NOTES AND CORRESPONDENCE A J. S
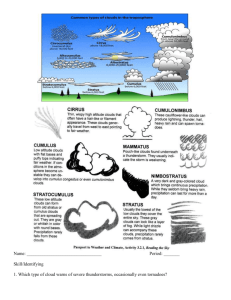
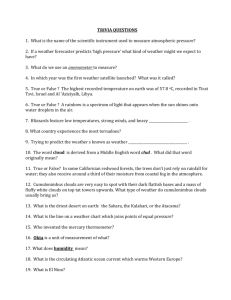
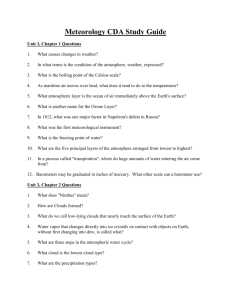
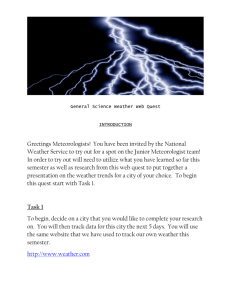
advertisement

1800 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY VOLUME 24 NOTES AND CORRESPONDENCE A Multispectral Technique for Detecting Low-Level Cloudiness near Sunrise ANTHONY J. SCHREINER, STEVEN A. ACKERMAN, AND BRYAN A. BAUM Cooperative Institute for Meteorological Satellite Studies, University of Wisconsin—Madison, Madison, Wisconsin ANDREW K. HEIDINGER National Oceanic and Atmospheric Administration/National Environmental Satellite, Data, and Information Service, Center for Satellite Applications and Research, Madison, Wisconsin (Manuscript received 19 July 2006, in final form 6 February 2007) ABSTRACT A technique using the Geostationary Operational Environmental Satellite (GOES) sounder radiance data has been developed to improve detection of low clouds and fog just after sunrise. The technique is based on a simple difference method using the shortwave (3.7 m) and longwave (11.0 m) window bands in the infrared range of the spectrum. The time period just after sunrise is noted for the difficulty in being able to correctly identify low clouds and fog over land. For the GOES sounder cloud product this difficulty is a result of the visible reflectance of the low clouds falling below the “cloud” threshold over land. By requiring the difference between the 3.7- and the 11.0-m bands to be greater than 5.0 K, successful discrimination of low clouds and fog is found 85% of the time for 21 cases from 14 September 2005 to 6 March 2006 over the GOES-12 sounder domain. For these 21 clear and cloudy cases the solar zenith angle ranged from 87° to 77°; however, the range of solar zenith angles for cloudy cases was from 85° to 77°. The success rate further improved to 95% (20 out of 21 cases) by including a difference threshold of 5.0 K between the 3.7- and 4.0-m bands, requiring that the 11.0-m band be greater than 260 K, and limiting the test to fields of view where the surface elevation is below 999 m. These final three limitations were needed to more successfully deal with cases involving snow cover and dead vegetation. To ensure that only the time period immediately after sunrise is included the solar zenith angle threshold for application of these tests is between 89° and 70°. 1. Introduction A noted difficulty in cloud detection using remotely sensed radiances occurs when attempting to detect low clouds and fog just after sunrise, during the transition from nighttime cloud-detection techniques to daytime methods. In practice, the thermal difference between the longwave window (11.0 m) brightness temperature and the surface skin temperature is frequently within the noise limitations of the observed brightness temperatures when low clouds and fog are present. As a result cloud detection errors near sunrise (this region Corresponding author address: Anthony J. Schreiner, CIMSS, University of Wisconsin—Madison, 1225 W. Dayton St., Madison, WI 53706. E-mail: tonys@ssec.wisc.edu DOI: 10.1175/JTECH2092.1 © 2007 American Meteorological Society JTECH2092 is also described as the day–night terminator) occur in orbiting and geostationary remote sensing platforms. In the case of geostationary satellites, as will be discussed here and in particular the Geostationary Operational Environmental Satellite (GOES) sounder (Menzel and Purdom 1994; Menzel et al. 1998), the “disappearing clouds syndrome” can at times be seen to “move” from east to west over the course of 3 or 4 h. For the GOES sounder cloud mask algorithm (Schreiner et al. 2001), as the sun rises over a region, the daytime series of tests become the primary means for identifying clouds. Reasons for the transition from “nighttime” to “daytime” are twofold. First, the techniques for detecting low clouds at night strongly depend on the differences between the infrared (IR) 11.0-m and shortwave window (3.7 m) bands (Eyre 1984; d’Entremont 1986; Saunders and Kriebel 1988; OCTOBER 2007 NOTES AND CORRESPONDENCE 1801 FIG. 1. Composite of the GOES sounder cloud mask showing 1200–1400 UTC images for 6 Jun 2005. Note the undetected and, then again, detected clouds occurring (area within the yellow oval) after local sunrise. (lower-right-hand panel) The 1346 UTC sounder visible image. Kleespies 1995; Lee et al. 1997; Ackerman et al. 1998). At night for clear-sky scenes, the 3.7-m minus 11.0m brightness temperature difference over land ranges from approximately ⫺4 to ⫹1 K, depending on surface emissivity and the atmospheric water vapor distribution. However, the difference between these two bands can be a strong indicator of low-level cloudiness and/or fog. For the case of clouds having small effective radii and high optical thicknesses, the 11.0-m value tends to be greater than that of the 3.7-m value (Baum et al. 2003). As the sun rises above the horizon this difference becomes positive because of the contribution of solar reflection in the 3.7-m band. A second reason for the “disappearance” of low clouds just after sunrise is the failure of the visible reflectance tests for low-altitude clouds and fog. Visible thresholds for cloud/no-cloud detection during the daytime are higher over land than over water, as