EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
advertisement

EXPLICIT METHODS FOR DERIVED CATEGORIES OF
SHEAVES
ALASTAIR CRAW
Abstract. These notes aim to complement the lecture notes of Căldăraru by
providing an introduction to explicit methods in the study of derived categories in
algebraic geometry. The bounded derived category of coherent sheaves on certain
very simple algebraic varieties is equivalent to the bounded derived category of
finitely generated modules over an algebra. We provide an introduction to this
circle of ideas with a focus on explicit examples.
Contents
1. Lecture
2. Lecture
3. Lecture
4. Lecture
5. Lecture
6. Lecture
7. Lecture
References
1:
2:
3:
4:
5:
6:
7:
The category of bound quiver representations
Tilting sheaves and exceptional collections
The derived category of smooth toric del Pezzos
On the derived McKay correspondence conjecture
Mukai =⇒ McKay
Wall crossing phenomena for moduli of G-constellations
The derived McKay correspondence beyond G -Hilb
1
6
11
17
23
28
34
38
1. Lecture 1: The category of bound quiver representations
This lecture introduces an abelian category that plays the key rôle in understanding the bounded derived category of coherent sheaves for certain very simple
algebraic varieties.
1.1. A quiver Q is a directed graph given by a set Q0 of vertices, a set Q1 of
arrows, and maps tl, hd : Q1 → Q0 that specify the tail and head of each arrow. We
assume that both Q0 , Q1 are finite sets, and that Q is connected, i.e., the graph
obtained by forgetting the orientation of arrows in Q is connected. A nontrivial
path in Q of length ℓ ∈ N from vertex i ∈ Q0 to vertex j ∈ Q0 is a sequence of
arrows p = a1 · · · aℓ with hd(ak ) = tl(ak+1 ) for 1 ≤ k < ℓ. We set tl(p) := tl(a1 ) and
hd(p) := hd(aℓ ). In addition, each vertex i ∈ Q0 gives a trivial path ei of length
zero, where tl(ei ) = hd(ei ) = i. A cycle is a nontrivial path in which the head and
tail coincide, and Q is acyclic if it contains no cycles.
Let k be a field. The path algebra kQ of a quiver Q is the k-algebra whose
underlying k-vector space has as basis the set of paths in Q, where the product
1
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
2
of basis elements equals the basis element defined by concatenation of the paths if
possible, or zero otherwise. The algebra kQ is graded by path length, i.e.,
M
kQ =
(kQ)k
k∈N
where (kQ)k denotes the vector subspace spanned by paths of length k, and (kQ)k ·
(kQ)ℓ ⊆ (kQ)k+ℓ . The subring (kQ)0 ⊂ kQ spanned by the trivial paths ei for
i ∈ Q0 is a semisimple ring in which the elements ei are orthogonal idempotents,
that is, ei ej = ei when i = j, and 0 otherwise.
P
Lemma 1.1. The path algebra kQ is an associative algebra with identity i∈Q0 ei .
Moreover, kQ is finite dimensional over k if and only if Q contains no cycles.
Proof. Composition is tautologically associative, hence so is kQ. Multiplying a path
P
p on the left and right by i∈Q0 ei is the same as multiplying on the left and right
by etl(p) and ehd(p) respectively; in each case, the result is p. Extending to all of kQ
P
by k-linearity shows that i∈Q0 ei is the identity.
Exercise 1.2. Prove the final statement of the lemma.
Example 1.3. The quiver with two vertices and a pair of arrows as shown
0
1
◦
◦
is the Kronecker quiver, or the Beilinson quiver for P1 . More generally, the Beilinson
quiver for Pn is the quiver
0
◦
..
.
1
..
.
◦
2
n−1
◦ ··· ◦
..
.
n
◦
with n + 1 vertices denoted Q0 = {0, 1, . . . , n}, that has n + 1 arrows from the ith
vertex to the (i + 1)-st vertex for each i = 0, 1, . . . , n − 1.
Example 1.4. The McKay quiver of the A2 singularity provides an example of a
quiver that admits drected cycles:
0
◦
1◦
◦2
1.2. The category of quiver representations. As is typical in representation
theory, our interest lies not just with kQ, but with modules over kQ. To help us
visualise these modules we use the terminology of quiver representations.
A representation of the quiver Q consists of a k-vector space Wi for each i ∈ Q0
and a k-linear map wa : Wtl(a) → Whd(a) for each a ∈ Q1 . More compactly, we
write W = (Wi )i∈Q0 , (wa )a∈Q1 . A representation is finite dimensional if each
vector space Wi has finite dimension over k, and the dimension vector of W is
the tuple of nonnegative integers (dimk Wi )i∈Q0 . A map between finite-dimensional
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
3
representations W and W ′ is a family ψi : Wi → Wi′ for i ∈ Q0 of k-linear maps
that are compatible with the structure maps, that is, such that the diagrams
Wtl(a)
wa
ψtl(a)
′
Wtl(a)
Whd(a)
ψhd(a)
wa′
′
Whd(a)
commute for all a ∈ Q1 . With composition defined componentwise, we obtain the
category of finite-dimensional representations of Q, denoted repk (Q).
Example 1.5. For the Kronecker quiver from Example 1.3, consider representations
W of Q with dimension vector (1, 1). This means that W consists of two onedimensional vector spaces (W0 , W1 ) together with two maps w1 , w2 : W0 → W1 .
Any such representation fits into a short exact sequence
0 −−−−→ S −−−−→ W −−−−→ Q −−−−→ 0.
To determine the isomorphism classes of such representations we first choose bases
and thus identify W0 and W1 with k; the maps (w1 , w2 ) then determine an element
of k2 . Rescaling the bases just gives the scaling action of k∗ on k2 . If both the
maps w1 and w2 are zero then W = S ⊕ Q. For all other points of k2 the corresponding representation of Q is indecomposable, and the isomorphism classes of
these representations are parameterised by the orbits of k∗ in k2 r {0}, i.e., by P1 .
Let mod(A) denote the category of finitely generated left A-modules. If Aop
denotes the opposite algebra where the product satisfies a · b := ba, then mod(Aop )
is the category of finitely generated right A-modules. If Qop denotes the quiver
obtained from Q be reversing the orientation of the arrows then (kQ)op ∼
= kQop .
Proposition 1.6. The category repk (Q) is equivalent to the category of finitelygenerated left kQ-modules.
Proof. Let W = (Wi )i∈Q0 , (wa )a∈Q1 be a finite-dimensional representation of Q.
L
Define a k-vector space M := i∈Q0 Wi , and define a kQ-module structure on M
by extending linearly from
(
(
m, m ∈ Wi ,
wa (mtl(a) ),
ei m =
and a·m =
0, m ∈ Wj for j 6= i,
0,
m ∈ Wtl(a) ,
m ∈ Wj for j 6= tl(a),
for i ∈ Q0 and a ∈ Q1 . This construction can be inverted as follows: given a left
kQ-module M we set Wi := ei M for i ∈ Q0 and define maps wa : Wtl(a) → Whd(a) by
sending m to a(m) for each a ∈ Q1 . One easily checks that maps of representations
of Q correspond to kQ-module homomorphisms.
An immediate consequence of the proposition is that both repk (Q) and repk (Qop )
are abelian categories.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
4
Exercise 1.7. Prove directly from the definition that repk (Q) is an abelian category.
1.3. In most geometric contexts, the algebra of interest is not isomorphic to the
path algebra of a quiver Q, but is isomorphic to the quotient of a path algebra by
an ideal of relations. Formally, a relation in a quiver Q (with coefficients in k) is
a k-linear combination of paths of length at least two, each with the same head
and tail. Our interest lies only with relations of the form p − p′ ∈ kQ, where p, p′
are paths in Q with the same head and tail. Any finite set of relations R in Q
determines a two-sided ideal hRi in the algebra kQ.
A bound quiver (Q, R), or equivalently a quiver with relations, is a quiver Q together with a finite set of relations R. A representation of (Q, R) is a representation
of Q where each relation p − p′ ∈ R is satisfied in the sense that the corresponding
linear combination of homomorphisms from Wtl(p) to Whd(p) arising from the arrows in p coincides with the homomorphisms arising from arrows in p′ . As before,
finite-dimensional representations of (Q, R) form a category denoted repk (Q, R).
Proposition 1.8. The category repk (Q, R) is equivalent to the category of left
kQ/hRi-modules.
Exercise 1.9. Prove Proposition 1.8.
Example 1.10. The quivers from Example 1.3 for which n ≥ 3 admit a set of
relations that have geometric significance. Consider the case with three vertices.
List the arrows from vertex 0 to vertex 1 as a1 , a2 , a3 and the arrows from vertex
1 to vertex 2 as a4 , a5 , a6 . Set R = {a1 a5 − a2 a4 , a1 a6 − a3 a4 , a2 a6 − a3 a5 }. The
quotient algebra kQ/hRi is isomorphic to the endomorphism algebra of the bundle
OP2 ⊕ OP2 (1) ⊕ OP2 (2).
k
k
k
1.4. Given an arbitrary abelian category A it is natural to start with the simple
objects, i.e., those for which any subobject is either a zero object or is isomorphic
to W . For example, the vertices in a quiver Q determine an obvious collection
of simple objects, namely, the representations S(i) for i ∈ Q0 for which the only
nonzero vector space is k placed at the ith vertex. One can use short exact sequences
in A to build new objects. For example, if A, B are (say, simple) objects in A then
a short exact sequence
f
g
0 −−−−→ A −−−−→ C −−−−→ B −−−−→ 0
gives an extension C of A by B. The object C will not usually be unique (in
fact, the abelian group Ext1A (B, A) classifies such extensions). Note that the simple
objects are precisely those objects that cannot be obtained by taking extensions of
other objects in this way. Bound states of more than two objects are encoded in
the notion of a filtration. A Jordan-Hölder filtration of an object E in an abelian
category A is a finite filtration
0 = E0 ⊂ E1 ⊂ · · · ⊂ En−1 ⊂ En = E
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
5
such that each factor object Fi = Ei /Ei−1 is simple. If such a filtration exists,
it will not in general be unique, but one can check that the simple factors Fi are
uniquely determined up to isomorphism and reordering. Note that we obtain E by
repeatedly gluing simple objects using the short exact sequences
0 −−−−→ Ei−1 −−−−→ Ei −−−−→ Fi −−−−→ 0.
