J. Longo, J. Shao, M. Irvine, L. Gui, and F.... Iowa Institute of Hydraulic Research
advertisement

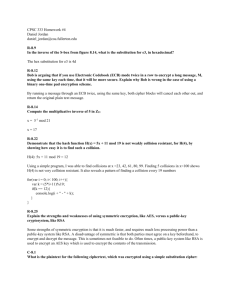
Phase-Averaged Towed PIV Measurements for Regular Head Waves in a Model Ship Towing Tank J. Longo, J. Shao, M. Irvine, L. Gui, and F. Stern Iowa Institute of Hydraulic Research The University of Iowa, Iowa City, IA, USA PIV and Modeling Water Wave Phenomena Cambridge, UK 17-19 April 2002 unsteady forces and moments, wavefield, and flowfield for model 5512 in regular head waves [Gui et al., 2001c; Gui et al., 2002; Wilson and Stern (2002)] of which the EFD work was part of an international collaborative project between IIHR, INSEAN, and DTMB on EFD/CFD and uncertainty assessment for DTMB model 5415 (Stern et al., 2000). The remaining EFD task is procurement of the unsteady flowfield and UA for model 5512 at the nominal wake plane. The present study is precursory for this task and will provide documentation of the unsteady data-acquisition and reduction procedures along with detailed data of the incident headwave flowfield and comparisons with 2D progressivewave theory for evaluation of the results herein. Abstract. Phase-averaged towed PIV measurements are made for regular head waves in a model-ship towing tank using both fixed and towed PIV systems in preparation for tests with model ships. Data reduction and uncertainty assessment software are developed and tested for both calm water and long wave, low steepness conditions used in previous tests with surface combatant. The results are validated through comparisons with progressive wave theory. 1 Introduction Focus of engineering fluid dynamics research is moving into unsteady flows in support of computational fluid dynamics (CFD) code development for simulation-based design with numerous natural and forced unsteady flow applications for aerospace, turbo machinery, and marine and ship hydrodynamics industries. Meeting this challenge requires significant advances in both CFD and experimental fluid dynamics (EFD). Present interest is in unsteady viscous ship hydrodynamics in support of unsteady Reynolds-averaged Navier Stokes (RANS) code development. Authors have identified forward-speed diffraction problem, i.e., restrained body advancing in regular headwaves, as building block problem towards ultimate goal of physical understanding and simulation of viscous nonlinear seakeeping and 6DOF maneuvering. Approach is complementary CFD, EFD, and uncertainty assessment (UA). CFD is used to guide EFD, EFD is used for validation and model development, and lastly CFD is validated and fills in sparse data for complete documentation and diagnostics of flow. Initial CFD study was conducted by Rhee and Stern (1998) and validated using Wigley hullform EFD data from Journee (1992) for investigation of unsteady forces and moments. A concurrent EFD study involving detailed measurement (Gui et al., 2001b) and UA (Gui et al., 2001a) of the turbulent nominal wake boundary layer of naval combatant DTMB model 5415 geosym (model 5512) was completed for development and commissioning of a towed, particle image velocimetry (PIV) measurement system for the Iowa Institute of Hydraulic Research (IIHR) towing tank. Both CFD and EFD efforts were then initiated to investigate 2 Test design 2.1 Facility The tests are conducted in the IIHR towing tank, which is 100 m long and 3.048 m wide and deep. The tank is equipped with a drive carriage, plunger-type wavemaker, and moveable wave dampener system. The drive carriage houses a computer (PC) and data-acquisition instrumentation, and pushes a 5.5-m trailer which is used as a platform for the PIV system and point of attachment for models. The wavemaker is hydraulically driven and controlled with an MTS controller and LabView software. It is capable of producing a wide range of wavelengths (λ=0.5-6.0 m) and wave steepnesses (Ak=0.025-0.3) and can also generate irregular