ({Dui }4i=1 ) =
4.1.1
P4
i=1 (Dui )
2
+ (Dui )4
Atomistic Model
The first model that is considered is the atomistic model. With regards to computation we must calculate
everything directly from the atomistic potential Φ. For a reference deformation u0 : R2 → R and
a
displacement u : R2 → R,
P with the atomistic energy E (u). Consider taking u0 = 0 for simplicity and
a
then we look at E (u) = `∈Λa Φ` (u) with
Φ` (y) = V (D1 y(`), D2 y(`), D3 y(`), D4 y(`))
18
where V is a potential function of the finite stencil Di y(`) = y(`+vi )−y(`), Di+2 y(`) = y(`−vi )−y(`), i =
1, 2. In our project, V : R4 → R is given by
V (F1 , F2 , F3 , F4 ) =
4
X
f (Fi ),
f (t) := t2 + t4 .
with
i=1
We wish to calculate the gradient of the energy on the interior of Λa , (if for example using Dirichlet
boundary conditions), hence consider ∇E a (u) = {∂uk E a (u)}N
k=1 (N represents the size of the interior
atomistic domain, uk interior atom displacements).
X
X
∂uk V (D1 u(`), D2 u(`), D3 u(`), D4 u(`))
∂uk Φ` (u) =
∂uk ∇E a (u) =
`∈Λa
`∈Λa
= ∂uk V (uk1 − uk , uk2 − uk , uk3 − uk , uk4 − uk )
+ (−1)∂uk V (uk − uk1 , · · · , · · · , · · · ) + (−1)∂uk V (· · · , uk − uk2 , · · · , · · · )
+ (−1)∂uk V (· · · , · · · , uk − uk3 , · · · ) + (−1)∂uk V (· · · , · · · , · · · , uk − uk4 )
=2
4
X
∂uk f (uki − uk )
i=1
4.1.2
Cauchy Born Model
In general, the Cauchy Born Energy (at a site) `, W : RN → R is given by
W (F ) =
1
V (F · R` ),
|Vor(`)|
where Vor(`) is the Voronoi cell of ` and R` is the matrix representation of the interaction range at the
site `. The crystal is a regular square lattice of length 1 (atom spacing), thus we have ∀` Vor(`) = 1 and
1 0 −1 0
nearest neighbour interactions yields R` =
representing our interaction stencil.
0 1 0 −1
|
{z
}
e1 e2 e−1 e−2
We obtain:
W (F1 , F2 ) = V
(F1 F2 )
1 0 −1 0
0 1 0 −1
= V (F1 , F2 , −F1 , −F2 )
We wish to calculate for the discrete function u, the derivative of the energy E ac (u) = E a (u)+
Z
Ωc
|
W (∇(Iu)) dx
{z
}
(∗)
where I is a linear interpolant of u. We consider
c
E =
XZ
T ∈T
W (∇(Iu|T )) dx =
T
XZ
T ∈T
T
W
3
X
!
ui ∇φi
dx
i=1
Where φi are the local basis functions, ui P
evaluation at ith vertex of element
T . In our specific case,
P
t ∈ R4 the site potential is given by V (t) = 4i=1 t2i + t4i . Denoting Sj = 3i=1 ui ∂j φi (for each local basis
of elements T )
XZ
XZ
W (S1 , S2 ) dx =
V (S1 , S2 , −S1 , −S2 ) dx
T ∈T
T
T ∈T
=2
T
2
XZ X
T ∈T
19
T j=1
(Sj )2 + (Sj )4
dx
There is another important quantity we must calculate with the Cauchy Born approximation, which
is the derivative of the energy - as this will be used to calculate direction of step in the steepest descent
arguement. We proceed viewing the Cauchy Born approximate entirely from a finite element standpoint,
then it is straightforward application of the chain rule. We denote the number of degrees of freedom
(finite element nodes) by N:
∇E c (u) = (∂uk E c (u))N
k=1
!