The category A is of finite length if every object E ∈ A has a Jordan-Hölder
filtration. In an abelian category of finite length the simple objects can be thought
of as the basic building blocks; all other objects can be made by repeatedly glueing
simple objects together by extensions.
Recall from Proposition 1.6 that repk (Q, R) is an abelian category for any bound
quiver (Q, R).
Proposition 1.11. The category repk (Q, R) has finite length.
Proof. Given a finite dimensional representation W of a quiver Q, either W is simple
or there is a nontrivial short exact sequence
0 −−−−→ S −−−−→ W −−−−→ Q −−−−→ 0.
Now if Q is not simple, then we can break it up into pieces in the same way. This
process must stop since W has finite dimension over k. Eventually, we obtain a
simple object B and a surjection f : W → B. Take W 1 ⊂ W to be the kernel of f
and repeat the argument with W 1 . In this way, we obtain a filtration
· · · ⊂ W 3 ⊂ W 2 ⊂ W 1 ⊂ W,
where each quotient object W i−1 /W i is simple. Once again, this filtration cannot
continue indefinitely, so after a finite number of steps we get W n = 0. Renumbering
by setting Wi := W n−i for 1 ≤ i ≤ n gives a Jordan-Hölder filtration W• .
1.5. The fact that repk (Q, R) has finite length has implications for its Grothendieck
group. For an abelian category A the Grothendieck group K(A) is defined to be
the free abelian group generated by the isomorphism classes of objects, modulo a
relation of the form C = A + B for every short exact sequence
0 −−−−→ A −−−−→ C −−−−→ B −−−−→ 0
in the category A.
Theorem 1.12. Let (Q, R) be an acyclic bound quiver and set A := repk (Q, R) ∼
=
mod(kQ/R). Then the Grothendieck group K(A) is isomorphic to the free abelian
group ZQ0 generated by the vertex set of Q.
Proof. The assumption that Q admits no cycles ensures that the vertex simples
{S(i) : i ∈ Q0 } form a complete set of representatives for the isomorphism classes
of the simple objects in A. Taking the Jordan–Hölder filtration of an arbitrary
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
6
object W ∈ A and applying an easy inductive argument gives
[W ] =
n
X
k=1
[Wk /Wk−1 ] =
X
αi [S(i)],
i
where S(i) are the vertex simples and αi ∈ Z≥0 . The isomorphism classes of the
vertex simplex therefore generate the Grothendieck group. The map sending a
representation of Q to its dimension vector induces a Z-linear map dim : K(A) →
ZQ0 under which the image of the set of vertex simples is the standard basis of ZQ0 .
It follows that {S(i) : i ∈ Q0 } are independent in K(A).
This result shows that repk (Q) is much simpler than the abelian category coh(X)
of coherent sheaves on an algebraic variety of positive dimension. Indeed, the only
simple objects of coh(X) are the skyscraper sheaves of points of X. Since only
sheaves supported in dimension zero can have a filtration by finitely many such
sheaves, it follows that coh(X) cannot be of finite length.
2. Lecture 2: Tilting sheaves and exceptional collections
This lecture describes how, in certain very nice cases, the bounded derived category of coherent sheaves on an algebraic variety can be described via the category of
finitely-generated representations of a bound quiver (Q, R). When this is the case,
we may understand calculations in D b (coh(X)) using the quiver Q.
2.1. Let D be a triangulated category. A triangulated subcategory of D is epaisse
(thick) if it is closed under isomorphisms, shifts, taking cones of morphisms, and
direct summands of objects. The epaisse envelope of an object E in D is the smallest
epaisse triangulated subcategory of D containing E. If the epaisse envelope of E in
D is equal to D itself, then we say that E classically generates D.
2.2. Tilting sheaves. Let X be a smooth projective variety over k, and let coh(X)
denote the abelian category of coherent sheaves on X. Recall that the global dimension of a k-algebra A is defined to be the maximal projective dimension of any
object in mod(A).
A coherent sheaf T on X is a tilting sheaf if
(T1) the algebra A := EndOX (T ) has finite global dimension;
(T2) we have ExtkOX (T, T ) = 0 for all k > 0; and
(T3) the sheaf T classically generates D b (coh(X)).
If T is locally-free then it is called a tilting bundle.
Theorem 2.1 (Baer [1], Bondal [4]). Let T be a tilting sheaf on a smooth projective
variety X, with associated tilting algebra A = EndOX (T ). Then the functors
F (−) := HomOX (T, −) : coh(X) → mod(Aop )
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
7
and
G(−) := − ⊗A T : mod(Aop ) → coh(X)
induce equivalences of triangulated categories
RF (−) = RHomOX (T, −) : D b (coh(X)) → D b (mod(Aop ))
and
L
LG(−) = − ⊗A T : D b (mod(Aop )) → D b (coh(X))
that are quasi-inverse to each other.
Proof. The first step is to construct the functors RF and LG. Let E be a quasicoherent sheaf on X. The vector space HomOX (T, E) becomes a right A-module by
precomposition, that is, for a ∈ HomOX (T, T ) and f ∈ HomOX (T, E) set a · f =
f ◦ a ∈ HomOX (T, E). Since HomOX (T, −) is a covariant left-exact functor and
since the category of quasicoherent sheaves has enough injectives, one obtains a
right-derived functor
RF (−) = RHomOX (T, −) : D b (Qcoh(X))) → D(Mod(Aop ))
from the bounded derived category of quasicoherent sheaves on X to the derived
category of the category of (not necessarily finitely-generated) right A-modules.
The cohomology modules of the image are
H i (RHomOX (T, E)) = Ri HomOX (T, E) = ExtiOX (T, E).
Smoothness of X implies that ExtiOX (T, E) = 0 for i < 0 and i > dim(X), so the
image of the functor RF lies in D b (Mod(Aop )). Since D b (coh(X)) is equivalent
to the full subcategory of D b (Qcoh(X))) whose objects have coherent cohomology
sheaves, we may consider the restriction of RF to D b (coh(X)). If E is a coherent
sheaf then ExtiOX (T, E) is finite dimensional as a k-vector space and hence as an
A-module, so the cohomology modules of the image actually lie in mod(A). Thus,
we obtain by restriction a functor
RF (−) = RHomOX (T, −) : D b (coh(X))) → D b (mod(Aop )).
Similarly, since the module category Mod(Aop ) has enough projectives and the
functor − ⊗A T is right-exact, we obtain a left-derived functor
L
LG(−) = − ⊗A T : D b (Mod(Aop )) → D(Qcoh(X))
to the a priori unbounded derived category of quasicoherent sheaves. For an Amodule B, the cohomology sheaves of the image are
L
A
(B, T ),
H j B ⊗A T = T or−j
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
8
and these vanish outwith a finite range because A has finite global dimension. Furthermore, restricting to finitely generated A-modules ensures that these cohomology
sheaves are coherent, giving
L
LG(−) = − ⊗A T : D b (mod(Aop )) → D b (coh(X)).
Since T satisfies property (T2), the composite functor satisfies
L
RF ◦ LG(A) = RF A ⊗A T = RHomOX (T, T ) = HomOX (T, T ) = A,
so RF ◦ LG is the identity on A. The classical envelope of A contains finitelygenerated free A-modules, and hence finitely-generated projective A-modules. Since
A has finite global dimension, every finitely generated A-module admits a finite projective resolution. This implies that A classically generates D b (mod(A)), so RF ◦LG
is the identity on the whole of D b (mod(Aop )). Thus, the left-derived functor LG(−)
identifies D b (mod(Aop )) with the triangulated subcategory of D b (coh(X)) generated
L
by LG(A) = A ⊗A T = T . Property (T3) now gives the derived equivalences.
Corollary 2.2. Suppose that T is a coherent sheaf on X satisfying (T1) and (T2).
Then T satisfies (T3) if and only if
L
RHomOX (T, E) ⊗A T ∼
=E
for every object E ∈ D b (coh(X)).
Proof. If (T1) and (T2) hold then one needs only LG ◦ RF (E) ∼
= E for every object
E ∈ D b (coh(X)).
Example 2.3. For X = {x}, a point, the trivial bundle Ox determines both the
algebra A = Hom(Ox , Ox ) ∼
= k and the equivalence of abelian categories
F (−) = Γ(x, −) : coh(x) → mod(A),
where mod(A) is the category of finite dimensional k-vector spaces. Clearly RF is
a derived equivalence.
While our interest in these lectures lies primarily with smooth projective varieties,
we observe in passing that the previous example generalises to any affine variety X.
The trivial bundle OX determines both the k-algebra A = Hom(OX , OX ) ∼
= H 0 (OX )
and the equivalence of abelian categories
F (−) = Γ(X, −) : coh(X) → mod(A),
where mod(A) is the category of finite dimensional H 0 (OX )-modules. Again, RF
is a derived equivalence.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
9
2.3. If X admits a tilting sheaf then understanding D b (coh(X)) via the bounded
derived category of mod(Aop ) is a significant simplification. For example, we have
already seen that the module category mod(A) has finite length, and can be visualised via the corresponding bound quiver (Q, R). The key question, then, becomes
existence: which varieties admit tilting bundles? We now present a strong necessary
condition for the existence of a tilting bundle.
