Continuous and Discontinuous Change
advertisement

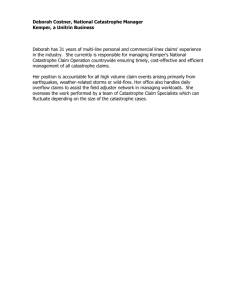
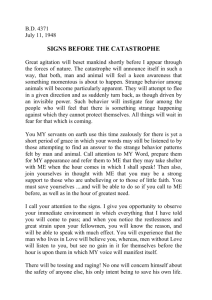
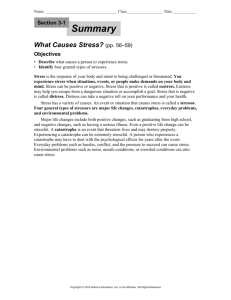
This file was created by scanning the printed publication. Errors identified by the software have been corrected; however, some errors may remain. Continuous and Discontinuous Change in a Southwestern Woodland Donald A. Jameson 1 Abstract - The traditional view of ecosystems stressed by man's activities is that a given stress will result in a given plant community equilibrium, i.e., there is a single equilibrium state for any stress regime, regardless of the previous state. This is the essence of a single steady state system, which allows for only "smooth" changes. Much has appeared in some ecological literature lately about alternative models that allow discontinuous changes. The simplest such model is a fold catastrophe. In this model, the response to some extreme value of a control variable is a single stable steady state. The response at the opposite extreme has another stable steady state. In between there is a zone where either state can be considered a stable steady state (along with some unstable steady states); the particular equilibrium state depends on the originating extreme state. The next most complex multiple steady state model is the cusp catastrophe. Whereas the fold model requires a "jump", i.e., an outside influence, to move from one steady state to another, the cusp model also allows a "smooth return" along one control axis that does not require an outside influence. The Southwestern pinyon-juniper woodland has many examples that appear to fit this last model - with both discontinuous and continuous change introduced by combinations of Climate, fire, grazing and wood harvesting. The cusp model also may alleviate concerns of those who are unwilling to depart from the earlier paradigm that time and succession will cure all ills. The relationship of the appropriate equilibrium states to climatic stress and activities of mankind are a fruitful area of study. SINGLE VERSUS MULTIPLE EQUILIBRIUM STATES appropriate, random fluctuations may alter the current state but the system will return to the predetermined state for any given stress level. The migration to a stress-free steady state, once the stress is removed, may take a longer time than can be allowed for study. Alternative study techniques may involve a space-for-time exchange, i.e., using ecological relationships displayed in space as a surrogate for ecological relationships that change in time. In fact, it may not be discemable whether a phenomena is occurring in space or in time. "When a moving ecological community reaches an obselVer" might be the same question as "when a moving obselVer reaches the ecological community" . Although there are dangers in making assumptions about ecological patterns when the underlying processes are not obselVable or controllable (Cale et al. 1989), it is certainly tempting to do so when the time required to change exceeds the life of the obselVer. A traditional view of ecology is that a given stress to an ecological community will result in a given community equilibrium. In range management, for example, it has been assumed that there is a single equilibrium state (called range condition) for any grazing prescription, regardless of whether the previous condition was higher or lower. This is the essence of the concept of a single steady state system. When any outside stress is removed, the system migrntes to a single stress-free condition, which may be known by some term such as "potential natural vegetation". If the single steady state concept is 1 Donald A. Jameson is Professor Emeritus, Colorado State University, and USDA Forest Service, retired. He currently resides at Sedona, AZ. 137 ELEMENTARY CATASTROPHE THEORY In contrast to the traditional view of single steady states, multiple steady state concepts allow more than one state of the system to result from a given input or stress (Zeeman 1976). The resultant steady state for any stress may be determined by a previous state, rather than being independent of any previous state as in the single steady state concept. A classic example in range management is the California annual grasslandlStipa pulchra. Range managers have been forced to recognize that the Stipa pulchra communities of pre-European settlement will not be replaced through natural succession, and that the potential steady state, even if grazing is eliminated, is now an annual community dominated by introduced Mediterranean annuals. However, this has been commonly taught in range management