well as a function of terrain type. These terrain types are dependent on the time of year, elevation, type of vegetation, snow, and roughness of the landscape. Just after sunrise the visible reflectance of clouds, especially low clouds and fog, is below the threshold for cloudiness over the conterminous United States (CONUS), and thus are incorrectly flagged as clear. Mid- and high-level clouds are not as sensitive to this visible threshold, as they tend to be brighter and can be detected by comparison of the 11.0-m brightness temperature to a skin temperature or modified surface observed temperature. Also, as with the current GOES imager, the visible band of the sounder is not calibrated once the satellite achieves orbit. The degradation of the visible (imager) band has been observed by Hillger et al. (2003) and Daniels et al. (2001), since the launch of GOES-11 and GOES-12. The net result of this cloud-detection shortcoming can frequently be seen when a loop of derived imagery is set in motion (e.g., Fig. 1). Prior to sunrise low clouds are correctly depicted (1146 UTC), as noted by the area highlighted within the oval in the southwestern portion of the figure. For the 1246 UTC scan line start time image, the first image after sunrise, nearly the entire region of low cloudiness is not detected by the algorithm currently employed operationally. Then, once again at 1346 UTC the cloud bank along the southern portion of the CONUS is correctly depicted. In addition to incorrectly portraying cloudiness in the loops of derived imagery these derived data may have a negative impact when used in the initialization step for numerical weather prediction models (Bayler et al. 2000). By exploiting three of the IR bands of the GOES sounder for a particular field of view (FOV), a technique for identifying these low clouds just after sunrise 1802 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY has been developed. The IR window bands for the GOES sounder are the longwave window (11.0 m), shortwave window (3.7 m), and a second shortwave window (4.0 m). In essence, the simple difference (SIMDIF) technique looks at the difference between the 3.7- and 11.0-m bands and the difference between the 3.7- and 4.0-m bands. If the differences fall within the predetermined thresholds and some additional criteria based on 11.0-m temperature, surface elevation, and solar zenith angle (SZEN), the FOV is defined as cloudy. The SIMDIF technique defines “just after sunrise” as the first time period of the GOES sounder data at a particular location where the SZEN is 89° ⱖ SZEN ⱖ 70°. The cutoff is set at 70° because at SZEN ⬍ 70° certain difference thresholds begin to break down. This will be demonstrated in the following section. The purpose of this note is to detail the criteria needed to satisfy the SIMDIF technique and to define why the SIMDIF is successful. The background section briefly describes the reasoning. Two case studies will be examined in section 3 showing both the success and the limitations of the SIMDIF technique. The summary and future work will summarize the note and introduce future goals. 2. Background a. Theory The low thermal contrast between clear skies and low cloud and fog makes detection of these clouds at night challenging (Ellrod 1995). Techniques that make use of the shortwave infrared (i.e., 3.5–4-m region) and longwave infrared (i.e., 10–12 m) observations exploit the emissivity differences at these wavelength regions for stratus and fog conditions. These clouds have a lower emissivity in the shortwave infrared window than the longwave infrared window, resulting in negative brightness temperature differences when using the following relationship: BT3.7 ⫺ BT11. This negative difference is a function of the cloud droplet size and the underlying surface. Baum et al. (2003) provide some radiative transfer calculations for both ice and water clouds at night that provide insight into the behavior of this brightness temperature difference as a function of particle size and optical thickness, but new calculations are not provided herein. Over clear-sky vegetative surfaces and water the differences are generally larger than ⫺0.5 K. Clear-sky desert scenes have brightness temperature differences that range between approximately ⫺5 and ⫺1 K, making detection of optically thin low-level clouds at night more difficult because of the emissivity differences of soil. During the day the brightness temperature difference between BT3.7 and BT11 is large VOLUME 24 because of the reflection of solar energy at 3.7 m. This brightness temperature difference technique is very successful at detecting low-level water clouds during the day. The approach is generally not applied over deserts during daytime, as bright desert regions with highly variable emissivities tend to be classified incorrectly as cloudy with this test. In general, the emissivity differences of the same stratiform water cloud being observed simultaneously by the 3.7- and 4.0-m bands is small as is the emissivity differences with varying surface types (Hunt 1973; Sutherland 1986; Ellrod 2006). Here we explore using the differences between BT3.7 and BT4.0 for cloud detection, since over clouds during the day, BT3.7 ⬎ BT4.0 because there is more reflected solar energy at 3.7 m. The following approach