The Grothendieck group of an abelian category was introduced in lecture 1. The
map sending an object E ∈ D b (A) in the bounded derived category to the sum
P
[E] := i (−1)i [E i ] ∈ K(A) in the Grothendieck group gives a well-defined map
[
] : D b (A) → K(A)
that is compatiable with the additive structure, in the sense that [E ⊕F ] = [E]+[F ].
It is well-known that the Grothendieck group K(coh(X)) of a smooth projective
variety admits a bilinear form
X
[E], [F ] :=
(−1)i dimk ExtiOX (E, F ).
i
called the Mukai pairing. As for K(mod(A)), one can show that the global dimension of a k-algebra A is the minimal number d ∈ N such that Extk (M, N ) = 0 for
all k > d and all M, N ∈ mod(A). In particular, if A has finite global dimension
then a similar formula determines a bilinear form on K(mod(A)), namely
X
[M ], [N ] :=
(−1)i dimk ExtiA (M, N ).
i
Proposition 2.4. Let T be a tilting sheaf on a smooth projective variety X with
A := EndOX (T ). The homomorphism [RF (−)] : K(coh(X)) −→ K(mod(Aop )) defined by
X
(−1)i ExtiOX (T, −)
[RF (−)] =
i
is an isomorphism that preserves the natural bilinear forms on either side.
Exercise 2.5. Prove it.
Corollary 2.6. If a smooth projective variety X is to admit a tilting sheaf, then
its Grothendieck group of coherent sheaves must be finitely generated and free.
Proof. Combine Proposition 2.4 with Theorem 1.12.
2.4. Strongly exceptional sequences. We now relate the notion of tilting sheaf
to the more algebro-geometric notion of full strongly exceptional sequence. First,
recall that for coherent sheaves E, F , we have
HomDb (coh(X)) (E, F [k]) = ExtkOX (E, F ).
An object E in a triangulated category D is exceptional if
HomD (E, E) = k and HomD (E, E[k]) = 0 for k 6= 0.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
10
A sequence (E0 , E1 , . . . , Em ) of exceptional objects is called exceptional if
RHomD (Ei , Ej ) = 0 for i > j,
and strongly exceptional if in addition
HomD (Ei , Ej [k]) = 0 for i < j and k 6= 0.
The sequence is full (or complete) if E0 , E1 , . . . , Em generate D as a triangulated
category.
L
Proposition 2.7. Let T be a locally-free sheaf on X, and T = m
i=0 Ei a decom-
position into locally-free sheaves satisfying HomOX (Ei , Ei ) = 0 for all i = 0, . . . , m,
e.g., each Ei is a line bundle. Then
(i) If T satisfies conditions (T1) and (T2) then, by reordering if necessary, the
list (E0 , E1 , . . . , Em ) forms a strongly exceptional sequence.
(ii) If, in addition, T satisfies (T3) then (E0 , E1 , . . . , Em ) is a full strongly exceptional sequence.
Conversely, every full strongly exceptional sequence defines a tilting sheaf.
Proof. Since T satisfies (T2), we have
(2.1)
0 = ExtkOX (T, T ) =
M
ExtkOX (Ei , Ej )
i,j
for k > 0, which implies all relevant higher Ext-vanishing statements. Each Ei is
then exceptional because projectivity of X gives HomOX (Ei , Ei ) = H 0 (OX ) = k.
We now show that we may list the sheaves so that HomOX (Ei , Ej ) = 0 for i >
j. For 0 ≤ i 6= j ≤ m, one of the vector spaces HomOX (Ei , Ej ), HomOX (Ej , Ei )
must be trivial, otherwise HomOX (Ei , Ei ) 6= k which is absurd, and we relabel to
ensure that i < j whenever HomOX (Ei , Ej ) 6= 0. Repeat, employing the condition
HomOX (Ei , Ei ) = k to see that the procedure can be carried out consistantly. This
proves part (i), while part (ii) is immediate.
For the converse, equation (2.1) guarantees that a strongly exceptional sequence
L
(E0 , E1 , . . . , Em ) gives a sheaf T :=
i Ei satisfying (T2). Define the algebra
L
A := EndOX
i Ei . The conditions imposed on the Hom-groups of the Ei imply
that A is isomorphic to the quotient algebra kQ/hRi of an acyclic bound quiver
(Q, R). This implies that A is isomorphic to an algebra of lower triangular matrices,
from which it follows that A has finite global dimension. Given (T1) and (T2), the
L
fullness of the sequence then implies that T = i Ei satisfies (T3).
2.5. In the course of proving the previous result we constructed the endomorphism
algebra of a tilting bundle as an acyclic bound quiver. For the examples of interest
in these lectures, the relations that arise are of the form p − p′ ∈ R.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
11
Example 2.8. The algebra A := kQ/hRi arising from the bound quiver in ExamL
ple 1.10 is isomorphic to the endomorphism algebra of T := ni=0 OPn (i). It is not
hard to show that (OPn , OPn (1), . . . , OPn (n)) form a strongly exceptional sequence
on Pn . It is much harder to show that the sequence is full or, equivalently, that T
satisfies (T3). We’ll take this up shortly.
Example 2.9. On P1 × P1 , consider the line bundles O, O(1, 0), O(0, 1), O(1, 1),
where O(1, 0) is the pullback of O(1) via the first projection, and O(0, 1) is the
pullback of O(1) via the second projection. The quiver of sections that encodes the
endomorphism algebra of the direct sum of these bundles is shown:
7
◦
◦
8
3
4
◦
5
1
6
◦
2
Example 2.10. Let X = dP6 denote the del Pezzo surface of degree 6 obtained
by blowing up P2 at three points (this variety arises as the apex of the ‘roof’ in the
plane Cremona transformation). The trivial bundle, the triple of line bundles that
give morphisms to P1 , and the pair of line bundles defining morphisms to P2 encode
the quiver as shown:
◦
◦
◦
◦
◦
◦
The construction of quivers from collections of line bundles on simple varieties
such as these will be taken up in the next lecture.
3. Lecture 3: The derived category of smooth toric del Pezzos
We now investigate the bounded derived category of smooth toric Fano varieties
of dimension two.
3.1. Every smooth (projective) toric surface X over k arises as follows. For a
rank two lattice N ∼
= Z2 , let Σ ⊂ N ⊗Z Q ∼
= Q2 be a strongly convex rational
polyhedral fan (= collection of cones that intersect only along faces) whose support
is the whole of Q2 , where each two-dimensional cone is generated by a basis of
the lattice N . Each cone σ ∈ Σ defines a copy of A2k , and the glueing data of
these local charts is encoded in the intersections between cones in the fan. The
strongly convex assumption ensures that the origin is a face of each cone, which
implies that every A2 contains a common algebraic torus TX := N ⊗Z k∗ ∼
= (k∗ )2 .
k
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
12
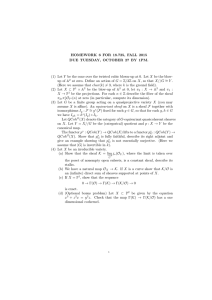
If one requires that X is Fano (= −KX is ample) then there are only five examples:
P2 , P1 × P1 , F1 , Blx (F1 ) and dP6 whose fans are shown below:
2
3
3
3
1
4
1
3
2
1
2
(a) P1 × P1
2
4
(b) P2
(c) F1
1
4
(d) dP6
Figure 1. Fans for four of the five smooth toric del Pezzos
For a global description of X and coherent sheaves on X, write Σ(1) for the
set of one-dimensional cones in Σ. Each ρ ∈ Σ(1) corresponds to a TX -invariant
Weil divisor Dρ on X, and these divisors generate the free abelian group ZΣ(1) of
TX -invariant Weil divisors, and there is an exact sequence
(3.1)
deg
0 −−−−→ M −−−−→ ZΣ(1) −−−−→ Pic(X) −−−−→ 0
where M := Hom(N, Z) is the dual lattice. For a line bundle L on X and a global
section s ∈ H 0 (X, L), div(s) denotes the effective Cartier divisor determined by s.
The total coordinate ring of X is the polynomial ring S := k[xρ : ρ ∈ Σ(1)] obtained
as the semigroup algebra of the semigroup NΣ(1) of TX -invariant effective divisors.
The map deg induces a Pic(X)-grading of S, where induced by deg(xu ) := deg(u).
In particular, the algebraic torus Hom(Pic(X), k∗ ) acts on S and hence on AΣ(1) :=
Spec(S). For a cone σ ∈ Σ, write σ
b for the set of one-dimensional cones in Σ that
Q
are not contained in σ, and write xσb = ρ∈bσ xρ for the associated monomial in S.
Consider the monomial ideal B := xσb : σ ∈ Σ . Cox [10, Theorem 2.1] shows that
the toric variety X is isomorphic to the geometric of the complement AΣ(1) r V(B)
by the action of the torus Hom(Pic(X), k∗ ) that is induced by the Pic(X)-grading
of S. In addition, Cox [10, Theorem 3.2] estabishes that every coherent sheaf on X
arises from a finitely-generated Pic(X)-graded S-module.
3.2. Quivers of sections. Let (L0 , . . . , Lr ) be a list of distinct line bundles on
the projective toric variety X. A TX -invariant section s ∈ H 0 (X, Lj ⊗ L−1
i ) is
indecomposable if the divisor div(s) cannot be expressed as a sum div(s′ ) + div(s′′ )
−1
′′
0
where s′ ∈ H 0 (X, Lk ⊗ L−1
i ) and s ∈ H (X, Lj ⊗ Lk ) are nonzero TX -invariant
sections and 0 ≤ k ≤ r. The (complete) quiver of sections of the list is the quiver Q
in which the vertices Q0 = {0, . . . , r} correspond to the line bundles, and the arrows
from i to j correspond to the indecomposable TX -invariant sections in H 0 (X, Lj ⊗
−1
−1
0
0
L−1
i ). Since X is projective, at least one of H (X, Lj ⊗ Li ) and H (X, Lj ⊗ Li )
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
13
is zero for j 6= i, so Q is acyclic. Note that Q depends only on the line bundles
Lj ⊗ L−1
where 0 ≤ i, j ≤ r, so we normalise by setting L0 = OX . If we assume
i
that H 0 (X, Li ) 6= 0 for 0 ≤ i ≤ r then Q is connected and has a unique source at
0 ∈ Q0 .