classes as perhaps the single ~ception to a single steady state concept of range condition Recently there has been considerable attention in the literature (reviewed by Laycock 1991) of many interpretations of multiple steady states observed in nattIml vegetation systems, but explicit system models that are subjectJo control and statistical analyses are rare. However, Jameson (1991) reported experimental results that contained at least a partial test of a hypothesis that a cooland wann-season grass community possessed multiple steady state properties. Occam's razor teaches that the simplest usable model should be used to explain observed results, and the simplest model of multiple steady state systems is the fold catastrophe (Zeeman 1976). A drawing of a fold is simple, it is only the proof that it is the simplest multiple steady state model that is difficult. Even simplistic graphics programs can be induced to draw an appropriate fold. In the fold model, the response to some extreme value of a control variable has a single stable steady state. The response at the opposite extreme has another stable steady state. In between there is a zone where either state can be considered a stable steady state (along with some unstable steady states). If we should sample for some measurement variable along the control axis (such as percent of vegetation made up of pre-European species), we would expect to fInd a low variance at the two extremes of the fold and a high variance in the middle zone, resulting in a cloud of observations in the multiple equilibrium region of the system In fact, the high variance might obscure the fact that there are steady states of any kind, and we might assume that we have chaos. In the annual grassland example, the percentage of vegetation made up of pre-European species is a simple index of community composition. In other ecosystems, other indices may be more appropriate. Some nominees for approaches to the index question include species richness indices, patch connectivity, diversity indices, fractal dimensions, phase transition parameters, discontinuity detection algorithms, edge detection algorithms, changes in spatial autocorrelations, and others. An important consideration of the study of such systems is their equilibria, i.e., to what states does the system migrate because of its own properties. Some extremely helpful aids in addressing the concept of equilibria are found in the area of catastrophe theory within the definition: Elementary catastrophe theory is the study of how the equilibria of a dynamic system changes as the control parameters change. We will now review various catastrophe manifolds. These manifolds are system response surfaces that show response of state variables x resulting from application of various controls u. Although the ~stem dynamics as it returns to equilibrium has a time dimension, the time trace of the system is not explicitly shown However, if the system is near the equilibria and the changes in controls are small, the trace of system dynamics is nearly the same as the equilibria manifold. The basic concepts of both adaptive management and mathematical catastrophes were developed in the 1960' s. However, it was not until a decade later that ~se two concepts were sufficiently digested to be incorporated into studies of ecological systems (Zeeman 1976, Jones 1977, Bar-Shalom and Tse 1976), and were combined even later (Casti 1980). The theoretical properties of systems that can be managed incrementally are well known (Bar-Shalom and Tse 1976) and have been discussed in tenns of biological and ecological systems (Jameson 1986). It has been well documented that fIxed schedule plans for management of ecological systems are not satisfactory, but again it was not until recently that there was sufficient understanding so that basic causes of failure of fIxed schedule systems could be reasonably well discussed (Walters 1986). Traditional approaches to analyses of uncertain systems emphasize the importance of using a stochastic model. However, a stochastic model is not always necessary unless model equilibria demonstrate properties of certain of the catastrophe classes. Several environmental systems have been modeled as fold catastrophes (McMurtrie and Wolf 1983, Noy-Meir 1982, Walker and Noy-Meir 1982, Walker et al. 1981). Jones (1977) presented a model of spruce budworm outbreaks as a cusp catastrophe. Loehle (1985) published a theoretical paper on application of catastrophe theory to grazing, but no concrete examples were included. Johnson and Parsons (1985) studied an example pasture system to collect data on a fold catastrophe response. Many earlier authors seemed tentative in suggesting the occurrence of a cusp, but Lockwood and Lockwood (1993) explicitly applied catastrophe theory to weather-driven grasshopper population dynamics with a detailed analysis of historical data that demonstrated the properties of a cusp. These published analyses have been a posteriori; except for the limited analyses of Jameson (1991) there has not yet been a published result that has examined the biological response of an environmental system to an applied treatment to examine a cusp catastrophe hypothesis. 