has been developed to ascertain whether the observed FOV is either clear or obscured by low clouds. The logic is applied to a given FOV when the SZEN is within the following window: 89.0° ⬍ SZEN ⬍ 70.0°, but is limited to FOVs with a surface elevation (EL) threshold less than 999 m. The SZEN window described above was chosen because it roughly defines no more than one time period following sunrise for a GOES sounder time period. This is important because the defined threshold, listed in Eq. (1) below, can be easily surpassed in clear-sky situations for SZEN values less than 70°. Given these conditions, an FOV is defined cloudy if the brightness temperature differences all meet the following criteria: BT3.7 ⫺ BT11 ⬎ 5.0 K, BT3.7 ⫺ BT4.0 ⬎ 5.0 K, BT11 ⬎ 260.0 K. and 共1兲 共2兲 共3兲 The elevation check was added as a result of continued failure of this check in elevated terrain, especially in the late fall and early spring when vegetation is quite sparse over the mountainous regions. Thermal checks (2) and (3) were included to minimize the effects of snow, especially fresh snow cover at all elevations. b. Data Twenty-one different clear and cloudy cases were examined to determine whether the BT3.7 ⫺ BT11 brightness temperature difference [Note: This difference is defined as the window difference (WNDF).] for a given FOV at a clear versus cloudy scene just after sunrise correctly satisfied the difference threshold (5 K) to properly identify the FOV as clear or cloudy. For the 21 cases ranging from clear (i.e., 1) and low cloudy (i.e., 3) conditions over water to clear (i.e., 10) and cloudy or foggy conditions (i.e., 7) over land at various locations, OCTOBER 2007 NOTES AND CORRESPONDENCE FIG. 2. Comparison of the shortwave window (3.7 m) minus the longwave window (11.0 m) in the ordinate vs solar zenith angle in the abscissa. Included are 8 cloudy (solid dots) or foggy sites (solid triangles), 3 clear snow-covered locations (open diamonds), and 10 additional clear sites (open squares). The thick solid line at 5 K denotes the WNDF threshold cutoff between clear (WNDF ⱕ 5K) and cloudy (WNDF ⬎ 5K). the differences were tabulated. The numbers in parentheses indicate number of cases for each set of conditions. The cloudy cases were selected due to the inability of the old technique to correctly identify them as such. “Clear” and “cloudy or foggy” were determined in two ways. First, sites were verified by inspecting hourly surface observations. Second, to ensure that locations were not affected by mid- and high clouds, GOES visible and longwave window imagery were also used. It should be noted that foggy locations were primarily determined by the Automated Surface Observation System (ASOS) hourly observation (National Oceanic and Atmospheric Administration/Department of Defense/Federal Aviation Agency/U.S. Navy 1998). At each case (or ASOS site) a 3 ⫻ 3 FOV box was defined and a simple average of the nine FOVs for the three IR bands (3.7, 4.0, and 11.0 m) was determined. A variety of locations were made ranging from the Gulf of Mexico (“water”) and surface hourly sites along the East Coast to as far west as Kansas, south to Florida, and north to Minnesota. Spatially, these locations represent a sampling of the area the WNDF technique is expected to be the most effective, namely, the eastern half of the United States. Finally, these cases span from the beginning of September 2005–March 2006, a temporal range that goes from late Northern Hemisphere summer to early spring. Figure 2 shows the distribution of the differences for the BT3.7 ⫺ BT11 bands at various solar zenith angles between 70° and 89° for all 21 cases. It should be noted that no cases were found near the solar zenith limits. Given the predefined thresholds, it is very possible that cloudy cases very near the solar zenith angle of 89° will still be missed. The thick solid line at 5 K represents the cutoff threshold for the WNDF. The range of local zenith angles for the 21 locations vary from 32° to 57° for the clear comparisons and 37° to 57° for the cloudy cases. Nine of the cases are plotted above the WNDF 1803 threshold value. Seven of the nine are cloudy or foggy cases (solid circles or solid triangles) and two were clear snow (hollow diamonds). Eleven of the cases fell below the WNDF threshold. All but one was either clear (hollow squares) or clear snow cases. In total, Fig. 2 shows that 18 of the 21 cases were correctly identified using the WNDF. Three of the 21 cases depicted in Fig. 2 were clear sky with snow on the surface. They ranged from fresh snow (1 day old) to 4- and 7-day-old snow. Two of the three initial failures were snow cases (1- and 4-day-old snow). Both snow cases were correctly flagged with the addition of the additional thermal checks (BT3.7 ⫺ BT4.0 ⬎ 5.0 K and BT11 ⬎ 260.0 K) and the elevation check. The third failure in Fig. 2 was a low cloud case over Texas during November in which the WNDF value was less than 4.0 K. No modifications could be made that would uniquely capture this situation and not negatively affect the other 20 cases, primarily the clear cases. This particular case exposes a weakness in the technique. Of the 18 successful cases 11 were clear sites and 7 were low cloud or fog examples. A typical example of a successful clear-versus-cloudy comparison is shown