Since each arrow a ∈ Q1 corresponds to a TX -invariant section s ∈ H 0 (X, Lj ⊗
Σ(1) . More generally, for a path p =
L−1
i ), we simply write div(a) := div(s) ∈ Z
a1 · · · aℓ in Q, we set div(p) := div(a1 ) + · · · + div(aℓ ). This labelling of paths
induces relations R on Q, where a difference of paths p − p′ lies in R if tl(p) = tl(p′ ),
hd(p) = hd(p′ ) and div(p) = div(p′ ). The pair (Q, R) is the bound quiver of sections
of the line bundles.
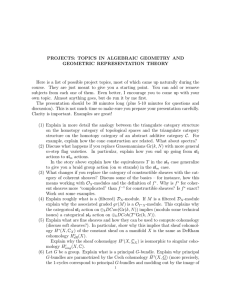
Example 3.1. Let X = F1 = P OP1 ⊕OP1 (1) be the Hirzebruch surface obtained as
the one-point blow-up of P2 . For (k, ℓ) ∈ Z2 , we write OX (k, ℓ) := OX (kD1 +ℓD4 ) ∈
Pic(X). The complete quiver of sections for OX , OX (1, 0), OX (0, 1), OX (1, 1) appears in Figure 2 (a). If we order the arrows as in Figure 2 (b), then the set of
x1
x3
3
2
x4
x
2
x4
0
x1
x3
1
(a) Quiver of sections
a6
a7
3
a3
a4
2
a5
0
a1
a2
1
(b) Listing the arrows
Figure 2. Hirzebruch surface F1
relations is R = {a3 a6 − a1 a5 , a3 a7 − a2 a5 , a2 a4 a6 − a1 a4 a7 }. These relations arise
from pairs of paths from vertex 0 to vertex 3 labelled with the divisors D1 + D4 ,
D3 + D4 and D1 + D2 + D3 .
Proposition 3.2. If (Q, R) is the complete bound quiver of sections for (L0 , . . . , Lr )
Lr
then the quotient algebra kQ/hRi is isomorphic to End
i=0 Li .
Proof. The map sending a path p = a1 · · · aℓ in Q to the product of the corresponding sections s1 · · · sℓ ∈ H 0 (X, Lhd(p) ⊗ L−1
tl(p) ) = Hom(Ltl(p) , Lhd(p) ) determines a
homomorphism of k-algebras η from the path algebra of Q to the endomorphism
L
algebra of ri=0 Li . The map is surjective because Q is a complete quiver. More-
over, η sends paths p, p′ in Q satisfying tl(p) = tl(p′ ) and hd(p) = hd(p′ ) to the
same element in Hom(Ltl(p) , Lhd(p) ) if and only if div(p) = div(p′ ). Thus, we have
Ker(η) = hRi.
Under mild positivity assumptions on the line bundles, one can reconstruct the
variety X directly from the algebra kQ/hRi (see Craw–Smith [13]).
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
14
3.3. We now reconsider condition (T3) for a tilting sheaf. Write π1 , π2 : X ×X → X
for the first and second projections and let ι : ∆ ֒→ X × X denote the diagonal
embedding.
Lemma 3.3. The functor
L
R(π2 )∗ π1∗ (−) ⊗ O∆ : D b (coh(X)) → D b (coh(X))
is naturally isomorphic to the identity.
L
Proof. For E ∈ D b (coh(X)), consider R(π2 )∗ π1∗ (E) ⊗ O∆ . The projection formula
for ι gives
L
L
L
Rι∗ Lι∗ (F ) ⊗ OX ∼
= F ⊗ Rι∗ (OX ) ∼
= F ⊗ O∆ ,
for F ∈ D b (coh(X × X)), therefore
L
R(π2 )∗ π1∗ (E) ⊗ O∆
L
∼
= R(π2 )∗ Rι∗ Lι∗ (π1∗ (E)) ⊗ OX
L
∼
= R(π2 ◦ ι)∗ L(π1 ◦ ι)∗ (E) ⊗ OX
This is isomorphic to E since both π2 ◦ ι and π1 ◦ ι coincide with the identity.
Exercise 3.4. Show that RΓ ◦ RHom(T, −) ∼
= RHom(T, −) for T ∈ D b (coh(X)).
Lemma 3.5. There is a natural isomorphism R(π2 )∗ ◦ π1∗ (−) ∼
= RΓ(−) ⊗ OX .
Proof. Apply flat base change for the square
π
X × X −−−2−→
π1 y
X
f
X
gy
−−−−→ Spec(k)
to obtain an isomorphism of functors R(π2 )∗ ◦ π1∗ (−) ∼
= g∗ Rf∗ (−). Since both f
and g are the structure morphism for X, we have g∗ (−) ∼
= − ⊗ OX and Rf∗ (−) ∼
=
RΓ(−).
3.4. Resolution of the diagonal. We now restrict to the case where the coherent
sheaf T is locally-free, so the (derived) dual is simply T ∨ := Hom(T, OX ). Set
A = HomOX (T, T ). Note that T is a left A-module and T ∨ is a right A-module.
By pulling back via the first and second projections, π2∗ (T ) and π1∗ (T ∨ ) become left
and right A-modules respectively, so
L
L
T ∨ ⊠A T := π1∗ (T ∨ ) ⊗A π2∗ (T )
is an object of D b (coh(X × X)). The main result of this lecture is due to King [20],
generalising the celebrated result of Beilinson [2]:
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
15
Proposition 3.6. Let T be a locally-free sheaf on X satisfying (T1) and (T2). If
there is an isomorphism
L
T ∨ ⊠A T −→ O∆
(3.2)
in D b (coh(X × X)) then T is a tilting bundle, and (3.2) is a resolution of the
diagonal.
Proof. Suppose that T ∨ ⊠A T −→ O∆ is an isomorphism. Corollary 2.2 shows that
we need only prove that LG◦RF is isomorphic to the identity. The previous lemma
and the exercise above gives
L
L
L
(LG◦RF )(E) = RHom(T, E)⊗A T ∼
= RΓ(E⊗T ∨ )⊗A T ∼
= R(π2 )∗ π1∗ (E⊗T ∨ ) ⊗A T.
A (modified) projection formula combined with the exercise above gives
L
L
R(π2 )∗ π1∗ (E ⊗ T ∨ ) ⊗A T ∼
= R(π2 )∗ π1∗ (E ⊗ T ∨ ) ⊗A π2∗ (T )
L
L
∼
= R(π2 )∗ π1∗ (E) ⊗OX×X π1∗ (T ∨ ) ⊗A π2∗ (T ) .
Thus, we now have
L
L
L
∗
∨
π
(E)
⊗
T
⊠
T
.
RHom(T, E) ⊗A T ∼
R(π
)
=
A
2 ∗
OX×X
1
Compare this with the isomorphism from Lemma 3.3:
L
E∼
= R(π2 )∗ π1∗ (E) ⊗OX×X O∆ ,
L
∼
L
The map T ∨ ⊠A T −→ O∆ forces the natural map RHom(T, E) ⊗A T → E to be
an isomorphism. This means that T satisfies (T3) as required.
3.5. We conclude this lecture by describing the bounded derived category on the
smooth toric del Pezzo surfaces. Let us suppose for now that we have chosen a
collection of line bundles on X whose direct sum satisfies (T1) and (T2). The next
L
step is to describe T ∨ ⊠A T explicitly in terms of the bound quiver of sections (Q, R)
of the line bundles.
Since M ⊗A N = M ⊗A A ⊗A N for a left A-module N and a right A-module
L
M , the derived tensor product π1∗ (T ∨ ) ⊠A π2∗ (T ) can be computed as the double
complex π1∗ (T ∨ ) ⊗A P ⊗A π2∗ (T ), where P is the minimal projective resolution of A
in the category of modules over Ae := Aop ⊗k A. To describe P , we write pop for
the element in Aop corresponding to p ∈ A. If we write {ei : i ∈ Q0 } for the set
of primitive orthogonal idempotents in A then the elements eop
i ⊗ ej for i, j ∈ Q0
e
form a complete set of primitive orthogonal idempotents in Ae , and (eop
i ⊗ ej )A is
a complete set of representatives from the isomorphism classes of indecomposable
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
16
projective Ae -modules. With this notation, the first terms in a minimal resolution
P of A over Ae have the form
→
M
δ
2
e
(eop
hd(p) ⊗ etl(p) )A −→
M
δ
1
e
(eop
hd(a) ⊗ etl(a) )A −→
δ
0
e
(eop
i ⊗ ei )A −→ A → 0
i∈Q0
a∈Q1
r∈Q2
M
where Q2 is a well-chosen basis of hRi consisting of differences p − p′ ∈ R, and the
maps are determined by
δ0 (eop
i ⊗ ei ) = ei ,
op
op
δ1 (eop
hd(a) ⊗ etl(a) ) = a ⊗ ehd(a) − etl(a) ⊗ a,
and
δ2 (eop
h ⊗ et ) =
ℓ
P
j=1
op
aop
1,1 · · · a1,j−1 ⊗ a1,j+1 · · · a1,ℓ −
k
P
j=1
op
aop
2,1 · · · a2,j−1 ⊗ a2,j+1 · · · a2,k ,
where r = p − p′ = a1,1 · · · a1,ℓ − a2,1 · · · a2,k ∈ Q2 and h = hd(r), t = tl(r).