138 A FOLD CATASTROPHE EXAMPLE A CUSP CATASTROPHE EXAMPLE From elementaty algebra, the equation The concept of cusp catastrophes in ecosystem management will be introduced by an example of a woodland - grassland transition. 1YPically, one would expect a shift toward grassland species and away from woodland species with fire or wood harvesting, and vice versa with heavy grazing. These reversals seem entirely reasonable and have been frequently observed (see Arnold, et al. (1964) and Jameson and Reid (1965) for fire and post-Columbian grazing effects, Samuels and Betancourt (1982) for prehistoric wood harvest effects). Under xeric conditions, tree species may not become established even with grazing and cessation of fire (Cinnamon 1988). More mesic climatic conditions may be required for this shift to occur. On the other hand, the xeric climatic conditions and limestone soils typical of the southern Little Colorado River basin may not produce enough grass fuel for fire to be a factor (Clary and Jameson 1981). However, in areas with more grass fuel production, fire can be an effective deterrent to woody plant reproduction (Jameson 1962). Another situation in which fire suppression does not seem a likely factor in so-called invasions is where the sprouting Juniperus deppeana is the dominant tree species (Jameson and Johnsen 1964). Betancourt (1987) stated "distributions of pinyon and juniper species (and their associations) should be considered ephememl over the past two million years ... traditionally attributed to overgrazing and fire suppression, historic invasions could also matk the current progress of continued migration, climatic fluctuation, or recovery from historic and prehistoric woodcutting." These statement are supported with analysis of pack rat middens over the longer time periods (Van Devender et al. 1987), and fire scar and tree growth chronologies over a period of a few hundred years (Swetnam and Betancourt 1990). Jameson (1969) analyzed the summer and winter precipitation ratios across Arizona, but Webb and Betancourt (1992) have indicated that even the summer-winter ratios may be non-stationary because of variations in the Southern Oscillation u =x + x + x (1) is a cubic function that yields a single value of u for each value of x. However, the equation 3 2 x3 + x2 + X =U (2) yields 3 values of x for each value of u. This equation is the simplest of the elementary catastrophes, or a fold catastrophe (Fig. 1). The second derivative or inflection point of this equation occurs at 6x + 2 x =0 (3) =-113 (4) By subtracting the value of x of Equation (4) from the values of x in Equation (2), the manifold equation can be simplified to _x3 + X + U = 0; (5) Equation (5) is the simplest eqUfttion that can represent the discontinuous properties of a catastrophe. Setting the first derivative of Equation (5) to 0 yields x = 1/3; these points locate discontinuities that are one of the catastrophe properties. Between these points, there are three solution values of x; the upper and lower values represent stable equilibria and the intermediate value represents an unstable equilibrium. As control is increased or decreased across one of these discontinuity points, the equilibrium "jumps" to the alternative equilibrium. The studies reviewed by Laycock (1991) could be perceived as a linked series of fold catastrophes, i.e., with discontinuities between pairs of seveml states of the system However, the behavior of the system is thereby constrained by these discontinuities, and allows no "smooth return" to another state as would be necessruy for many ecological situations. (EI Nino). )( Stabiltty zone 1.4 The complex situation of fire, grazing, wood cutting, and climatic shifts described in the preceding three paragraphs call for a complex model to deal with the combinations. Organizing information around any model has certain implications about how phenomena are expected to behave, and Figure 2 is an attempt to include all of these phenomena in a single model . The basic "faSt" controls (Ul) considered will be