waves. The wave dampeners are raised and lowered from the carriage before and after runs and enable twelve- and twenty-minute intervals for steady and unsteady tests, respectively. A right-handed Cartesian coordinate system (x, y, z) is used for the tests (Fig. 1). The origin is at the intersection of the calm free surface and the leading edge of the PIV measurement area (MA). The x, y, z axes are directed downstream, into the page, and upward, respectively. The coordinate system moves with the speed of the carriage, trailer, and PIV system Uc. PIV data is transformed into a wave-based coordinate system after defining the phase angle associated with each vector map. 1 2.2 Data-reduction equations Measured variables are the incident wave flowfield (U,V,W) and elevation (z). The data-reduction equations for discrete PIV measurements, vector map phase angle, and wave elevation are expressed Lobj S k ,i C k ,i = for k = 1, 2, 3; i = 1, 2,L , M (1) Limg ∆tU c γ i = −γ I − D ∆t 2π − 2π ; i = 1,..., M Te λ (2) z (3) L where Lobj is the width of the camera view in the object plane, Limg is the width of the digital image, Sk,i is the component of the particle image displacement, ∆t is the time between PIV images, D is the distance between a wavemeasuring servo probe and the PIV MA, and L is the tank depth (L=3.048 m). k equals 1, 2, 3 for the coordinates x, y, z, respectively. Mean and turbulent flowfield can be computed from a population of M discrete measurements. Incident wave-elevation data (z) is normalized with the towing tank depth. z MEASUREMENT AREA x DETAIL 1 (COORDINATE SYSTEM) PIV Uc = 1.53m/s SERVO-WAVE PROBE WAVEMAKER zma INCIDENT WAVE SEE DETAIL 1 Ak = 0.025 λ = 4.572m MEASUREMENT AREA Fig. 1. Experimental setup showing wavemaker, PIV system, servo wave probe, model trailer, and incident head wave (λ=4.572 m, Ak=0.025). Post-processed variables include encounter frequency (fe) and Nth-order Fourier series (FS) coefficients for PIV and wave elevation data. fe is computed with a standard fast-Fourier transform (FFT) of the ζI(t) time history. Next, a FS analysis is conducted on ζ I(t) to determine the phase of the incident wave at t=0 sec. The generalized Nth-order FS for given variable X (X=ζ, U, V, W) is expressed X F (t ) = X0 N + ∑ X n cos (2πnf e t + ∆γ n ) 2 n=1 (4) ∆γ n = γ n − γ I (5) X n = an2 + bn2 (6) b γ n = tan −1 n an (7) (8) bn = 2 T′ ∫ X(t)sin(2πnf et )dt for n = 0, 1, 2,K T 0 (9) 2.3 Measurement systems The towed DANTEC PIV system combines hardware and software that are integrated into a single measurement system illustrated in Fig. 1. The PIV hardware components (hydrodynamic strut, laser, light-guiding arm, light-sheet optics, digital camera) are assembled with a massive 2D, computer-controlled traversing system capable of automated movement along the transverse (y) and vertical (z) axes. Movement in the x-coordinate is done manually. The strut is pressurized, partly submerged, and contains a 20 mJ, dual cavity Nd:Yag laser and light-guide arm for steering 532 nm beams through the light-sheet optics, which are housed in a submerged, streamlined torpedo. The digital camera is a 1K×1K (1008×1018 pixels) cross-correlation camera fitted with a f/1.4 50 mm lens that views the light sheet from a distance of 50 cm through a 90° mirror. The maximum object-plane size or MA is 7.5×7.5 cm2, however, smaller areas can be utilized to increase processor throughput. The camera is housed in a separate submerged, streamlined torpedo. Light-sheet and camera torpedoes are joined with a rigid, streamlined mini-strut such that the light sheet is orthogonal to the viewing axis of the camera. Fig. 1 shows the system configured to measure the vertical (xz) plane wherein mean (U,W) and turbulent (uu,ww,uw) variables are acquired. Counter-clockwise rotation downward through 90° of the torpedoes and mini-strut about the light sheet torpedo longitudinal axis enables measurements