The divisors labelling the arrows in Q allows one to lift P to a complex of Pic(X)graded free modules over the total coordinate ring S × S = k[xρ , wρ : ρ ∈ Σ(1)] of
X × X. The assignment sending a ∈ Q1 to div(a) ∈ ZΣ(1) extends to a k-linear
map div : Ae → S × S where div(pop ⊗ q) = wdiv(p) xdiv(q) . Applying this to P , we
obtain a Pic(X × X)-graded complex E of S × S-modules of the form
... →
M
(S × S)(r) −→
M
(S × S)(a) −→
a∈Q1
r∈Q2
M
(S × S)(ei )
i∈Q0
where (S × S)(q) is the free Pic(X × X)-graded S × S-module with one generator
q in degree (−[Lhd(q) ], [Ltl(q) ]). In general this complex is not a resolution of the
graded S × S-module that defines O∆ . However, one can say the following: extend
P
scalars over Q in (3.1) and set := {u = ρ λρ eρ ∈ QΣ(1) : 0 ≤ λρ < 1}.
Theorem 3.7. Let X be one of the five smooth toric del Pezzo surface. Let T be the
direct sum of the line bundles {L ∈ Pic(X) : L = deg(u) for some u ∈ }. Then T
is a tilting bundle on X, so the functor
RHom(T, −) : D b (coh(X)) −→ D b (mod(Aop ))
is a derived equivalence for A = End(T ).
3.6. The projective plane. The resolution of the diagonal for Pn a celebrated
result of Beilinson [2] (see Căldăraru’s lecture notes for a very nice account). In
the case of P2 we have (0, 0, 0), ( 21 , 12 , 0), ( 23 , 23 , 23 ) ∈ , and deg (0, 0, 0) = OP2 ,
L
deg ( 21 , 12 , 0) = OP2 (1) and deg ( 32 , 23 , 23 ) = OP2 (2). Set T = 2i=0 OP2 (i). Next,
L
calculate the resolution T ∨ ⊠A T → O∆ for P2 using the projective resolution of A
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
17
given above:
e
(eop
2 ⊗ e0 )A
⊕3
δ
2
−→
e ⊕3
(eop
1 ⊗ e0 )A
e
(eop
0 ⊗ e0 )A
⊕
δ
1
e
⊕
−→
(eop
1 ⊗ e1 )A
⊕3
op
e
(e2 ⊗ e1 )A
⊕
op
(e2 ⊗ e2 )Ae
Having T = OP2 ⊕ OP2 (1) ⊕ OP2 (2) gives T ∨ = OP2 ⊕ OP2 (−1) ⊕ OP2 (−2), and hence
(or by the complex of S×S-modules given above), the complex π1∗ (T ∨ )⊗A P ⊗A π2∗ (T )
is
O ⊠O
⊕3
O(−1) ⊠ O
⊕
⊕3 δ2
δ1
−→
⊕
O(−2) ⊠ O
−→ O(−1) ⊠ O(1)
⊕3
⊕
O(−2) ⊠ O(1)
O(−2) ⊠ O(2)
One can verify that the given complex of S × S-modules gives a resolution of the
diagonal. To compare this with Beilinson’s resolution, use the Euler sequences
0
O(−1) ⊠ Ω1 (1)
O(−1) ⊠ O ⊕3
O(−1) ⊠ O(1)
0
0
O(−2) ⊠ Ω2 (2)
O(−2) ⊠ O ⊕3
O(−2) ⊠ Ω1 (2)
0
and
L
∼
to see that the resolution T ∨ ⊠A T −→ O∆ is quasi-isomorphic to the resolution
0
O(−2) ⊠ Ω2 (2)
O(−1) ⊠ Ω1 (1)
O ⊠O
O∆
0.
This is the classical statement of Beilinson’s resolution on P2 .
Exercise 3.8. The goal of this exercise is to compute the derived category for each
of the remaining smooth toric del Pezzo surfaces.
(1) Compute the set {L ∈ Pic(X) : L = deg(u) for some u ∈ } for each of the
five toric del Pezzo surfaces;
(2) Calculate the quiver of sections of the resulting line bundles.
As a check, compare with the pictures of the quivers that appeared at the end of
lecture 2 (see also the case for F1 from Figure 2).
4. Lecture 4: On the derived McKay correspondence conjecture
In this section we apply derived category methods to provide an elegant explanation for the McKay correspondence in dimension n ≤ 3. This correspondence arises
naturally in mathematics via the geometry and representation theory of Gorenstein quotient singularities, and in physics in the context of D-branes on certain
Calabi–Yau orbifolds.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
18
4.1. The classical statement. Finite subgroups of SL(2, C) are classified up to
conjugacy as
• the cyclic group of order n ≥ 2 generated by the transformations (x, y) →
(εx, εn−1 y) for εn = 1;
• the binary dihedral group of order 4n (for n ≥ 2) generated by the pair
(x, y) → (−y, x) and (x, y) → (εx, ε2n−1 y) for ε2n = 1;
• one of three exceptional cases obtained as the lift under the double cover
SU(2) → SO(3) of the symmetry group of a Platonic solid: the binary
tetrahedral, binary octahedral or binary icosahedral groups of order 24, 48
and 120 respectively.
In each case, the quotient singularity X = C2 /G defined by its ring of functions
C[x, y]G can be embedded as a hypersurface X ⊂ C3 with an isolated singularity
at the origin. This singular affine variety admits a unique resolution τ : Y → X =
C3 /G with the property that Y has trivial canonical bundle. The exceptional locus
of τ is a tree of rational curves C ∼
= P1 intersecting transversally, and we construct a
graph from this tree as follows: introduce one vertex for each irreducible exceptional
curve C, and join a pair of vertices by an edge if the corresponding curves intersect
in Y . The resulting graph is a Dynkin graph of ADE-type. The data of the group,
the defining equation and the ADE graph is recorded in Table 1.
Conjugacy class of G
cyclic Z/nZ
binary dihedral D4n
binary tetrahedral T24
binary octahedral O48
binary icosahedral I120
Defining equation of X
Dynkin graph
x2 + y 2 + z n = 0
+ y 2 z + z n+1 = 0
x2 + y 3 + z 4 = 0
x2 + y 3 + yz 3 = 0
x2 + y 3 + z 5 = 0
x2
An−1
Dn+2
E6
E7
E8
Table 1. Classification of Kleinian singularities.
John McKay [21] observed that the Dynkin graph for G can be constructed using
representation theory. Let V = C2 denote the two-dimensional representation given
by the inclusion G ⊂ SL(2, C) and write Irr(G) for the set of isomorphism classes
of irreducible representations. The McKay quiver Q of G ⊂ SL(2, C) has vertex set
Q0 := Irr(G), and there are aρρ′ := dimC HomC[G] (ρ, V ⊗ ρ′ ) arrows from ρ to ρ′ .
Example 4.1. Consider the A2 case. The given two-dimensional representation of
G∼
= Z/3Z in SL(2, C) is V = ρ1 ⊕ ρ2 , where ρk ∈ Irr(G) satisfies ρk (g) = ω k g for
k = 0, 1, 2 and ω a primitive third root of unity. For ρ′ = ρk we have
V ⊗ ρk = (ρ1 ⊕ ρ2 ) ⊗ ρk = ρk+1 ⊕ ρk−1 .
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
19
Thus, the McKay quiver has three vertices ρ0 , ρ1 , ρ2 wth arrows ρk+1 → ρk and
ρk−1 → ρk corresponding to the x- and y-coordinates respectively in V .
0
◦
1◦
◦2
Exercise 4.2. Draw the McKay quiver for An and suitably label the arrows.
For finite subgroups of SL(2, C), the arrows come in opposite pairs, and replacing
e Q . Let ΓQ denote the
every such pair by a single edge produces the McKay graph Γ
subgraph obtained from the McKay graph by removing the vertex corresponding to
the trivial representation and the edges emanating from that vertex.
e Q is an extended Dynkin graph of ADE type,
Theorem 4.3. The McKay graph Γ
and the subgraph ΓQ is the ADE graph of X = C2 /G given in Table 1, giving a
one-to-one McKay correspondence:
basis of H∗ (Y, Z) ←→ irreducible representations of G .
Proof. McKay [21] gives the original observation that forms the first statement.
Inspecting the vertices of the graph ΓQ establishes a one-to-one correspondence
between the exceptional curves C of the resolution τ : Y → X and the nontrivial
irreducible representations ρ of G. The exceptional curve classes [C] form a basis
for the homology H2 (Y, Z) so that, by adding the homology class of a point on one
side and the trivial representation on the other, we obtain the stated one-to-one
correspondence.
The McKay correspondence admits a beautiful geometric explanation that is best
described in terms of derived categories as we now describe.
4.2. For a finite subgroup G ⊂ GL(n, C), write V = Cn for the given representation. The action of G on V induces a dual action of G on the coordinate ring
S := C[x1 , . . . , xn ] of V . The McKay quiver Q is defined above, but an explicit
description of the appropriate set of relations R is hard to write down in general
(see Proposition 4.4 below). If G is abelian, however, then the given representation decomposes into one-dimensional representations V = ρ1 ⊕ . . . , ⊕ρn , and for
every vertex ρ ∈ Q there are n arrows with head at ρ denoted aρk : ρ ⊗ ρk → ρ for
1 ≤ k ≤ n. If we label the arrow aρk by the monomial xk , then the set
ℓ ρ
k ρ
aℓ : ρ ∈ Irr(G), 1 ≤ k ≤ n}
ak − aρ⊗ρ
R = {aρ⊗ρ
k
ℓ
of relations corresponds to the condition that the labelling monomials commute.
We call (Q, R) the bound McKay quiver of the abelian subgroup G ⊂ GL(n, C).