in Fig. 3. This figure describes the 3.7 ⫺ 11.0 m value at different SZEN values based on GOES-12 sounder data for two sites (one clear and one cloudy) over Texas on 14 November 2005. Note the differential rate of increase for the 3.7 ⫺ 11.0-m band difference just after sunrise for the clear versus the cloudy case. (SZEN decreasing from 92.0° to 80.0°, corresponding to the nominal 1200 and 1300 UTC time periods.) For the eight cloudy locations the average 3.7 ⫺ 11.0 m value is 8.04 K, where the maximum difference is 16.6 K and the minimum difference is 3.8 K. For all (10) clear cases (not including clear where the ground is covered with FIG. 3. Comparison of clear (dashed) vs low cloud or fog (solid) difference for the 3.7- and the 11-m bands aboard the GOES-12 sounder over TX on 14 Nov 2005. Along the abscissa is the solar zenith angle (deg) and the ordinate is the temperature difference (K). At each location a 3 ⫻ 3 FOV box was defined and a simple average of the nine FOVs for the two IR bands (3.7 and 11.0 m) was determined for each time period. 1804 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY FIG. 4. Same as in Fig. 3, but the differences refer to the 3.7-m band minus the 4.0-m band aboard the GOES-12 sounder. The sites are located in TX on 14 Nov 2005. At each location a 3 ⫻ 3 FOV box was defined and a simple average of the nine FOVs for the two IR bands (3.7 and 4.0 m) was determined for each time period. snow, i.e., clear snow), the average difference is 2.1 K. For these 10 clear cases the range of difference is 3.3– 0.9 K. When the three “clear snow” sites are added, the average difference increases to 2.8 K (6.6-K maximum difference and 3.5-K minimum difference for clear snow sites only). Using this distribution, a 3.7 ⫺ 11.0 m value of 5 K was defined as a threshold to delineate clear from cloudy scenes as a first step in this technique. It should be noted that the 3.7- and 11.0-m difference (WNDF) was independent of local zenith angle. With a threshold of 5 K for the WNDF 3 of the 21 cases or locations failed to be correctly identified as either clear or cloudy. Therefore, a second test was included. Figure 4 details the comparison between the 3.7–4.0-m band and SZEN for the same case as in Fig. 3. Similar to the WNDF, the 3.7–4.0-m bands difference is greater for a cloudy location (5.2 K for this site) than for a clear example (2.4 K). For each of the cloudy cases (except the one cloudy failure noted above, 2.4 K), both the WNDF and the 3.7- and 4.0-m bands (SWNDF) difference were greater than 5.0 K for the first GOES sounder time period after sunrise. The reverse was true for the clear cases with the exception for the locations that included fresh snow (4 days old or less). For these locations the WNDF was greater than 5.0 K, but the SWNDF was less than 5.0 K. By adding this additional check, the remaining two clear snow cases were correctly flagged. It should be noted that, typically, for the 21 cases no more than two sites were tested in the “zone of interest” (89.0° ⬍ SZEN ⬍ 70.0°). A more rigorous approach would be to investigate the thresholds at numerous locations or sites for varying SZENs and note the threshold differences. Although not performed, it is assumed that as one more closely approaches SZEN ⫽ 89° the threshold difference criteria for Eqs. (1) and (2) will break down. But for all 21 cases, with the exception VOLUME 24 of the one snow case noted above, the defined thresholds in this study for both the WNDF and BT3.7 ⫺ BT4.0 were satisfactory. After the SIMDIF was included in the cloud detection subroutine for the GOES sounder cloud (Schreiner et al. 2001) processing at the University of Wisconsin— Madison Cooperative Institute for Meteorological Satellite Studies (CIMSS), it was found that an elevation/ terrain-type check was also required, as well as an additional thermal check [11.0 m ⬎ 260.0 K, Eq. (3) above]. The additional thermal check helped in detecting “old” snow (⬎1 day). The elevation/terrain-type check assisted in discriminating between low cloud/fog and clear-sky and arid scenes during the late fall and early spring in mountainous regions. As was noted earlier when these tests were applied to the three failing cases of the original 21 cases, 2 of the 3 failures were correctly identified. 3. Case studies a. 9 March 2006 (cloud mask only) Figures 5a–d detail an example comparing the GOES sounder cloud mask with (labeled “NEWMSK”) and without (labeled “OLDMSK”) the SIMDIF for 4-hourly time periods (1246–1546 UTC) on 9 March 2006. This test was applied to GOES-12 sounder data covering the eastern portion of the United States. Of interest is the cloud cover at two locations (Fargo, North Dakota, and Bemidji, Minnesota) corresponding to the gray and white dots, respectively, within the white and stippled ovals. At 1246 UTC (Fig. 5a) both the NEWMSK and the OLDMSK are correctly indicating cloud for both surface locations, as is indicated in Table 1. The SZEN at this time is greater than 89°; therefore, the SIMDIF does not affect the region within the stippled oval. The 1346 UTC time period shows a difference between the NEWMSK and OLDMSK, with the NEWMSK detecting cloud at both Fargo and Bemidji, while OLDMSK indicates cloud only at Bemidji, which upon examination of the longwave window image (top