!
Z
Z
3
3
XZ
X
X
X
W0
ui ∇φi · ∇φk dx
∂uk W
ui ∇φi dx =
W (∇(Iu) dx =
∂uk E c (u) = ∂uk
Ωc
T ∈T
T
T ∈T
i=1
T
where W 0 (F ) = V 0 (F1 , F2 , −F1 , −F2 ) = ∂1 V + ∂2 V − (−∂1 V ) − (−∂2 V ) = 2
implement the following equation
!
2
3
XZ X
X
c
∂j V
∂uk E (u) =
ui ∇φi · ∇φk dx
T ∈T
T j=1
i=1
P2
j=1 ∂j V
. Thus we may
i=1
where the derivative of our site potential of a 4-vector t, is given by ∂j V (t) = 2tj + 4t3j .
4.1.3
Linearisation of the Cauchy Born Model
As we consider antiplanar motion and do not prescribe an overall shear to the crystal, our identity map
is (x, y, 0) → (x, y, 0) so the atoms’ movement in the z-direction is the 0 map. We therefore expand the
Cauchy-Born energy as follows:
1
W (F0 + G) ≈ W (F0 ) + ∇W (F0 )(G − F0 ) + (G − F0 )T ∇2 W (F0 )(G − F0 ).
2
Noting W (F0 ) = W (0) = 0 and using the symmetry of V ,
∂F1 W
∂1 V − ∂3 V
∇W (F ) =
=0
=
∂F2 W
∂2 V − ∂4 V
Thus, the linearisation is given by the second order term only:
∂12 V − 2∂13 V + ∂32 V
∂12 V − ∂14 V − ∂23 V + ∂34 V
2
∇ W =
∂12 V − ∂14 V − ∂23 V + ∂34 V
∂22 V − 2∂24 V + ∂42 V
2
∂1 V − 2∂13 V + ∂32 V
0
=
0
∂22 V − 2∂24 V + ∂42 V
because the cross-derivatives are 0 from the linear composition of Φ in our case. Denoting Φ(t) =
P
4
i=1 f (ti ) we obtain that, from inputting the form f (t3 ) = f (−t1 )
∂12 V (0) − 2∂13 V (0) + ∂32 V (0) = 2f 00 (s)|s=0
= 2(2 + 12s2 )|s=0
= 4,
with the other nonzero entry having this value. It follows that ∇2 W (0) = µI, µ := 4.
Our linearised energy term looks as follows:
Z
Z
µ
l
2
E (v) =
|∇v| dx = 2
|∇v|2 dx
Ωl 2
Ωl
Finding out the value of the shear modulus µ is important in the coupling of the linear model as seen
in the following subsection.
20
4.2
4.2.1
Implementing the Coupling Methods
Atom-FEM
With these preliminaries and the definition of the Atomistic and Cauchy Born energies as given in subsections 4.1.1 and 4.1.2, we may implement the atomistic continuum energy.
During the steepest descent we must calculate the gradient of E GRAC , the case of the interface atoms
is less trivial that for the nearest neighbour atomistic potential but follows with a similar method as found
in 4.1.1. We consider as an example the case of an atom uk , positioned on the ‘left hand edge’:
∂uk ∇E GRAC (u) =
X
w`i ∂uk Φi` (u) =
`∈Λi
X
w`i ∂uk V (D1 u(`), D2 u(`), −D1 u(`), D4 u(`))
`∈Λa
1
= ∂uk V (uk1 − uk , uk2 − uk , uk − uk1 , uk4 − uk )
2
1
1
+ (−1)∂uk V (uk − uk1 , · · · , · · · , · · · ) + (−1)∂uk V (· · · , uk − uk2 , · · · , · · · )
2
2
1
1
+ ∂uk V (· · · , · · · , uk − uk1 , · · · ) + (−1)∂uk V (· · · , · · · , · · · , uk − uk4 )
2
2
4
X
1
=2·
∂uk f (uki − uk )
2
i=1
One can check that for corners we arrive at the above expression with factor 2 · 41 and for the outermost
interior layer of atoms, despite the new introduced non locality we still arrive with factor 2 as with the
atomistic energy gradient.