The set of relations R is chosen to ensure that the quotient algebra kQ/hRi is
isomorphic to the skew group algebra S ∗ G. As an S-module, the skew group
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
20
algebra is the free S-module with basis G, and the ring structure is given by setting
(sg)·(s′ g′ ) := s(g·s′ )gg′ for s, s′ ∈ S and g, g′ ∈ G. Note that since S = C[x1 , . . . , xn ]
has global dimension n by the Hilbert Syzygy Theorem, a well-known result from
noncommutative ring theory states that the skew group algebra S ∗G also has global
dimension n.
Proposition 4.4. Let G ⊂ GL(n, C) be a finite subgroup. There exists a set of
relations R in the McKay quiver Q such that the following are equivalent:
(i) the category repC (Q, R);
(ii) the category mod(S ∗ G);
(iii) the category G -coh(V ) of finitely-generated G-equivariant coherent sheaves
on Cn .
Proof. The set of relations R is constructed so that the skew group algebra S ∗ G
is Morita equivalent to the quotient algebra kQ/hRi. It follows that the module
categories over these algebras are equivalent. Proposition 1.6 implies that categories
(i) and (ii) are equivalent. Coherent sheaves on Cn are finitely-generated S-modules,
and an S-module M is G-equivariant if it has a G-action such that g · (sm) =
(g · s)(g · m) for g ∈ G, s ∈ S and m ∈ M . This immediately gives the equivalence
between (ii) and (iii).
4.3. Having described the algebraic side of the correspondence, we now consider the
geometric side. A natural generalisation for the minimal resolution of the singularity
X = C2 /G arising from a finite subgroup G ⊂ SL(2, C) is a crepant resolution of
an orbifold X = Cn /G arising from a finite subgroup G ⊂ SL(n, C). The special
linear condition ensures that X is Gorenstein, i.e., the canonical sheaf ωX is a line
bundle. In fact, the form dx1 ∧ · · · ∧ dxn on Cn is G-invariant under a special linear
action and hence it descends to give a globally defined nonvanishing holomorphic
n-form on X, forcing ωX to be trivial. A resolution τ : Y → X is said to be crepant
if τ ∗ (ωX ) = ωY ; this holds here if and only if ωY is also trivial, in which case we
call Y a (noncompact) Calabi–Yau manifold. Note that crepant resolutions need
not exist, and when they do they are typically nonunique.
4.4. The McKay correspondence conjecture. The guiding principle behind
the McKay correspondence was stated by Reid [23] along the following lines:
Principle 4.5. Let G ⊂ SL(n, C) be a finite subgroup. Given a crepant resolution
τ : Y → X = Cn /G, the geometry of Y should be equivalent to the G-equivariant
geometry of Cn . In particular, any two crepant resolutions of X should have equivalent geometries.
Here, the word ‘geometry’ was left deliberately vague but was known to hold
for suitably defined notions of Euler number and Hodge numbers when the principle was first proposed. More significantly, this principle, and indeed any geometric approach to the McKay correspondence owes a great debt to the pioneering
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
21
work of Gonzalez-Sprinberg–Verdier [15]. For a finite subgroup G ⊂ SL(2, C) with
minimal resolution Y → C2 /G, they constructed geometrically an isomorphism
K(coh(Y )) → K(mod(S ∗ G)) between the Grothendieck group of coherent sheaves
on Y and G-equivariant coherent sheaves on C2 .
4.5. Reid [22] suggested that one manifestation of Principle 4.5 should be a derived
equivalence
(4.1)
Φ : D b (coh(Y )) −→ D b (mod(S ∗ G)),
where D b (coh(Y )) is the bounded derived categories of coherent sheaves on Y and,
following the equivalence of categories from Proposition 4.4, we write D b (mod(S∗G))
for the bounded derived category of G-equivariant S-modules. One approach to this
conjecture is to construct a nonprojective analogue of a tilting bundle T on a given
crepant resolution Y for which EndOY (T ) = mod(S ∗ G). The fact that the algebra
S ∗ G has finite global dimension provides further evidence that this approach might
bare fruit.
With the timely publication of Bridgeland’s thesis in the summer of 1998, however, Bridgeland, King and Reid together realised that the right approach was to
construct the equivalence as a Fourier–Mukai transform. To describe this in more
detail, let π : Cn → X = Cn /G be the quotient morphism and τ : Y → X a resolution. Consider the commutative diagram
Y × Cn
(4.2)
πY
πV
Cn
Y
τ
π
X
where πY and πV are the projections to the first and second factors. Let G act
trivially on both Y and X, so that all morphisms in the above diagram are Gequivariant. By analogy with Mukai’s functor on the derived category of the elliptic
curve, the key step is to realise the resolution Y as a fine moduli space of certain
G-equivariant S-modules. Just as with the Poincaré sheaf for the elliptic curve, this
would imply that the product Y × Cn comes equipped with a universal sheaf F ,
such that for each point y ∈ Y , the restriction of F to the fibre π −1 (y) ∼
= Cn is the
Y
G-equivariant coherent sheaf Fy parametrised by the point y ∈ Y . Armed with this
universal sheaf, one can define a functor ΦF : D b (coh(Y )) −→ D b (mod(S ∗ G)) via
L
(4.3)
ΦF (−) = R(πV )∗ F ⊗ (πY )∗ (− ⊗ ρ0 ) .
In this formula: the tensor product with the trivial representation acknowledges
that G acts trivially on Y , enabling us to take the G-equivariant pullback via πY ;
and the pullback via πY need not be derived since πY is flat by virtue of Y being
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
22
a fine moduli space. Principle 4.5 suggests that Φ is an equivalence of triangulated
categories whenever τ is crepant.
4.6. To carry out the programme described above, a given resolution Y must be
constructed as a fine moduli space of certain G-equivariant S-modules. We now
construct the moduli space G -Hilb which provided the first examples for which the
McKay correspondence was established as a derived equivalence.
For any finite subgroup G ⊂ GL(n, C), the G-Hilbert scheme is the scheme
G -Hilb := G -Hilb(Cn ) parametrising G-clusters in Cn , that is, G-invariant, zerodimensional subschemes Z ⊂ Cn for which the space of global sections Γ(OZ ) is isomorphic as a C[G]-module to the regular representation of G; equivalently, G -Hilb
parametrises the (necessarily G-equivariant) S-modules arising from the structure
sheaves OZ of these subschemes. There is a projective and surjective Hilbert–Chow
morphism
τ : G -Hilb −→ Cn /G
that sends a G-cluster to its supporting G-orbit. Thus irrespecive of whether Y :=
G -Hilb is a resolution of Cn /G, the map τ fits into a commutative diagram of the
form (4.2). Any free G-orbit defines a point of G -Hilb, and the set of all such orbits
lie in a single irreducible component of G -Hilb (see [12, §5]).
The universal sheaf on Y × Cn is the structure sheaf OZ of the universal closed
subscheme Z ⊂ Y × Cn whose restriction to the fibre over y ∈ Y is the scheme
Zy ⊂ Cn parametrised by the point y. Moreover, since each fibre is isomorphic to
the regular representation as a C[G]-module, the pushforward T := (πY )∗ (OZ ) is a
vector bundle on Y that decomposes into a direct sum of vector bundles
M
T =
Rρ⊕ dim(ρ)
ρ∈Irr(G)
according to the decomposition of the regular representation, where rank(Rρ ) =
dim(ρ). Without loss of generality, we assume that the bundle Rρ0 corresponding
to the trivial representation ρ0 is the trivial bundle.
4.7. Classical McKay revisited. To conclude this lecture we state the derived
McKay correspondence in dimension two. In the form stated below, the result is
due to Ito–Nakamura [16] and Kapranov–Vasserot [17] (though the later result was
known also to Gonzalez–Sprinberg and Verdier [15]).
Theorem 4.6. Let G ⊂ SL(2, C) be a finite subgroup and let τ : Y → C2 /G be the
unique crepant resolution.
(i) The variety Y is isomorphic to the G-Hilbert scheme G -Hilb(C2 );
(ii) The functor ΦOZ with kernel the universal sheaf on G -Hilb is an equivalence
of derived categories
ΦOZ : D b (coh(Y )) −→ D b (mod(S ∗ G)).
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
23
Corollary 4.7. The classical McKay correspondence Theorem 4.3 holds.
Proof of the Corollary given Theorem 4.6. The equivalence ΦF induces an isomorphism of Grothendieck groups ϕ : K(coh(Y )) → K(mod(S ∗ G)) as in Proposition 2.4. The map K(coh(Y )) → H 0 (Y, Z) ⊕ H 2 (Y, Z) sending the class of a sheaf
[E ] to (rank(E ), c1 (E )) is an isomorphism of groups, as is that from K(mod(S ∗ G))
to the underlying the representation ring of G. Now inspect the bases on each
side.
Exercise 4.8. For the An case, compute explicitly the monomial ideals that define
torus-invariant points of G -Hilb and hence compute the tautological line bundles
{Rρ : ρ ∈ Irr(G)} on G -Hilb. Observe that the first Chern classes of these bundles
(for ρ 6= ρ0 ) form the basis of H 2 (Y, Z) that is dual to the basis of H2 (Y, Z) given
by the irreducible components of the exceptional curve.
5. Lecture 5: Mukai =⇒ McKay
5.1. Bridgeland–King–Reid presented a significant generalisation of Theorem 4.6
in the celebrated paper [6]. Given a morphism τ : Y → X, the fibre product of Y
with itself over X is a scheme with underlying set given by
Y ×X Y = (y, y ′ ) ∈ Y × Y : τ (y) = τ (y ′ ) .