right) is determined to be high-level cloud. The visible image for this time period denotes cloudy conditions for both locations and is supported by the surface reports for the same time period. It appears the NEWMSK is better able to identify clouds in northern Minnesota and North Dakota than the OLDMSK. At 1446 UTC once again the OLDMSK is apparently only detecting the upper-level cloud (see the longwave window image), while the NEWMSK is able to identify both the high and low cloud deck in the region of Bemidji and Fargo. Surface observations for this time re- OCTOBER 2007 NOTES AND CORRESPONDENCE 1805 FIG. 5. (a) A comparison of the cloud mask (lower left) with the new simple difference technique and (lower right) without for 1246 UTC 9 Mar 2006. (top left) The GOES-12 sounder visible band (0.65 m) and (top right) is the longwave window band (11.0 m). The dark gray dot (located in the white and stippled ovals) is the location of Fargo, ND, and the white dot (also in the white and stippled ovals) is the location of Bemidji, MN. The solid lines represent SZEN ⫽ 89° (white) and SZEN ⫽ 70° (orange). (b) Same as in (a), but at 1346 UTC. (c) Same as in (a), but at 1446 UTC. (d) Same as in (a), but at 1546 UTC. veal that there may be an extensive low cloud deck passing over both surface sites in addition to high cloud over Bemidji. At 1546 UTC (Fig. 5d) the NEWMSK and OLDMSK are in agreement again. By 1546 UTC the SZEN is less than 70° within the oval of interest and the SIMDIF is not applicable. The time surface reports indicate that Bemidji is still under low clouds and this situation is captured by both cloud mask versions. However, the cloud cover at Fargo has cleared off, although haze is reported. The cloud masks show that Fargo is right on the edge of what is apparently a low cloud deck. Closer investigation of the visible image reveals that the highly reflective region over Fargo is in fact snow. This feature is confirmed in subsequent time periods (visible images not shown). For this particular case the SIMDIF more accurately depicts the cloud mask for the northern Minnesota and North Dakota region using the GOES sounder radiance information. Tables 2a,b refer to the average 3 ⫻ 3 brightness temperatures based on the observed GOES-12 sounder radiance data at Fargo and Bemidji, respectively. This table details the differences (WNDF and BT3.7 ⫺ BT4.0), the SZEN and BT11 used in the SIMDIF. At both sites for both time periods (1346 and 1446 UTC) all four tests, including the two difference thresholds, are seen to indicate clouds, in this case low clouds. One of the weaknesses of the technique is also observed in this case study. By 1446 UTC additional “cloud” is observed over the extreme eastern Colorado/ western Nebraska region. In higher elevations solar reflectance in the 3.7- and 4.0-m bands is locally high in clear scenes, even when snow is not present. An increase in solar reflectance is a result of barren vegetation at this elevation during the late winter early spring time frame in this region. Dead vegetation, especially at high elevations, tends to demonstrate similar thresholds 1806 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY VOLUME 24 TABLE 1. ASOS hourly observations for Fargo, ND (KFAR), and Bemidji, MN (KBJI), from 0955 to 1755 UTC (approximately 4:00 to 12:00 P.M. local time) 9 Mar 2006 (2006068). The remaining column labels are defined as follows. The times of the observation are in UTC. WX, with respect to ASOS, can be defined as a visibility obstruction and is limited to clear (blank), fog (F), haze (H), and freezing fog (IF). WX, again with respect to ASOS, can refer to certain weather types such as rain (R) and snow (S). Temperature (T) and dewpoint (TD) in K. Visibility (VIS) in km. C refers to cloud cover, where 0 is clear, 1 is scattered, 2 is broken, and 3 is overcast. CIGH and ZCL1 are the height of the ceiling and lowest cloud base, respectively, in km. A.M. ID State Day UTC WX T TD VIS C CIGH KFAR KFAR KFAR KFAR KFAR KFAR KFAR KFAR KFAR ND ND ND ND ND ND ND ND ND 2006068 2006068 2006068 2006068 2006068 2006068 2006068 2006068 2006068 0953:00 1053:00 1153:00 1253:00 1353:00 1453:00 1553:00 1653:00 1753:00 F F F F F F H 271.5 272.0 271.5 270.9 271.5 272.0 273.7 275.9 277.0 270.4 270.4 269.8 269.8 270.4 270.4 270.9 270.4 270.4 4.8 6.4 8.0 8.0 4.8 6.4 9.7 12.9 14.5 3 3 3 3 3 3 0 0 0 0.64 0.70 0.70 0.70 0.70 0.70 0.00 0.00 0.00 ID KBJI KBJI KBJI KBJI KBJI KBJI KBJI KBJI KBJI State MN MN MN MN MN MN MN MN MN Day 2006068 2006068 2006068 2006068 2006068 2006068 2006068 2006068 2006068 UTC 0955:00 1055:00 1155:00 1255:00 1355:00 1455:00 1555:00 1655:00 1755:00 WX T 272.0 272.0 272.0 272.0 272.0 273.2 273.2 273.2 273.2 TD 270.4 270.4 270.4 270.4 270.4 269.3 269.3 269.3 270.4 VIS 16.1 16.1 16.1 16.1 16.1 16.1 16.1 16.1 16.1 C 3 3 3 3 3 3 3 3 3 CIGH 0.58 0.52 0.52 0.52 0.52 0.46 0.40 0.40 0.40 for the WNDF and BT3.7–BT4.0 as low clouds at lower elevations (Ackerman et al. 1998). The SIMDIF will fail in these instances because the 5-K threshold is surpassed. The region of interest is below the elevation threshold (999 m) used in the logic, and therefore cloud is being incorrectly identified. b. 9 May 2006 (cloud mask and cloud-top pressure) A second case over Texas and the southeastern United States also demonstrates the