fire, grazing and wood harvest. As demonstrated in Figure 2, there is also a second or "slow" control U2 dealing with climatic pattem The front (folded) edge of Figure 2 represents four of five properties of a catastrophe model listed by Lockwood and Lockwood (1993): II en 1.0 c: 0 0.6 I... 0.2 Co '0 CIJ :::J -0.2 -0.6 "i -1.0 > -1.4 Stability mne -2 -1 o 1 2 1. Value of control u Figur~ 1. - A fold catastrophe to depict discontinuous changes In response x as a result of a management control u. 139 Modality: the system tends to be either in a tree dominated state or in a grass dominated state; intermediate values cannot be reached directly along the grazing season axis and tend not to occur. WOODLAND solutions for a given input, it may not be possible to predict what the response will be without knowing the ecological history of the ecological system. RISK AND CATASTROPHES In Figure 3, the elementary fold catastrophe of Figure 1 is tilted so that the greatest benefits are shown near the upper discontinuity~ this figure represents those environmental management situations where benefits can be increased, up to a point, by inc~ing the input control. If the system were deterministic, there would be no difficulty with such a management strategy. However, if the system is stochastic, a given control may result in either less than maximum benefits or a shift beyond the upper discontinuity to the lower stability zone. Once the system is in the lower stability zone, the original benefits cannot be restored by reversing the control. Figure 2. - A cusp catastrophe to depict a combined discontinuous change in a pinyon-juniper woodland. Taken from Jameson (1987). 2. Inaccessibility: the infolded region of the figure represents unstable equilibria which will not be reached by successional activity. 3. Jumps (discontinuity or catastrophe): as the controlling factor (fire versus grazing) moves toward either extreme, a point is reached where response can no longer move smoothly, the jump to a different level at this discontinuity is what gives catastrophe theory its name. 4. Hysteresis: The time path that the woodland! grassland response must make as grazing control moves to the right is different than the response as control moves to the left. The frfth property of a cusp catastrophe, divergence, is represented in a movement from the front edge toward the back edge of Figure 2. It should be emphasized that models described here, although postulated as reasonable for ecological obselVations, are only conceptual. In fact, the surface for Figure 2 was generated from: _(x3 + XU1 + U2 ) =0 ~~_#;-->",..~):--,,-,' ,, ,/' ,, ""I _'/.1 -,........ ,-"..... ,/,- /' ",/to ,,/' , ~' , , / ' , t //<::::~::~::::>/ .' ~",--, , ,I'~~ ,/' CD m Control u Figure 3. - A tilted fold catastrophe indicating the problems of managing for a maximum benefit with a discontinuous response surface. The heavy line represents the mean response with a given control u; the dashed lines indicate the response at individual sample years. (6) where x is the woodland/grassland response, UI is the "fast" control of the fire/grazing axis, and U2 is the "slow" control along the climatic axis. This equation does not represent ecological mechanism, but is the simplest mathematical form that will generate the desired surface (Jones 1977, Zeeman 1976). It should be emphasized that these model equations may contain parameters that are not readily identifiable with any known biological states or processes, and thus may not be experimentally detenninable. The algebraic model also has some other interesting properties in addition to those mentioned previously. Note that in the zone between the edges of the fold in Figure 1, the equation gives three solutions. However, for a given response and position along the response axis, there is a single input or control. Thus it may be possible to reconstruct from ecological evidence the causes leading to a particular response, but, because of the three Operationally, there are three strategies appropriate for situations depicted by Figure 3: (1) Choose a level of control U2 sufficiently left of the optimal point such that benefits never fall to the lower stability level, or (2) initiate a recovery action to lift the system performance from the lower stability zone to the upper stability zone, or (3) initiate an alternative control (UI in Fig. 2) to move the system beyond the bifurcation point so that a smooth return to the higher benefit level can be restored. 