in horizontal (xy) planes wherein mean (U,V) and turbulent (uu,vv,uv) variables are acquired. Synchronization of the laser and camera, image processing, and acquisition of towing carriage speed are performed with the DANTEC PIV 2000 processor which is equipped with a four-channel, 12-bit analog-to-digital (AD) card. Data acquisition and parameter settings are facilitated with an IBM-compatible, Windows NT PC equipped with a National Instruments GPIB card and DANTEC v.3.11 Flowmanager software. Results in the form of vector maps are displayed virtually in real-time at a rate of 7.5 Hz. Unsteady data is phase-locked by connection of a servo wave probe to the PIV AD board. The probe monitors the incident wave either directly above the MA or from some distance D upstream of the MA. The PC PIV 2000 PROCESSOR 2 T′ ∫ X(t)cos(2πnf et )dt for n = 0, 1, 2,K T 0 wherein XF is the reconstructed time history; Xn is the nthorder harmonic amplitude; γn is the corresponding phase; N is the order of the FS and chosen high enough to include all important frequency components. ∆γn is the harmonic phase adjusted with the incident wave. Time interval T’ is a multiple of the encounter wave period Te (=1/fe). ζI = y an = 2 second and fourth elevations provide 50% overlap with the first and third and third and fifth elevations, respectively, and the values are taken from the calm free surface to the top of the MA. Incident wave amplitude is 18.0 mm which means shallowest elevation places top of MA 7.0 mm beneath wave troughs. For the xy configuration data is taken at z=-62.5 and -137.5 mm. For NMA, z=-25.0, 53.34, and –110.45 mm where the second elevation provides roughly 66 and 33% overlap with the first and third elevations, respectively. For the unsteady cases, incident wave data is taken directly over the center of the measurement area (WMA) and 4.42 m upstream of the measurement area midpoint (NMA). servo probe is a ±5 cm, pre-calibrated Kenek wave probe with a resolution of 0.1 mm and maximum probe velocity of 700 mm/s. Silver-coated hollow glass spheres with a density of 1600 kg/m3 and an average diameter of 15 µm are used as seed particles. These particles have demonstrated very good light-reflectance for PIV image capture and adequate suspension capability. Additionally, the particles are capable of following sinusoidal motions with frequencies up to 1375 Hz. The second measurement system is composed of a DOS PC and the IIHR speed circuit. This measurement system is used for monitoring and measuring the carriage speed for each data-acquisition run. The DOS PC also monitors the output from the servo wave probe. 2.5 Data acquisition (DA) setup and procedures For WMA, the full measurement area is used with 32x32 pixel interrogation areas, no overlap, 8 pixels of offset in the axial direction to account for strong axial component, and no window function. For NMA, a subset of WMA is used which is 412 pixels wide, full height, centered on WMA, and 18% total area of WMA. Interrogation areas are 32x32 pixels, 50% overlap in both coordinates, 8 pixels of offset in the axial coordinate, and a Gaussian window function is used in the correlations. Above parameters yielded highest quality data. The final vector numbers are 31x31 and 11x62 for WMA and NWA, respectively. PIV image pairs are taken at 133 ms intervals, i.e., 7.5 Hz data rate and time between images is ∆t=490µs and 16170µs, for cases with and without forward speed, respectively. DOS data is sampled for 10 seconds over two analog channels at a rate of 410 Hz. For unsteady DA, first reference voltages for the servo probe and speed circuit are measured, then sidewall dampeners are raised, and the wavemaker is started and allowed to push a fully developed train of waves across the length of the tank The carriage is started and reaches a steady speed after which PIV acquisition is initiated from the PC keyboard. The laser goes into a