effectiveness of the WNDF technique. In this case the SIMDIF was incorporated in the GOES sounder Cloud Height Program (Schreiner et al. 2001). This cloud height processing C ZCL1 C ZCL1 algorithm is a two-step process. The first step defines a cloud mask (where the SIMDIF is applied). The second step then will determine a cloud-top pressure only if a FOV has been determined to be cloudy. The effect of the SIMDIF is shown for the nominal time periods from 0946 to 1247 UTC 9 May 2006 using the GOES-12 sounder data in Figs. 6a–d, which are essentially the cloud mask augmented with cloud-top pressures. Figure 6a (0946 UTC) shows the cloud coverage approximately 1 h prior to sunrise along the east coast of the United States with the exception of the extreme northern portion of the east coast. The synoptic conditions include a low pressure system located over the Central Plains generating some convective activity over eastern Kansas, Missouri, and eastern portions of Iowa. TABLE 2a. Hourly brightness temperatures based on GOES-12 sounder radiances for band 8 (11.0 m, BT11), band 17 (4.0 m, BT4.0), and band 18 (3.7 m, BT3.7) for six consecutive hourly time periods (time in UTC) on 9 Mar 2006 for Fargo, ND. The visible reflectance (VIS in %), solar zenith angle (SZEN), and difference between the shortwave window and the longwave window (WNDF) and the shortwave bands (BT3.7–BT4.0 in K) are shown in the rightmost four columns. UTC BT11 BT4.0 BT3.7 VIS SZEN WNDF BT3.7 – BT4.0 1146:00 1246:00 1346:00 1446:00 1546:00 1646:00 265.88 265.82 266.58 269.30 270.77 273.84 262.41 261.56 270.17 278.46 272.28 277.09 261.67 261.03 283.15 292.92 276.85 281.78 0 0 6 15 24 25 102.25 91.97 81.89 72.40 64.01 57.26 ⫺4.21 ⫺4.79 16.57 23.62 6.08 7.94 ⫺0.74 ⫺0.53 12.98 14.46 4.57 4.69 OCTOBER 2007 1807 NOTES AND CORRESPONDENCE TABLE 2b. Same as in Table 2a, but the location coincides with Bemidji, MN. UTC BT11 BT4.0 BT3.7 Vis SZEN WNDF BT3.7 – BT4.0 1146:00 1246:00 1346:00 1446:00 1546:00 1646:00 263.61 253.08 262.48 263.91 263.79 263.99 260.42 254.55 263.05 279.22 285.64 292.26 260.39 255.05 269.37 295.35 304.32 313.99 0 1 6 20 29 38 101.01 90.84 80.92 71.64 63.51 57.12 ⫺3.22 1.97 6.89 31.44 40.53 50.00 ⫺0.03 0.50 6.32 16.13 18.68 21.73 There are also convective storms over the Florida Peninsula. The southeastern portion of the country is overcast due to low-level clouds and/or fog throughout the time period 1000–1500 UTC. These conditions are indicated in Table 3. At 1046 UTC (Fig. 6b), the sun is just above the horizon for the eastern coast of the United States. When this time period is compared to the previous image (Fig. 6a), there appears to be a clear region encompassing both North and South Carolina in the FIG. 6. (a) A comparison of the derived CTP image based on GOES-12 sounder radiance data (bottom left) with and (bottom right) without the new simple difference technique at 0946 UTC 9 May 2006. The color levels refer to various levels of CTP (hPa), and the gray shades in the CTP images indicate cloud-free regions. (top left) The GOES-12 sounder visible band (0.65 m) and (top right) the longwave window band (11.0 m). The four square dots (white) refer to the location of the surface observation sites (see Table 3) used to verify the existence of low cloud. The surface observations sites are Jacksonville, NC; Albany, GA; Houston, TX; and Corsicana, TX. The solid lines represent SZEN ⫽ 89° (white) and SZEN ⫽ 70° (orange) (b) Same as in (a), but at 1046 UTC. The white dot indicates the location of Jacksonville. (c) Same as in (a), but at 1146 UTC. The white dot indicates the location of Albany. (d) Same as in (a), but at 1247 UTC. The white dot indicates the location of Houston. 1808 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY VOLUME 24 TABLE 3. Surface hourly reports for the four locations on 9 May 2006 (day 2006129) noted in Figs. 6a–d. KNCA is the ID for Jacksonville, NC; KABY is Albany, GA; and KHOU is Houston, TX. The remaining column labels are the same as defined in Table 1. ID State Day UTC WX T TD VIS C CIGH C ZCL1 KNCA KNCA KNCA KNCA KNCA KNCA NC NC NC NC NC NC 2006129 2006129 2006129 2006129 2006129 2006129 0956:00 1056:00 1156:00 1256:00 1356:00 1456:00 F F F 285.9 285.9 286.5 287.0 288.7 289.3 284.3 284.3 284.3 283.7 283.7 283.7 8.0 9.7 9.7 11.3 11.3 11.3 2 2 2 2 2 2 0.30 0.30 0.30 0.30 0.61 0.61 3 2 2 1.22 0.61 0.91 2 3 3.05 0.91 ID KABY KABY KABY KABY KABY KABY KABY State GA GA GA GA GA GA GA Day 2006129 2006129 2006129 2006129 2006129 2006129 2006129 UTC 0953:00 1053:00 1153:00 1225:00 1253:00 1353:00 1453:00 WX F F F F F F H T 291.5 291.5 292.0 292.0 292.0 292.6 293.2 TD 290.9 290.4 290.4 290.9 290.4 290.4 290.4 VIS 4.8 4.0 4.0 4.8 4.8 4.8 6.4 C 3 3 3 3 3 3 3 CIGH 0.12 0.12 0.12 0.12 0.15 0.15 0.21 C ZCL1 ID KHOU KHOU KHOU KHOU KHOU KHOU State TX TX TX TX TX TX Day 2006129 2006129 2006129 2006129 2006129 2006129 UTC 0953:00 1053:00 1153:00 1253:00 1353:00 1453:00 WX F T 296.5 297.0 297.0 298.2 299.3 300.4 TD 295.4 295.9 295.9 296.5 296.5 296.5 VIS 9.7 11.3 8.0 8.0 8.0 9.7 C 2 2 2 2 2 2 CIGH 0.46 0.61 0.34 0.43 0.49 0.70 C 1 1 2 2 1 1 ZCL1 0.24 0.34 0.70 0.61 0.30 0.46 F F H H “OLDCTP” image in the lower-left-hand corner. This clear area is also observed in the “NEWCTP” (lowerright-hand corner), but the NEWCTP is not as void of clouds as the