We may now implement the above gradient with the Cauchy Born and atomistic gradients to update
the atom positions in our steepest descent method. Note that Step 3. does not effect the atomisticcontinuum interface.
4.2.2
Atom-BEM
To minimize the a/l energy functional E al (u) by the steepest decent method, we need to evaluate the
energy and its gradient, both involving the computation of exterior problem (4) or its equivalent integral
equation (7).
Since the discrete function u can be viewed as a vector u, we decompose the vector as u = [uA , uI ]
according to whether the site lies on the boundary. Suppose we seek approximated density ϕh =
PM
PM
PM I 1
− 12
0
i=1 ui ϕi ∈
k=1 ak ϕk (x) ∈ H∗ (Γ) with
k=1 ak = 0. If u|Γ is replaced by its linear interpolation uh =
Sh1 (Γ), then the load vector f = (f` )M
can
be
evaluated
as
`=1
f` =
M
X
i=1
1
uIi h(K − I)ϕ1i , ϕ0i i
2
i.e.
f = (Kh − Mh /2)uI
where uI = (uIi )M
i=1 and
Mh [`, i] = hϕ1i , ϕ0` i, Kh [`, i] = hKϕ1i , ϕ0` i
If we denote Vh := (hV ϕ0i , ϕ0` i)M
i,`=1 , then the solution vector a satisfies the following linear system
Vh a = (Kh − Mh /2)uI
21
and the linearisation energy
µ
E (v) = −
2
l
Z
Γ
∂v
µ
v≈−
∂n
2
M
Z
ϕh uh = −
Γ
µX
µ
ai uIi hϕ1i , ϕ0i i = − aT Mh uI
2
2
i=1
Furthermore, its gradient can be evaluated as
∇uA E l (v[u])
0
l
∇u E (v[u]) =
= −µ
Mh a
∇uI E l (v[u])
Those above together with the evaluations on atomistic energy allows us to carry out the steepest decent
method to minimize the ATOM-BEM energy.
5
Numerical Results
Test Example: Let Φ` (u)P= V (D1 y(`), D2 y(`), D3 y(`), D4 y(`)) with y = u + u0. Here V : R4 → R is
define as V (t1 , t2 , t3 , t4 ) = 4i=1 f (ti ) with f (t) = t2 + t4 . Consider the reference displacement u0 shown
below
70
0.5
0.4
60
0.3
50
0.2
0.1
40
0
30
−0.1
−0.2
20
−0.3
10
−0.4
0
−0.5
0
10
20
30
40
22
50
60
70
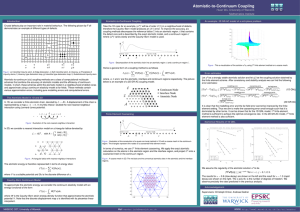
5.1
Atom-FEM Couplings
To test the atomistic continuum couplings, we used the defect described above. We chose a sequence
of atomistic radii [3, 4, 6, 8]. We then scaled the start of the continuum region as R3/2 . An atomistic
simulation of radius 2 ∗ (8 + 83/2 ) ≈ 62 was used to approximate the exact solution. The following results
were produced:
0
10
−1
error
10
ATOM−FEM−h1−error
−2
10
R−1
−3/2
R
R−2
R−5/2
−3
10
0.5
0.6
10
0.7
10
0.8
10
R
0.9
10
10
Figure showing the EOC for atom-nonlinear FEM using a log-log plot.
0
error
10
−1
10
atm-lin
R−1
R−3/2
R−4/2
−2
10
0.5
10
0.6
0.7
10
0.8
10
10
0.9
10
R
Figure showing the EOC for atom-linear FEM using a log-log plot.
in line with expectations, as scaling the continuum region as R3/2 should allow us to see this rate.