free-running, 15 Hz mode. For each double image, the PIV processor makes one sweep across the analog inputs which includes the output from the servo wave probe (ζI) and correlates the digital images. The DOS computer runs in parallel with PIV windows machine, acquiring carriage speed and incident wave data. Vector maps are stockpiled over several carriage runs at a rate of 100-200 maps per carriage run. Convergence time histories (Fig. 2) reveal that roughly 1200 and 2000 vector maps are required for steady and unsteady tests, respectively, for converged mean and turbulence variables and harmonics. For steady DA, same procedures apply except the wavemaker remains stationary. 2.4 Conditions Steady (without wave) and unsteady (with wave) tests are performed with and without forward speed. For cases with forward speed, Uc=1.53 m/s. For unsteady cases, the head wave parameters including wavelength, frequency, and steepness are λ=4.572 m, fw=0.584 Hz, and Ak=0.025, respectively, where fw and Ak are defined in equations (10) and (11), and A and g are wave amplitude and local gravity acceleration (g=9.8031 m/s2), respectively. g fw = (10) 2πλ 2πA Ak = (11) λ The wave parameters and non-zero forward speed cases combine to produce an encounter frequency U g fe = + c ≈ 0.922 Hz (12) 2πλ λ which is the dominant frequency of the unsteady response in the incident head wave flowfield. The above speed and wave conditions are based on Gui et al. (2001b,c) and Gui et al. (2002). Uc=1.53 m/s produces a Froude number Fr = U c gL pp = 0.28 for model-scale testing with the Lpp=3.048 m model 5512 which is the cruise speed for fullscale version. The wave parameters were selected following observation and analysis of unsteady forces and moment results because these parameters produced the most manageable linear response in the farfield of the ship model. Measurements are performed with wide (WMA) and narrow (NMA) measurement areas with vertical (WMA, NWA) and horizontal (WMA) lightsheet orientations along the centerline of the tank. WMA captures significantly more area and data. NMA has 18% the area of WMA but was used for study of Gui et al. (2001b), has higher data throughput, and will later be shown to fortuitously crop unwanted amplitude and phase errors in the unsteady data with forward speed. For WMA and the xz configuration, z=-25.0, -62.5, -100.0, -137.5, and -175.0 mm where the 2.6 Data reduction (DR) procedures Data is post-processed with unsteady and steady FORTRAN 90 source codes written and executed from a Windows PC. For unsteady DR, data is phase averaged by processing 3 systematic and random error sources and 95% confidence, multiple-test approach. Previous development of PIV UA procedures (Gui et al., 2001a,b) has yielded uncertainty estimates for turbulent nominal wake plane and are listed in Table 1. Ongoing UA of the current datasets and development of UA procedures for unsteady PIV will be provided in the full paper. batches of carriage runs. Datasets (PIV and DOS speed files) are grouped by elevation and read as input. fe is computed from DANTEC-sampled ζI for each carriage run and FS coefficients are then computed which yields firstharmonic phase at t=0 sec and wave amplitude. The following procedures are completed at each grid point in the MA. fe is then used in equation (2) to compute specific phase angle of all vector maps in each carriage run. Data is sorted on phase angle from 0-2π and then filtered with a two-stage range filter and 2D-median filter to remove spurious vectors. Rejected vectors are not replaced because the phase-averaging technique does not require this step. A 5th-order least-squares curve is fit to the filtered data which represents the average unsteady response through one encounter period. Then, a 2nd-order FS is computed of the least-squares curve fit to obtain the harmonic amplitudes and phases of the response. Turbulence quantities are computed for valid vectors by first taking differences between raw vector and FS reconstruction. Then, RMS values are obtained from statistics of these differences over all phase angles (0-2π) or in eight phase groups equally spaced in 0-2π to test for phase-dependence of turbulence. Convergence time histories for 0th and 1st-harmonic amplitude and 1st-harmonic phase are computed Mvalid-10 times at seven equally spaced locations on the center of the MA from top to bottom. 