OLDCTP. Both the visible imagery for this time period (upper-right-hand corner) and the surface observation for Jacksonville, North Carolina (the white dot in Fig. 6b), at 1100 UTC strongly contradict the OLDCTP and also indicate that the NEWCTP is not cloudy enough either. The primary reasons for the lack of cloudiness in the NEWCTP version of the cloud-top pressure (CTP) are twofold. First, the difference between 3.7- and 11.0-m bands falls below the criteria threshold (i.e., 5 K). A second reason for the failure of the technique to correctly detect cloud is due to the terrain elevation limitation for the SIMDIF. Table 4a (similar to Table 2, but that the locations are Jacksonville; Albany, Georgia; Houston, Texas; and Corsicana, Texas; for 9 May 2006) does show the SIMDIF correctly detecting fog at Jacksonville at 1046 UTC. By 1146 UTC (Fig. 6c) the sun is far enough above the horizon that in the visible band, clouds and clear regions are distinctly visible as far west as Texas and Wisconsin. Despite these conditions, low clouds over Georgia and Alabama are not properly detected in the OLDCTP. Based on comparisons to the visible imagery for this time period and comparisons to surface observations of clouds at Albany (see Table 3 for details), the NEWCTP correctly identifies low clouds over this region. And, at 1247 UTC the trend of the OLDCTP not detecting low clouds near the terminator continues to move westward (Fig. 6d). For this time period all of eastern Texas is devoid of clouds for the OLDCTP, while the NEWCTP more correctly defines the cloudiness over this region based on comparisons with the visible image for the same time period and the surface observation at Houston (Table 3). In TABLE 4a. Same as Table 2a, but for 9 May 2006. The surface location coincides with Jacksonville, NC. UTC BT11 BT4.0 BT3.7 VIS SZEN WNDF BT3.7 – BT4.0 0946:00 1046:00 1146:00 1246:00 1346:00 1446:00 276.14 279.16 278.82 277.10 278.74 279.77 274.42 279.54 284.20 286.89 294.97 296.99 274.62 285.16 293.28 298.49 309.76 311.52 0 5 12 24 33 39 93.14 81.43 69.29 56.80 44.67 32.80 ⫺1.52 6.00 14.46 21.39 31.02 31.75 0.20 5.62 9.08 11.60 14.79 14.53 OCTOBER 2007 1809 NOTES AND CORRESPONDENCE TABLE 4b. Same as in Table 4a, but for Albany, GA. UTC BT11 BT4.0 BT3.7 Vis SZEN WNDF BT3.7 – BT4.0 0946:00 1046:00 1146:00 1246:00 1346:00 1446:00 286.52 285.82 286.26 287.34 287.49 286.01 283.44 283.53 288.94 291.99 294.31 296.20 283.90 284.58 294.76 298.87 302.60 306.38 0 2 12 22 32 47 98.83 86.93 74.51 61.66 48.83 35.67 ⫺2.62 ⫺1.24 8.50 11.53 15.11 20.37 0.46 1.05 5.82 6.88 8.29 10.18 this case Table 4b does point out a weakness of the SIMDIF. Note the 1046 UTC GOES-12 sounder observations and differences. At Albany with the SZEN ⫽ 86.93°, the SIMDIF does not accurately detect the observed fog. This problem is rectified in the following time period. As in Table 4b, Table 4c once again points out a weakness. For the first time period immediately after sunrise (SZEN ⬎ 83°) at the Houston location the SIMDIF fails to detect fog. Although for the following time period (75° ⬎ SZEN ⬎ 70°) fog is correctly identified. Despite these very specific shortcomings, by incorporating the SIMDIF a more complete definition of this low cloud is delineated (NEWCTP). Figure 6f is included to show that 1) the two cloud product versions once again converge on the same answer once the SZEN is less than 70° and 2) the cloudiness for the southeastern portion of the United States is continuous for the six time periods included in this particular case. 4. Summary and future work A technique has been developed and tested to detect low-level clouds and fog just after sunrise over the eastern portion of the United States, based on analysis of 21 cases from mid-September 2005 to early March 2006 using GOES sounder radiance data. Frequently these clouds are not properly flagged as the nighttime cloud mask is replaced with a daytime version of the mask at large solar zenith angles. Low clouds and fog just after sunrise are missed as they are not as reflective in the visible band of the GOES sounder as deep convective clouds. The SIMDIF uses the brightness temperature differences between the longwave window (11.0 m), the shortwave window (3.7 m), and also employs another shortwave window (4.0 m) for solar zenith angles between 89.0° ⬍ SZEN ⬍ 70.0°, and surface elevations less than 999 m. The strengths in this technique lie in its ability to identify low-level water clouds or fog over low, flat terrain over the eastern portion of the conterminous United States (CONUS). Testing of the SIMDIF was not performed over the western sections of the CONUS because of the terrain elevation limitations. This technique has been shown to be effective during the late fall, winter, and early spring seasons. A weakness of this method is mistakenly identifying low cloud when there are clear skies over fresh snow and dead vegetation, especially at high elevations. In summary, for both the cloud mask and the CTP case study the SIMDIF was able to more correctly identify low-level cloudiness and fog that up to now was not identified. The SIMDIF is currently being applied to the GOES sounder cloud product algorithm from CIMSS. Routine hourly process incorporating this technique has shown a significant improvement in the identification