We also ran simulations for the linear FEM with a continuum region scaled as R2 : however for this
to run due to time constraints the gradient tolerance was increased from 1e − 6 to 1e − 5. The reference
solution was produced on a correspondingly larger grid. This produced the following results: again as
expected according to theory.
23
0
10
−1
10
atm-lin
−2
10
R−3/2
R−2
R−5/2
−3
10
0.5
10
0.6
10
0.7
10
0.8
0.9
10
10
Figure showing the EOC for atom-linear FEM using R2 and a log-log plot.
5.2
Atom-BEM Coupling
To test the convergence rate of a/l coupling method, we firstly compute a reference solution ual
e which is
regarded as the ’exact’ solution by our Atom-Bem solver with a large domain (101×101 in the experiment).
Then we compare the error between energy of the Atom-Bem solution in a series of small domain and the
reference energy in Figure 4. It is shown that the computational rate is O(R−4 ) which seems contradicting
with the theoretical rate. However, we are not clear whether the constant in the error estimate (10)
depends on R, so the theoretical rate might be O(R−4 ) in that case.
0
10
Atom−energy−error
Atom−Bem−energy−error
−1
O(N−2)
10
O(N−4)
−2
10
−3
error
10
−4
10
−5
10
−6
10
−7
10
0
10
1
10
N
2
10
Figure 4: Convergece rate for Atom-Bem Energy
24
6
Further Work
There are numerous avenues for to pursue in any future work. Some examples include:
• Implement many body nearest neighbour potentials, with EAM model [1]
• Include coarse graining of FEM regions to allow for larger simulations
• Include preconditioning for drastically larger simulations
• Extend analysis to cover these cases
• Expand to more complicated defects. Nonlinear elasticity (formally) seem to be the better choice
there.
Incorporating EAM potentials would yield more realistic simulations- and preconditioning/coarse
graining would allow simulations to be run on much larger scales. However, of course, the accompanying
analysis must be generalised to verify any convergence rates obtained through further implementation.
In our work thus far there is no qualitative difference between nonlinear and linear elasticity. Coarse
graining and including more elaborate defects would require a balancing of errors incurred: where to place
different regimes so that the error from each does not overwhelm the others.
25
References
[1] M. S. Daw and M. I. Baskes. Embedded-Atom Method: Derivation and Application to Impurities,
Surfaces, and other Defects in Metals. Physical Review B, 20, 1984.
[2] M. Ortiz, R. Phillips, and E. B. Tadmor. Quasicontinuum analysis of defects in solids. Philosophical
Magazine A, 73(6):15291563, 1996.
[3] M. Luskin and C. Ortner. Atomistic-to-continuum-coupling. Acta Numerica, 2013.
[4] C. Ortner and A. V. Shapeev. Analysis of an Energy-based Atomistic/Continuum Coupling Approximation of a Vacancy in the 2D Triangular Lattice. Math. Comp., 82, 2013.
[5] S. P. Xiao and T. Belytschko, A bridging domain method for coupling continua with molecular dynamics, Comput. Methods Appl. Mech. Engng, 193, 1645-1669, 2004.
[6] M. Luskin, C. Ortner, B. Van Koten. Formulation and optimization of the energy-based blended,
Comput. Methods Appl. Mech. Engrg. 253, 160-168, 2013.
[7] M. Luskin, B. Van Koten. Analysis of Energy-Based Blended Quasicontinuum Approximations, arXiv
:1008.2138v3.
[8] R. Miller,E.B. Tadmor, R Phillips and M. Ortiz, Quasicontinuum simulation of fracture at the atomic
scale, Modelling Simul. Mater. Sci. Eng. 6 (1998) 607638.
[9] A. Shapeev, Consistent energy-based atomistic/continuum coupling for two-body potentials in one
and two dimensions, Multiscale. Model. Simul. 9 (3) (2011) 905932.