3. Results and comparison theory Results are presented as percent difference between theory and experiment. Theory for steady cases are calm water (UT,WT=0) and uniform flow (UT=1, WT=0). Theory for unsteady data is 2D progressive-wave theory which characterizes the external flowfield with following equations γU1,W1 (radians) U 1, W 1 0.02 (a) 0 1000 M valid 2000 4.00 2.00 0.00 (b) 0 1000 WT = 2πf w Ae kz sin( kx − 2πf e t ) (14) 3.1 Steady (calm water) with and without forward speed Steady-flow data is presented for without and with forward speed conditions in Figs. 3 and 4a,b, respectively, and averages over MA are summarized in Table 1 for WMA and NMA. Steady UA results from Gui et al. (2001c) are also included in Table 1 for comparison. The results include mean (U,V,W) and turbulence (uu,vv,ww,uv,uw) parameters. V,W data is not displayed in the figures. V data is not included in Fig. 4a and Table 1 but will be provided in the full paper. For Uc=0 m/s, contours (UT-UE) display a random pattern and magnitude is two orders less than axial velocity uncertainty (UU). Turbulence levels are several order-ofmagnitude less than uncertainty values for ship flowfield. 6.00 (i,j)=(6,1); U 1 (i,j)=(6,60); U 1 (i,j)=(6,1); W1 (i,j)=(6,60); W 1 (13) The perturbation for headwave flowfield is computed by subtracting the non-dimensional advance speed of the carriage (Uc=1) from equation (13). 0.04 0.03 U T = 1 + 2πf w Ae kz cos( kx − 2πf e t ) 2000 M valid Fig. 2. Convergence histories of 1st-harmonic amplitude (a) and 1st-harmonic phase for U,W at two grid points. Z For steady DR, data is also reduced by processing batches of carriage runs. Data is read and spurious vectors are removed with a two-stage range filter and a 3D median filter where the third dimension is time. Mean and turbulence results are computed with statistical analysis at each grid point from the full population of valid vectors. Convergence time histories for each variable are computed Mvalid-1 times at seven equally spaced locations on the center of the MA from top to bottom. X U T-U E (%) Uc=0 m/s -0.01 -0.02 z -0.03 -0.10 0.00 y Y 0.10 0.925 0.930 0.935 0.940 x 0.945 0.20 0.18 0.16 0.14 0.12 0.10 0.08 0.06 0.04 0.02 0.00 Fig. 3. Comparison (theory-experiment) of mean axial flow for Uc=0 m/s 2.7 Uncertainty assessment The uncertainty assessment of the measurement results follows the ASME Test Uncertainty (1998). The UA procedures are based on separation and identification of For Uc=1.53 m/s, WMA, contours (UT-UE) display organized, repeatable patterns independent of z with cells of decelerated flow at leading and trailing edge. Origin of patterns are unknown but are thought to be consequence of 4 either optical distortion of digital images or induced flow about PIV underwater torpedoes, or both. The former theory was tested by imaging standard grids, but no detectable distortion in the test images was observed. Z are very small but 2 orders-of-magnitude larger for the case with forward speed. 