Theorem 5.1. Let G ⊂ SL(n, C) be a finite subgroup. If the irreducible component
Y ⊆ G -Hilb containing the free G-orbits satisfies dim Y ×X Y ≤ n + 1, then:
(1) the morphism τ : Y → X is a crepant resolution; and
(2) the functor ΦOZ with kernel the universal sheaf for G -Hilb is an equivalence
of derived categories
ΦOZ : D b (coh(Y )) −→ D b (mod(S ∗ G)).
Remark 5.2. The condition on the dimension of the fibre product always holds
for finite G ⊂ SL(n, C) with n ≤ 3, because dim(Y ×X Y ) is at most twice the
dimension of the exceptional locus; this equals one for n = 2 and two for n = 3.
However, for n ≥ 4 this condition rarely holds.
The approach to the proof of Bridgeland, King and Reid was fundamentally different in spirit from that of Kapranov and Vasserot in proving Theorem 4.6. Rather
than beginning with a moduli construction of a fixed crepant resolution, they took
as their starting point the moduli space G -Hilb(Cn ) and introduced a necessary
condition for the variety G -Hilb(Cn ) to be a crepant resolution of Cn /G. The remarkable point of their construction is that, whenever this necessary condition is
satisfied, the morphism τ : G -Hilb(Cn ) → Cn /G sending a G-cluster to its supporting G-orbit is shown to be a crepant resolution only after the equivalence of derived
categories has been established.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
24
5.2. We now present a roadmap for the proof of Theorem 5.1. To simplify our
discussion, we make several rather outrageous assumptions: firstly, that Y is projective; and secondly, that τ : G -Hilb → X is a crepant resolution. The projectivity
assumption is patently false (!), but it simplifies the discussion.
Set Y = G -Hilb and consider the integral functor ΦOZ defined by (4.3). The
goal is to establish that ΦOZ is a derived equivalence by using the following result
of Mukai, Bondal–Orlov and Bridgeland (see Căldăraru [8] for a similar statement
and for the interpretation as an isometry):
Theorem 5.3. Let Y be a smooth projective variety and let D be an indecomposable
triangulated category that admits a Serre functor. Let Φ : D b (coh(Y )) → D be an
exact functor that admits a left adjoint. The functor Φ is fully faithful if and only
if for all1 i ∈ Z and y, y ′ ∈ Y , we have
HomD (Φ(Oy ), Φ(Oy′ )[i]) ∼
= HomDb (coh(Y )) (Oy , Oy′ [i]).
If, in addition, Φ commutes with the Serre functors then Φ is a derived equivalence.
In fact, Theorem 5.3 is a special case of a result of Bridgeland that applies to
exact functors between (almost) arbitrary triangulated categories. In our case, since
Y is smooth and projective, the skyscraper sheaves {Oy : y ∈ Y } form a spanning
class in D b (coh(Y )), that is, they form the appropriate notion of an orthogonal basis
in D b (coh(Y )).
5.3. We ignore indecomposabilty, other than to note that the triangulated category
D b (mod(S ∗ G)) is indecomposable.
Sketch proof. Since Y is projective (!), we may apply a G-equivariant version of
Grothendieck duality due to Neeman, and hence, as in Căldăraru [8, §5.2], the
functor Ψ : D b (mod(S ∗ G)) −→ D b (coh(Y )) defined by
iG
h
L
L
,
Ψ(−) := R(πY )∗ πV∗ (−) ⊗ OZ∨ ⊗ πV∗ (ωV )[n]
is left-adjoint to ΦOZ (note that taking the G-invariant part is adjoint to the functor
that forms the tensor product by the trivial representation of G). Theorem 5.3
implies that ΦOZ is fully faithful if for D = D b (mod(S ∗ G)) we have
0 if y 6= y ′ or i 6∈ [0, n]
i
(5.1) HomD Φ(Oy ), Φ(Oy′ )[i] = ExtOX (Oy , Oy′ ) =
C if y = y ′ and i = 0,
for i ∈ Z and y, y ′ ∈ Y . The kernel gives Φ(Oy ) = OZy where Zy ⊂ Cn is the
G-cluster corresponding to the point y ∈ Y , and Hom-groups in D b (mod(S ∗ G))
1Strikingly, we need not verify the isomorphism for the difficult 0 < i ≤ dim Y and y = y ′ cases,
when Exti (Oy , Oy ) 6= 0. Take care though: [6] cites a theorem for the equivalence that does not
state this crucial point.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
25
are the G-invariant part of Ext-groups, so
HomDb (mod(S∗G)) Φ(Oy ), Φ(Oy′ )[i] = G -ExtiS (OZy , OZy′ ).
It’s easy to see that the i = 0 and y = y ′ case is simply G -HomS (OZy , OZy ) =
G -HomS (S/IZy , S/IZy ) = C. Also, the Ext groups ExtiS (OZy , OZy ) vanish for i 6∈
[0, n], hence so do the G -Ext groups.
It remains to treat the case when y 6= y ′ . The G-clusters Zy and Zy′ are disjoint
when their supporting G-orbits τ (y), τ (y ′ ) ∈ Cn satisfy τ (y) 6= τ (y ′ ), so
(5.2)
(y, y ′ ) ∈ Y × Y with τ (y) 6= τ (y ′ ) =⇒ G -ExtiS (OZy , OZy′ ) = 0
for all i ∈ Z.
Otherwise y 6= y ′ and τ (y) = τ (y ′ ), so the pair y, y ′ ∈ Y satisfies (y, y ′ ) ∈ Y ×X Y r∆,
where ∆ is the diagonal. The assumption that G ⊂ SL(n, C) implies that ωCn
is a (trivial) G-equivariant coherent sheaf. Moreover, our spurious projectivity
assumption on Y enables us to apply Serre duality2 on Cn to obtain
G -Extn (OZy , OZy′ ) ∼
= G -Hom(OZy′ , OZy ) = 0
(omitting the dual). Since the global dimension of S ∗ G is n we obtain
(5.3)
(y, y ′ ) ∈ Y ×X Y with y 6= y ′ =⇒ G -Exti (OZy , OZy′ ) = 0 unless 1 ≤ i ≤ n − 1.
The assumption dim(Y ×X Y ) ≤ n + 1 in Theorem 5.1 is imposed to ensure that
these groups vanish for all i ∈ Z. To see how this works we pause to recall a result
of Bridgeland–Maciocia [7].
5.4. Consider Q ∈ D b (coh(Y )). The support of Q, denoted supp(Q), is defined
to be the closed subset of Y obtained as union of the supports of the cohomology
sheaves Hi (Q) of Q. The homological dimension of E is the smallest integer d such
that Q is quasi-isomorphic to a complex of locally-free sheaves of length d; write
homdim(Q) = d.
Lemma 5.4 (Bridgeland–Maciocia [7]). For any scheme Y , fix Q ∈ D b (coh(Y ))
and y ∈ Y . Then
y ∈ supp(Q) ⇐⇒ ∃ i ∈ Z such that HomDb (coh(Y )) (Q, Oy [i]) 6= 0.
The proof of this lemma involves a simple spectral sequence argument. The proof
of the next lemma, however, is the geometric interpretation of a deep commutative
algebra result called the intersection theorem:
Proposition 5.5 (Bridgeland–Maciocia [7]). For a quasiprojective scheme Y , let
Q ∈ D b (coh(Y )) be a nonzero object and d ∈ Z≥0 . Then homdim(Q) ≤ d if and
2Our assumption that Y is projective is silly enough to imply that Cn is also projective!!
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
26
only if there exists j ∈ Z such that for all y ∈ Y ,
HomDb (coh(Y )) (Q, Oy [i]) = 0
unless j ≤ i ≤ j + d.
Moreover, the inequality codim(supp(Q)) ≤ homdim(Q) holds.
This result will be used in the form codim(supp(Q)) > homdim(Q) =⇒ Q ∼
= 0.
5.5. We now return to the proof of the theorem.
Sketch proof revisited. Suppose for the moment that we can find Q ∈ D b (coh(Y ×Y ))
such that
(5.4)
HomDb (coh(Y ×Y )) (Q, O(y,y′ ) [i]) = G -ExtiS (OZy , OZy′ ).
Suppose that the restriction of the object Q to Y × Y r ∆ is nonzero. Note that
(5.2) with Lemma 5.4 =⇒ supp(Q|Y ×Y r∆ ) ⊂ Y ×X Y r ∆.
The assumption from the statement of Theorem 5.1 now implies that
dim supp(Q|Y ×Y r∆ ) ≤ n + 1,
However, if we compare this with
i.e.,
codim supp(Q|Y ×Y r∆ ) ≥ n − 1.
(5.3) with Proposition 5.5 =⇒ homdim(Q|Y ×X Y r∆ ) ≤ n − 2.
and apply the last statement of the intersection theorem, we obtain Q|Y ×X Y r∆ ∼
= 0.
Now chase the logic backwards: since Q is supported on ∆, Lemma 5.4 together
with (5.4) imply that
G -ExtiS (OZy , OZy′ ) = 0
for all (y, y ′ ) ∈ Y ×X Y r ∆.
This is the final piece of G -Ext-vanishing that we require to apply the result of
Mukai, Bondal–Orlov and Bridgeland! Thus, ΦOZ is fully faithful provided we
establish that an object Q satisfying (5.4) exists. In passing we note that triviality
of ωCn as a G-equivariant sheaf implies that ΦOZ commutes with the Serre functors,
so ΦOZ is an equivalence!