of low cloud and fog. The goal is to apply this technique to the GOES sounder temperature/moisture retrieval algorithm. (Ma et al. 1999; Schmit et al. 2002). (In fact, the latest iteration of this processing system generates temperature/moisture products and cloud products, CTP, and the effective cloud amount from one processing system.) TABLE 4c. Same as in Table 4a, but for Houston, TX. UTC BT11 BT4.0 BT3.7 Vis SZEN WNDF BT3.7 – BT4.0 0946:00 1046:00 1146:00 1246:00 1346:00 1446:00 289.88 292.80 292.27 292.38 293.34 294.23 290.38 291.28 290.03 295.59 299.69 303.69 290.95 291.71 292.28 301.11 306.28 310.51 0 0 3 9 16 17 107.41 95.78 83.44 70.55 57.52 44.09 1.07 ⫺1.09 0.01 8.73 12.94 16.28 0.57 0.43 2.25 5.52 6.59 6.82 1810 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY Although the SIMDIF was not tested for cases near sunset (because none were found during the test period of 14 September 2005 and 6 March 2006 over the eastern portion of the CONUS), there is no reason to believe the SIMDIF will not work for this time period as well. By incorporating the SIMDIF into the operational production of GOES sounder products, the effectiveness of this technique near sunset will also be determined. Some experimentation using this method in a temporal mode has shown favorable results in addition to being more robust in its application. Future work along this line will continue. Acknowledgments. The authors wish to acknowledge Mr. Timothy J. Schmit, Mr. Richard A. Frey, Dr. Jun Li, Dr. W. Paul Menzel, Ms. Leanne Avila, and Mr. Thomas H. Achtor for their insightful comments and helpful suggestions. In addition, the authors wish to thank three anonymous reviewers who provided constructive criticism and helpful remarks. The Space Science Engineering Center supplied the data for this study. Funding for this work was provided by NOAA Grant NA06NES4400002. REFERENCES Ackerman, S. A., K. I. Strabala, W. P. Menzel, R. A. Frey, C. C. Moeller, and L. E. Gumley, 1998: Discriminating clear-sky from clouds with MODIS. J. Geophys. Res., 103, 32 141– 32 158. Baum, B. A., R. A. Frey, G. G. Mace, M. K. Harkey, and P. Yang, 2003: Nighttime multilayered cloud detection using MODIS and ARM data. J. Appl. Meteor., 42, 905–919. Bayler, G. M., R. M. Aune, and W. H. Raymond, 2000: NWP cloud initialization using GOES sounder data and improved modeling of nonprecipitating clouds. Mon. Wea. Rev., 128, 3911–3920. Daniels, J. M., T. J. Schmit, and D. W. Hillger, 2001: GOES-11 Science Test: GOES-11 imager and sounder radiance and product validations. NOAA Tech. Rep. NESDIS 103, U.S. Department of Commerce, Washington, DC, 49 pp. d’Entremont, R. P., 1986: Low and midlevel cloud analysis using nighttime multispectral imagery. J. Climate Appl. Meteor., 25, 1853–1869. Ellrod, G. P., 1995: Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Wea. Forecasting, 10, 606–619. VOLUME 24 ——, 2006: Evaluation of Moderate-Resolution Imaging Spectroradiometer (MODIS) shortwave infrared bands for optimum nighttime fog detection. Preprints, 14th Conf. on Satellite Meteorology and Oceanography, Atlanta, GA, Amer. Meteor. Soc., CD-ROM, P3.24. Eyre, J. R., 1984: Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery. Meteor. Mag., 113, 266–271. Hillger, D. W., T. J. Schmit, and J. M. Daniels, 2003: Imager and sounder radiance and product validations for the GOES-12 science test. NOAA Tech. Rep. 115, U.S. Department of Commerce, Washington, DC, 70 pp. Hunt, G. E., 1973: Radiative properties of terrestrial clouds at visible and infrared thermal window wavelengths. Quart. J. Roy. Meteor. Soc., 99, 346–369. Kleespies, T. J., 1995: The retrieval of marine stratiform cloud properties from multiple observations in the 3.9-m window under conditions of varying solar illumination. J. Appl. Meteor., 34, 1512–1524. Lee, T. F., F. J. Turk, and K. Richardson, 1997: Stratus and fog products using GOES-8–9 3.9-m data. Wea. Forecasting, 12, 664–677. Ma, X. L., T. J. Schmit, and W. L. Smith, 1999: A nonlinear physical retrieval algorithm—Its application to the GOES-8/9 sounder. J. Appl. Meteor., 38, 501–513. Menzel, W. P., and J. F. W. Purdom, 1994: Introducing GOES-I: The first of a new generation of Geostationary Operational Environmental Satellites. Bull. Amer. Meteor. Soc., 75, 757– 782. ——, F. C. Holt, T. J. Schmit, R. M. Aune, A. J. Schreiner, G. S. Wade, and D. G. Gray, 1998: Application of GOES-8/9 soundings to weather forecasting and nowcasting. Bull. Amer. Meteor. Soc., 79, 2059–2077. National Oceanic and Atmospheric Administration/Department of Defense/Federal Aviation Administration/U.S. Navy, 1998: ASOS user’s guide. NOAA/DOD/FAA/U.S. Navy, 72 pp. Saunders, R. W., and K. T. Kriebel, 1988: An improved method for detecting clear sky and cloudy radiances from AVHRR data. Int. J. Remote Sens., 9, 123–150. Schmit, T. J., W. F. Feltz, W. P. Menzel, J. A. Jung, A. P. Noel, J. N. Heil, J. P. Nelson III, and G. S. Wade, 2002: Validation and use of GOES sounder moisture information. Wea. Forecasting, 17, 139–154. Schreiner, A. J., T. J. Schmit, and W. P. Menzel, 2001: Trends and observations of clouds based on GOES sounder data. J. Geophys. Res., 106, 20 349–20 363. Sutherland, R. A., 1986: Broadband and spectral emissivities (2– 18 m) of some natural soils and vegetation. J. Atmos. Oceanic Technol., 3, 199–202.