3.2 Unsteady (waves) with and without forward speed Unsteady-flow data is presented for without and with forward speed conditions in Figs. 5 and 6, and 7, respectively, and averages are summarized in Table 2 (WMA) and Table 3 (NMA). The results include 0th harmonic (U0,V0,W0), 1st-harmonic amplitude and phase (U1,V1,W1,γU1,γV1,γW1), and unsteady turbulence (uu0-2π,ww02π,uw0-2π). Z Uc Y X X U T-U E (%) U c=1.53 m/s U T-UE (%) Uc=1.53 m/s Uc -0.02 -0.04 z -0.06 z 1.75 1.58 1.40 1.23 1.05 0.88 0.70 0.53 0.35 0.17 0.00 -0.02 Y -0.04 1.75 1.58 1.40 1.23 1.05 0.88 0.70 0.53 0.35 0.17 0.00 Z X z y 0.93 0.94 x (a) 0.40 0.20 0.16 0.12 0.08 0.04 0.00 -0.04 -0.08 -0.12 -0.16 -0.20 -0.02 -0.03 -0.06 0.20 U 0T-U 0E (%) -0.01 -0.08 0.00 Y 0 y 0.005 -0.005 0.000 0.005 y (b) 0.935 x 0.925 0.930 0.935 0.940 x 0.945 (a) Z Fig. 4. Comparison (theory-experiment) of mean axial flow for Uc=1.53 m/s for five elevations (a: WMA) and three elevations (b: NMA). Table 1. X U 1T-U 1E (%) -0.01 Summary of steady PIV results with and without forward speed and z=-25 mm. Y 1.30 1.22 1.14 1.06 0.98 0.90 0.82 0.74 0.66 0.58 0.50 -0.02 U NMA z WMA 0 m/s 1.53 m/s 1.53 m/s UA 0.05% -1.0% 1.2% UU=2.4% - - - UV=7.7% W 0.0004% 0.5% 0.080% UW =4.4% uu 0.00003% 0.012% 0.006% Uuu=4.7% vv - - - Uvv=4.3% ww 0.00002% 0.0070% 0.0066% Uww=5.0% uv - - - Uuv=4.1% uw 0% 0.00032% 0.00028% Uuw=5.8% -0.005 0.000 0.005 y 0.925 0.930 0.935 0.940 x 0.945 (b) Z X -0.02 -0.03 -0.005 0.000 0.005 y Also of interest is that potential-flow calculations for the PIV underwater torpedoes in a uniform flow do not replicate trends observed in Fig. 4a. For NMA, contour patterns (UTUE) have increased uniformity since focus area is a narrow strip centered on WMA. Absolute value (UT-UE) roughly same in comparison WMA and turbulence levels are same order as for WMA but somewhat reduced. Uc=0 m/s and 1.53 m/s results set the mean and turbulence noise levels of the fixed and towed PIV system, respectively. For the former, mean-flow levels are roughly 0.05%,0.0005% for U,W, respectively, and for the latter levels are roughly 1-2 order-of-magnitude larger. Turbulence levels for both cases Y γU1T-γU1E (%) -0.01 z V -0.03 0.925 0.930 0.935 0.940 x 0.945 2.50 2.25 2.00 1.75 1.50 1.25 1.00 0.75 0.50 0.25 0.00 (c) Fig. 5. Comparison (theory-experiment) of 0th and 1stharmonic amplitude and 1st-harmonic phase U for Uc=0 m/s and one elevation. V,W data is not displayed in Figs. 5 and 6 and V data and unsteady turbulence are not included in Tables 2 and 3 but will be provided in the full paper. Second-harmonic data is computed but not shown. For Uc=0 m/s, contours U0T-U0E, U1T-U1E, γU1T- γU1E (Fig. 5a,b,c) display random patterns through WMA. γU1TγU1E is positive everywhere, thus making it a phase lead. Magnitudes U0T-U0E, U1T-U1E, γU1T- γU1E are small 5 agreement theory is within a cross pattern centered on WMA. everywhere and regarded satisfactory, especially in consideration of present orbital velocity magnitudes which are about 5%Uc for the wave parameters and measurement depth. Comparisons for W variables are similarly satisfactory as shown in Table 2. Second harmonic amplitudes are order of 1e-3 and 1e-4 for U2 and W2, respectively, which is 1-2 orders magnitude smaller than U1,W1 and indicates dominant 1st-harmonic response of the flowfield to the incident wave. V1 (not shown or in Table 2) is an order-of-magnitude smaller than U1,W1, which confirms the 2D nature of the flowfield. Z Uc X Y Z -0.04 Y z 0.925 0.930 0.935 0.940 x 0.945 0.935 x Uc (a) X z 0.925 0.930 0.935 0.940 x 0.945 -0.04 z W 1T-W 1E (%) 1.50 1.35 1.20 1.05 0.90 0.75 0.60 0.45 0.30 0.15 0.00 -0.04 -0.06 0 y 0.005 Uc Y -0.06 0 y 0.005 0.935 x 0.935 x Z γU1T-γU1E (%) z -0.03 -0.005 0.000 0.005 y 0.925 0.930 0.935 0.940 x 0.945 Uc X Z Y Uc γU1T-γU1E (%) Fig. 6. Comparison (theory-experiment) of 0th and 1stharmonic amplitude and 1st-harmonic phase U for Uc=1.53 m/s and one elevation. -0.04 For Uc=1.53 m/s, contours U0T-U0E, U1T-U1E, γU1T- γU1E (Fig. 6a,b,c) are changed and show organized, repeatable patterns. 