140 The same history of thought also leads us to expect that we can perceive problems and manage resources as though the response sutfaces do not contain discontinuities. Even those who insist that interesting models must be nonlinear seldom perceive that discontinuity and bifurcation is a more serious problem than the linear-in-a-neighborhood type of nonlinearity. A new approach would require that we learn to conduct experiments and use appropriate analyses that escape the old thought limitations of subdivision and continuity. As an example, we might start with resource maps. 'JYpically, such maps subdivide the world into "homogeneous" units. The nice thing about these homogeneous units is that our old models and concepts work well within the units. In fact, it is the boundaries between the map units that are the most interesting and contain the most challenges in management, as these areas are most likely to possess discontinuous responses or ecotones (Casey and Jameson 1988, Holland et al. 1991). A new resource mapping concept that emphasizes boundaries rather than homogeneous land units would at least indicate that we know were the challenging problems lie. Displays of land area based on discontinuous responses or ecotones will lead to examination of the relationship of bifurcation and multiple stability zones of one "map cell" to behavior of another map cell. Are stability zones 'contagious? If the land area represented by one map cell shifts to a lower production stability zone, will this shift be absOIbed by adjacent land areas, or will the shift spread to neatby land areas? The implications of these alternatives will cause us either to shrug off desertification and global climatic change, or to feel that desertification and global climatic collapse are inevitable. Each of these strategies has its own cost to be considered in choosing the best action The cost of strategy (1) is largely the cost of benefits foregone by operating at a conselVative level of control. The cost of strategy (2) is the cost of the recovery action The cost of strategy (3), initiation of slow control Ut, depends on waiting for the slow control to be effective, and largely results from discounting future benefits of the restored system In other cases, the best we can hope for until suitable techniques are developed is to depend on the experience and memory of human managers. Historically, human nature is such that memory selVes only those that have experienced such catastrophes in their own life, and .little wisdom is transferred to others. FUTURE DIRECTIONS • Almost any natural resource system could be perceived and modeled as a single steady state system, or conversely could be modeled as multiple steady state. However, it is not always clear that the choice of models makes any practical difference. A useful approach is to model the system both ways, then use experiments on the models to detennine if the multiple steady state properties of the model lead to management decisions that are different from those reached using single steady state assumptions. An alternative approach is to directly examine the behavior of the natural system to see if responses are such that a multiple steady state approach must be used. For some systems, the single steady state approach may lead only to management inefficiencies rather than to "catastrophes"; for other systems the consequences are more severe than mere inefficiency. If multiple steady state properties can be found experimentally, it would clearly indicate that the system cannot be managed incrementally (i.e., with a passive adaptive approach) without catastrophic results. If catastrophe conditions are not found, then a simple incremental approach will at worst lead to inefficiencies. For natural resource management, a lack of catastrophe behavior means that satisfactory management corrections could be based on obselVations of ecosystem responses without leading to ecosystem destruction. If catastrophe conditions are found, then errors in management cannot be corrected merely by reversing management direction A handicap that we must face is that most of our history of natural resource research and management is based on concepts that we can subdivide the world and conduct experiments to determine what we need to know about system behavior. Walters (1986) has nicely documented some problems that arise when the system under study cannot be subdivided, but must be " probed" in order to learn the necessary aspects of system behavior in an active adaptive management scheme. Studies in global climatic change certainly will face problems of this kind: how does one probe the world? LITERATURE CITED Arnold, 1. F., D. A. Jameson, and E. H. Reid. 1964. The pinyon-juniper type of Arizona: effects of grazing, fire, and tree control. U.S. Department of Agriculture Production Research Report 84. 