[10] A. Shapeev, Consistent energy-based atomistic/continuum coupling for two-body potentials in three
dimensions, SIAM J. Sci. Comput.. 34 (3) (2013) B335-B360.
[11] T. Shimokawa, J. Mortensen, J. Schiotz, K. Jacobsen, Matching conditions in the quasicontinuum
method: removal of the error introduced at the interface between the coarse-grained and fully atomistic
region, Phys. Rev. B 69 (21), 214104, 2004.
[12] W. E, J. Lu, J. Yang, Uniform accuracy of the quasicontinuum method, Phys. Rev.B 74 (21), 214115,
2006.
[13] C. Ortner and L. Zhang. Construction and sharp consistency estimates for atomistic/continuum
coupling methods with general interfaces: a 2D model problem. SIAM J. Numer. Anal., 50, 2012.
[14] V. Ehrlacher, C. Ortner, and A. V. Shapeev. Analysis of boundary conditions for crystal defect
atomistic simulations. ArXiv, 1306.5334, 2013.
[15] C. Ortner and L. Zhang. Energy-based atomisitic-to-continuum coupling without ghost forces. ArXiv,
1312.6814, 2013.
[16] S. Sauter and C. Schwab. Boundary Element Methods. Springer Series in Comp. Maths, Volume 39,
2011
[17] M. Aurada, M. Feischl, T. Führer, M. Karkulik, J. Melenk, D. Praetorius. Classical FEM-BEM
coupling methods: nonlinearities, well-posedness, and adaptivity. ArXiv, 1211.4225, 2012.
[18] C. Johnson and J. Nedelec. On the coupling of boundary integral and finite element methods. Math.
Comp., 35 (152), 1063-1079, 1980.
26
[19] J. Bielak, R. MacCamy. An exterior interface problem in two dimensional elastodynamics, Quart.
Appl. Math., 41, 143-159, 1984.
[20] M. Costabel. A symmetric method for the coupling of finite elements and boundary elements.The
Mathematics of Finite applications IV, MAFELAP, 1987.
[21] P. Zhang, H. Jiang, Y. Huang, P.H. Geubelle, K.C. Hwang, An atomistic-based continuum theory
for carbon nanotubes: analysis of fracture nucleation, J. Mech. Phys. Solids, 52, 977-998, 2004.
[22] K.Y. Volokh , K.T. Ramesh, An approach to multi-body interactions in a continuum-atomistic
context: Application to analysis of tension instability in carbon nanotubes, J. Mech. Phys. Solids
43, 7609-7627, 2006.
[23] V. Ehrlacher and C. Ortner and A. V. Shapeev, Analysis of Boundary Conditions for Crystal Defect
Atomistic Simulations, ArXiv, 1306.5334
[24] T. Hudson, C. Ortner, Existence and stability of a screw dislocation under anti-plane deformation,
ArXiv, 1304.2500.
[25] J. A. Moriarty, Analytic representation of multi-ion interatomic potentials in transition metals, Phys.
Rev. B, 42, 1609-1628, 1990.
[26] C. Ortner, F. Theil, Justification of the CauchyBorn approximation of elastodynamics, J. Arch. Rat.
Mech, 207 (3). pp. 1025-1073, 2013.
[27] H. Föll, online notes on crystal defects, relevant section
http://www.tf.uni-kiel.de/matwis/amat/def_en/kap_5/backbone/r5_2_2.html.
[28] R. Kress, Linear integral equations, 2nd ed. Springer-Verlag, New York, 1997.
[29] O. Steinbach, Numerical Approximation Methods for Elliptic Boundary Value Problems, Finite and
Boundary Elements. Springer-Verlag, New York, 2008.
[30] A.T. Zehnder, Fracture Mechanics, Lecture Notes in Applied and Computational Mechanics 62,DOI
10.1007/978-94-007-2595-9 2, Springer Science+Business Media B.V. 2012.
27