0th-harmonic trends are similar in shape and magnitude with those observed in Fig. 4a, i.e., the uniformflow perturbation pattern is recovered. U1T-U1E mostly uniform except for two circular cells downstream and upstream of WMA leading and trailing edges, respectively, where U1E is decreased. Phase comparison displays phase lead everywhere and a quadrant pattern where best -0.02 10.00 9.00 8.00 7.00 6.00 5.00 4.00 3.00 2.00 1.00 0.00 -0.04 -0.06 0 y 0.005 0.935 x Y γW1T-γW1E (%) -0.02 (c) X z -0.02 10.00 9.00 8.00 7.00 6.00 5.00 4.00 3.00 2.00 1.00 0.00 z -0.01 Y (b) Z X X -0.02 1.50 1.35 1.20 1.05 0.90 0.75 0.60 0.45 0.30 0.15 0.00 z 1.50 1.35 1.20 1.05 0.90 0.75 0.60 0.45 0.30 0.15 0.00 Uc U 1T-U 1E (%) Y -0.02 Z Y U 1T-U 1E (%) -0.01 0.935 x Z -0.02 X -0.06 0 y 0.005 Z -0.005 0.000 0.005 y 1.00 0.80 0.60 0.40 0.20 0.00 -0.20 -0.40 -0.60 -0.80 -1.00 -0.04 -0.06 0 y 0.005 Uc -0.03 W 0T-W 0E (%) z 1.00 0.80 0.60 0.40 0.20 0.00 -0.20 -0.40 -0.60 -0.80 -1.00 -0.02 -0.005 0.000 0.005 y Y U 0T-U 0E (%) -0.01 -0.03 X -0.02 1.75 1.58 1.40 1.22 1.05 0.88 0.70 0.52 0.35 0.17 0.00 Uc X Uc U 0T-U 0E (%) z -0.02 Z 10.00 9.00 8.00 7.00 6.00 5.00 4.00 3.00 2.00 1.00 0.00 -0.06 0 y 0.005 0.935 x Fig. 7. Comparison (theory-experiment) of 0th and 1stharmonic amplitude U,W for Uc=1.53 m/s and 1stharmonic phase U,W for three elevations. 6 harmonic amplitude and within 4-6% theory for 1stharmonic phase . As such, investigations of the unsteady nominal wake flowfield for model 5512 can move forward using the NMA and same DA/DR procedures documented herein. Average FS-amplitude differences are smaller than theory but compare satisfactorily as deviation from theory is 1.0%. Experimental phase leads theory by average of 4.2%. Comparisons for W are similarly satisfactory as shown in Table 2. As for case with zero-forward speed, second harmonic amplitude U2,W2 are 1-2 orders magnitude smaller than 1st-harmonic amplitudes U1,W1 confirming dominant 1st-harmonic response of measured data with moving carriage. Origin of the patterns in the unsteady data are unknown but also could be consequence of either optical distortion of digital images or an unsteady, induced flow about PIV underwater torpedoes, or both. No CFD was undertaken to determine if the observed patterns could be simulated. Patterns and trends in Fig. 6 indicate that best comparison with theory occurs in a subregion (NMA) centered on WMA. Results for this region are shown in Fig. 7 for both U,W and Table 3. Contours of comparisons 0thand 1st-harmonic amplitude and 1st-harmonic phase are mostly uniform throughout NMA. Average 0th-harmonic differences are very similar with those from uniform flow test. Average 1st-harmonic differences are halved from case with WMA. Average 1st-harmonic phase leads are 4-6% for both U,W. Table 2. Table 3. Summary of unsteady PIV results with and without forward speed for WMA and z=-25 mm. U0 Uc=0 m/s Uc=1.53 m/s -0.02% 0.40% V0 - - W0 0.02% 0.43% U1 1.0% 1.0% V1 - - W1 0.8% 1.5% U2 0.16% 0.15% V2 - - W2 0.09% 0.18% γU1 1.5% 4.2% γV1 - - γW1 0.8% -0.3% uu0-2π - - vv0-2π - - ww0-2π - - uv0-2π - - uw0-2π - - Summary of unsteady PIV results with forward speed for NMA and three elevations. z=-25.0 mm z=-53.34 mm z=-110.45 mm U0 1.31% 1.23% 1.43% W0 0.10% 0% -0.22% U1 0.7% 0.8% 0.6% W1 0.7% 0.7% 0.7% U2 0.13% 0.11% 0.17% W2 0.07% 0.06% 0.08% γU1 6.0% 6.2% 5.9% γW1 4.3% 4.8% 4.5% uu0-2π - - - ww0-2π - - - uw0-2π - - - 4. Conclusions and future work Phase-averaged towed PIV measurements are made for regular head waves in a model-ship towing tank using both fixed and towed PIV systems in preparation for tests with model ships. Data reduction and uncertainty assessment software are developed and tested for both calm water and long wave, low steepness conditions used in previous tests with surface combatant. The results are validated through comparisons with progressive-wave theory. Steady-flow results indicate random and organized patterns for cases without and with forward speed, respectively. Average comparisons with theory are roughly within 0.05%,0.0005% for U,W for the former and 1.0%,0.1% for U,W for the latter. Turbulence values are nearly negligible for both cases. All results are well within previous steady-flow UA results. Unsteady-flow results