23 pp. Bar-Shalom, Y.; Tse, E. 1976. Concepts and methods in stochastic control. Control and Dynamic Systems. 12: 99-172. Betancourt, J. L. 1987. Paleoecology of pinyon-juniper woodlands: summary. In: Proceedings - Pinyon-Juniper Conference; 1986 January 13-16; Reno, Nevada. Cale, W.G.; Henebry, G. M; Yeakle, J. A. 1989. Inferring process from pattern in natural communities: can we understand what we see? BioScience. 39: 600-605. Casey, R. M.; Jameson, D. A. 1988. Parallel and vector processing in landscape dynamics. Applied Mathematics and Computation 27: 3-22. Casti, J. L. 1980. Bifurcations, catastrophes and optimal control. IEEE Transactions on Automatic Control. AC-25: 1008-1011. Cinnamon, S. K. 1988. The vegetation community of Cedar Canyon, Wupatki National Monument as influenced by prehistoric and historic environmental change. M. S. Thesis, Northern Arizona University. 141 Lockwood, 1. A.; Lockwood, D. R. 1993. Catastrophe theOIY: a unified paradigm for rangeland ecosystem dynamics. Journal of Range Management. 46:282-288. Loehle, C. 1985. Optimal stocking for semi-desert range: a catastrophe theory model. Ecological Modelling. 27: 285-297. McMurtrie, R.; Wolf, L. 1983. A model of competition between trees and grass for radiation, water and nutrients. Annals of Botany. 52: 449-458. Noy-Meir, 11982. Stability ofplant-hetbivore models am possible application to savama. Ecological Studies. 42: 591-<i09. Samuels, M. L.; Betancourt, 1. L. 1982. Modeling the long-term effects of fuelwood harvests on pinyon-juniper woodlands. Environmental Management 6: 505-515. Swetnam, T. W.; BetancoUrt, 1. L. 1990. Fire-Southern oscillation relations in the Southwestern United States. Science. 249: 1017-1020. Van Devender, T. R.; Thompson, R. S.; Betancourt, 1. L. 1987. Vegetation history of the deserts of southwestern North America: the nature and timing of the Late Wisconsin-Holocene transition In: Ruddiman, W. F.; Wright, H. E., Jr, eds; North American and adjacent oceans during the late deglaciation: Boulder, Colorado, Geological Society of America, The Geology of North America, v. K-3. Walker, B. H.; Ludwig, D.; Holling, C. S;; Peterman, R. M. 1981. Stability of semi-arid savanna grazing systems. Journal of Ecology. 69: 473-498. Walker, B. H.; Noy-Meir, I. 1982. Aspects of the stability and resilience of savanna ecosystems. Ecological Studies 42: 556-590. Walters, C. 1986. Adaptive management of renewable resources. MacMillan. 374 pp. Webb, R H.; Betancourt, J. L. 1992. Climatic variability and flood frequency of the Santa Cruz river, Pima County, Arizona. U. S. Geological Swvey Water-Supply paper 2379.40 p. Zeeman, E. 1976. Catastrophe theory. Scientific American 234(4): 65-83. Clmy, W. P., and D. A. Jameson 1981. Herbage production following tree and shrub removal in the pinyon-juniper type of Arizona. Journal of Range Management 34: 109-113. Holland, M. M.; Risser, P. G.; Naiman, R. 1. (eds.). 1991. Ecotones: the role of landscape boundaries in the management and restoration of changing environments. Chapman and Hall. Jameson, D. A. 1962. Effects of burning on a galleta-black grama range invaded by juniper. Ecology 43: 760-763. Jameson, D. A. 1969. Rainfall patterns on vegetation zones in Northern Arizona. Plateau 41(3): 105-111. Jameson, D. A. 1986. What shall we do about grazing systems research? Rangelands. 8: 178-179. Jameson, D. A. 1987. Climax or alternative steady states in woodland ecology. p. 9-13. In Proceedings, Pinyon-Juniper Conference, Reno, Nevada, Janumy 13-16, 1986. USDA Forest Service Intermountain Res. Sta. GTR INT-215. Jameson, D. A. 1988. Biological indicators of optimal stocking rate. pp. 158-163. In: Range and Ranch: Wildlife, Sheep and Goat Handbook, Vol. 1. Ijuernational Stockmen's School. Lang Printing, Bryan, Texas. Jameson, D. A. 1991. Effects of single season and rotation harvesting on cool- and warm-season grasses of a mountain grassland. Journal of Range Management. 44: 327-329. Jameson, D. A, and T. N. Johnsen, Jr. 1964. Ecology and control of alligator juniper. Weeds 12:140-142. Jameson, D. A., and E. H. Reid. 1%5. The pinyon-juniper types of Arizona. Journal of Range Management 18:152-153 Jones, D. 1977. Catastrophe theory applied to ecological systems. Simulation. 29: 1-15. Johnson, I. R.; Parsons, A. 1. 1985. A theoretical analysis of grass growth under grazing. Journal of Theoretical Biology. 112: 345-367. Laycock, W. A. 1991. Stable states and thresholds of range conditions on North American rangelands: a viewpoint. Journal of Range Management. 44: 427-433. 142