also display random and organized patterns in the FS harmonic amplitudes and 1st-harmonic phase for cases without and with forward speed, respectively. Best average comparisons with 2D progressive-wave theory are roughly within 1% for the 0th- and 1st-harmonic amplitude and 4-6% for the 1st-harmonic phase and occur inside a narrow window centered on the PIV object plane. The origin of the patterns that emerge with forward speed in the steady and unsteady flow are unknown. Efforts to understand the source of the patterns included testing of the digital images and potential-flow calculations of the flow around the PIV torpedoes for the steady case but both were inconclusive. The prevailing theory for these patterns Based on the above data, Fig. 7 and Table 3 demonstrate good agreement with theory and are considered benchmark performance levels for towed, unsteady PIV at IIHR, i.e., approximately within 1% theory for 0th- and 1st- 7 is sub-pixel distortion in the digital images, induced flow by the underwater PIV torpedoes, or a combination of both. The final paper will include expanded discussion of the DA and DR procedures including a figure summarizing the DR processes, complete discussion of procedures and results of the steady and unsteady UA, and complete presentation of the three-dimensional steady and unsteady measurements including figures for xy-plane data and updates of tables for V results and unsteady turbulence. Future work includes steady and unsteady PIV measurements and full UA of the nominal wake plane of model 5512 for same long wavelength, low wave steepness incident wave presented herein. Documentation of the test program and results are ongoing (Longo et al., 2002). The data and UA will be archived at www.iihr.uiowa.edu~towtank. Wave Field,” Int. J. Num. Meth. Fluids, Vol. 37, pp. 445-478. R. Wilson and F. Stern, (2002), "Forward Speed Diffraction Problem for a Naval Surface Combatant using an Unsteady RANS Method," 24th Symposium on Naval Hydrodynamics, Fukuoka, Japan (in preparation). Stern F, Longo J, Penna R, Oliviera A, Ratcliffe T, Coleman H (2000), International Collaboration on Benchmark CFD Validation Data for Naval Surface Combatant. 23rd ONR Symposium on Naval Hydrodynamics, Val de Reuil, France, 17-22 September. Acknowledgements This research was sponsored by Office of Naval Research under Grants N00014-96-1-0018 under the administration of Dr. E.P. Rood and N00014-01-1-0073 under the administration of Dr. Pat Purtell whose support is greatly appreciated. References ASME, (1998), “Test Uncertainty,” ASME PTC 19.1-1998, The American Society of Mechanical Engineers, 112 pp. Gui, L., Longo, J., and Stern, F., (2001a), “Biases of PIV Measurement of Turbulent Flow and the Masked Correlation-Based Interrogation,” Experiments in Fluids, Vol. 30, Issue 1, pp. 27-35. Gui, L., Longo, J., and Stern, F., (2001b), “Towing Tank PIV Measurement System, Data and Uncertainty Assessment for DTMB Model 5512,” Experiments in Fluids, Vol. 31, pp. 336-346. Gui., L., Longo, L., Metcalf, B., Shao, J., and Stern, F., (2001c), “Forces, Moment, and Wave Pattern for Surface Combatant in Regular Head Waves-Part 1: Measurement Systems and Uncertainty Analysis,” Experiments in Fluids, Vol. 31, Issue 6, pp. 674-680. Gui., L., Longo, L., Metcalf, B., Shao, J., and Stern, F., (2002), “Forces, Moment, and Wave Pattern for Naval Combatant in Regular Head Waves-Part 2: Measurement Results and Discussions,” Experiments in Fluids, to appear. Journee J M J (1992), Experiments and calculations on four Wigley hullforms. Delft University of Technology, Ship Hydromechanics Lab, Report No. 909. Longo, J., Shao, J., Irvine, M., and Stern, F., (2002), "Phaseaveraged PIV for Surface Combatant in Regular Head Waves," 24th Symposium on Naval Hydrodynamics, Fukuoka, Japan (in preparation). Rhee, S.H. and Stern, F.,(2001), “Unsteady RANS Method For Surface Ship Boundary Layer And Wake And 8