5.6. We conclude the proof (given our outrageous assumptions) by constructing Q.
As with the derived equivalences arising from a tilting sheaf from Lecture 2, we
compose Φ := ΦOZ with its left-adjoint Ψ to obtain the composite functor
L
Ψ ◦ Φ (−) = R(π2 )∗ Q ⊗ π1∗ (−) ,
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
27
where π1 , π2 : Y × Y → Y are the first and second projections and where Q ∈
D b (coh(Y × Y )) is obtained by composition of correspondences (and can be computed explicitly using the formula of Mukai presented in Căldăraru [8, Proposition 5.1]). Observe that for the closed embedding ιy : {y} × Y ֒→ Y × Y , we have
G -Exti (OZ , OZ ′ ) ∼
(Φ(Oy ), Φ(Oy′ )[i])
= Hom b
S
y
y
D (mod(S∗G))
∼
= HomDb (coh(Y )) (Ψ(Φ(Oy )), Oy′ [i])
by adjunction
.∼
= HomDb (coh(Y )) (Lι∗y (Q), Oy′ [i])
∼
= HomDb (coh(Y ×Y )) Q, ιy,∗ (Oy′ )[i]
by adjunction
∼
= HomDb (coh(Y ×Y )) (Q, O(y,y′ ) [i])
Therefore, Q := Q is precisely the object that we sought to encode the G -Extvanishing from (5.4). This concludes the proof given our outrageous assumptions.
5.7. The assumptions imposed to prove the theorem do not hold in general (or
indeed, at all!): the scheme G -Hilb is neither smooth nor irreducible in general; the
map τ need not be crepant even if G -Hilb is smooth; the scheme G -Hilb is never
projective. We consider these problems one-by-one:
(1) Bridgeland, King and Reid avoid the reducibility issue by restricting to the
irreducible component Y ⊆ G -Hilb that contains the free G-orbit. The
Hilbert–Chow morphism τ : G -Hilb → Cn /G that sends a G-cluster to
its supporting G-orbit restricts to give a projective birational morphism
τ : Y −→ X which fits into the commutative diagram given earlier.
(2) the assumption that G -Hilb is smooth crucial to the method described
above, since it ensures that the skyscraper sheaves {Oy : y ∈ Y } form a spanning class in D b (coh(Y )). To avoid this issue, [6] cites the Mukai, Bondal–
Orlov and Bridgeland result only after having established that G -Hilb is
smooth. The trick is to establish smoothness by invoking an additional consequence of the intersection theorem. Indeed, after showing that the object
Q ∈ D b (coh(Y ×Y )) is supported on the diagonal ∆, the object ΨΦ(Oy ) can
be shown to satisfy H 0 (ΨΦ(Oy )) = Oy for all y ∈ Y . The G -Ext-vanishing
from above gives
Homi (ΨΦ(Oy ), Oy′ ) = 0 unless y = y ′ and 0 ≤ i ≤ n.
The intersection theorem then implies that Y is smooth at y.
(3) the crepant condition is proven after establishing the derived equivalence.
Indeed, triviality of the Serre functor on D b (mod(S ∗ G)) is carried across
the equivalence to establish that the Serre functor on D b (coh(Y )) is trivial.
This is certainly not immediate and requires a tricky local argument.
(4) As for the lack of projectivity, an equivariant version of Grothendieck duality is invoked by replacing D b (coh(Y )) by the full subcategory D0b (coh(Y ))
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
28
consisting of objects supported on the subscheme τ −1 (π(0)). The image under ΦOZ of this subcategory then lies in the full subcategory D0b (mod(S ∗G))
consisting of complexes of finitely generated nilpotent S ∗ G-modules, giving
a functor
ΦOZ : D0b (coh(Y )) −→ D0b (mod(S ∗ G)).
This trick has become standard when working with the derived category of
a resolution of an orbifold singularity.
6. Lecture 6: Wall crossing phenomena for moduli of
G-constellations
In this lecture we find that the result of Bridgeland, King and Reid holds for a
larger class of fine moduli spaces than simply the G-Hilbert scheme.
6.1. Let G ⊂ SL(n, C) be a finite subgroup. The G-Hilbert scheme parametrises
G-clusters, each of which may be regarded as a G-equivariant quotient S-modules
S/I for which the C[G]-module structure on S/I is isomorphic to the regular representation of G. We now generalise this notion.
A G-constellation is an S ∗ G-module that is isomorphic as a C[G]-module to
the regular representation of G. Recall that the Grothendieck group of the abelian
L
category of S ∗ G-modules is the free abelian group K(mod(S ∗ G)) ∼
= ρ∈Irr(G) Zρ.
P
Let R = ρ dim(ρ)ρ denote the regular representation and consider a parameter
θ ∈ Hom(K(mod(S ∗ G)), Q) satisfying θ(R) = 0. A G-constellation M is said to be
θ-stable if θ(M ) = 0 and if for every proper, nonzero S ∗ G-submodule M ′ ⊂ M we
have θ(M ′ ) > 0. The notion of θ-semistability is obtained by replacing > with ≥.
One can recover the set of G-clusters from the set of all G-constellations as follows.
L
Lemma 6.1. Consider θ+ :
ρ∈Irr(G) Zρ → Q satisfying θ+ (R) = 0, with θ+ (ρ) > 0
for all ρ 6= ρ0 . Every θ+ -stable G-constellation is a G-cluster, and conversely.
Proof. The stability condition θ+ ensures that no proper S ∗ G-submodule of a θ+ stable G-constellation contains the trivial representation. The result follows since
a G-constellation M is a G-cluster if and only if M is cyclic as an S-module with
generator ρ0 ∈ R ∼
= M.
The G-Hilbert scheme may therefore be regarded as the fine moduli space of
θ+ -stable G-constellations. In fact, most parameters in the vector space
Θ :=
L
Hom( ρ∈Irr(G) Zρ, Q) : θ(R) = 0
define a fine moduli space of θ-stable G-constellations. To justify this claim we turn
to quiver representations.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
29
6.2. Moduli construction. We assume that G ⊂ SL(n, C) be a finite abelian
subgroup of order r := |G| for simplicity, so that the bound McKay quiver (Q, R)
is easy to write down. Recall that the bound McKay quiver of the subgroup G ⊂
SL(n, C) has vertex set Q0 = Irr(G) and arrow set Q1 consists of nr arrows.
Given the equivalence of abelian categories established in Proposition 4.4, every
finitely-generated S ∗G-module corresponds to a representation of the bound McKay
quiver and, moreover, the condition that the module is isomorphic as a C[G]-module
to the regular representation translates into the condition that the corresponding
quiver representation W = {Wi }i∈Q0 , {wa }a∈Q1 satisfies dimk (Wi ) = 1 for i ∈ Q0 .
After choosing bases on each Wi for i ∈ Q0 , the representation space is
M
ρ
∼
Homk (Wtl(a) , Whd(a) )
Anr
k = Spec k[zi : 1 ≤ i ≤ n, ρ ∈ Irr(G)] =
a∈Q1
Since we are interested only in representations of the bound quiver (Q, R), we work
nr defined by the ideal
not with Anr
k , but with the subscheme Z ⊂ A
ρρ
I = zjρρi ziρ − zi j zjρ : ρ ∈ Irr(G), 1 ≤ i, j ≤ n .
This restriction is equivalent to considering only representations of the bound quiver
∗
Q
(Q, R). The algebraic torus TQ :=
i∈Q0 GL(1) /C of dimesion r − 1 acts faith-
fully on the subscheme Z ⊂ Anr
k by change of basis, and TQ -orbits correspond to
isomorphism classes of representations of the quiver Q. To form an orbit space
with nice properties we turn to Geometric Invariant Theory (GIT), and to do this
we must choose a character of the group TQ that acts. The key link that relates
the GIT quotient construction with the discussion of G-constellations from above
is that group of characters of TQ is
P
L
TQ∗ = θ ∈ ZQ0 : i∈Q0 θi = 0 ∼
= Hom( ρ∈Irr(G) Zρ, Z) : θ(R) = 0
hence TQ ⊗Z Q = Θ (!). Applying the main result of King [19] to this situation
shows that a point of Z is θ-(semi)stable in the sense of GIT if and only if it the
corresponding G-constellation is θ-(semi)stable in the sense defined above, and we
write
Mθ (Q, R) := Zθss /TQ and Mθ (Q, R) := Zθs /TQ
for the categorical quotient and geometric quotient of the open subschemes of Z
parametrising θ-semistable G-constellations and θ-stable G-constellations respectively. A parameter θ ∈ Θ is generic if every point of Z that is θ-semistable
is in fact θ-stable, in which case Mθ (Q, R) = Mθ (Q, R). The subset of generic
parameters decomposes into finitely many open cones separated by walls, where
Mθ (Q, R) remains unchanged as θ varies in a chamber (though its polarising line
bundle varies).
Definition 6.2. For any generic parameter θ ∈ Θ, the scheme Mθ (Q, R) is the
fine moduli space of θ-stable G-constellations. In addition, the moduli space comes
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
30
armed with a universal bundle Uθ on the product Mθ (Q, R) × Cn whose fibre over
any point of Mθ (Q, R) is the corresponding G-equivariant coherent sheaf on Cn .
The push-forward via the first projection gives the tautological bundle Rθ that
decomposes as the regular representation
M
Rθ =
(Rθ )ρ
ρ∈Irr(G)
giving the tautological line bundles Rρ := (Rθ )ρ on the moduli space Mθ (Q, R).
Without loss of generality, we normalise so that Rρ0 for the trivial representation
ρ0 is the trivial bundle on Mθ (Q, R).
6.3. Physics interpretation. The moduli spaces Mθ (Q, R) appear in the physics
literature as moduli of D0-branes on the orbifold Cn /G, where θ is a Fayet-Iliopoulos
term for U(1) gauge multiplets present in the world-volume theory (see Douglas–
Greene–Morrison [14]). In this case, the ideal of relations I arises from the F -terms
obtained from the partial derivatives of the superpotential of the quiver gauge theory, while the action of TQ on Z arises from the D-term (which is often described in
the physics literature via a moment map). The link between the physics and mathematics literature is madetransparent in the construction of the coherent component
by Craw–Maclagan–Thomas [12]).
6.4. As an example, consider the cyclic group G ∼
= Z/3 ⊂ SL(3, C) acting with
weights (1, 1, 1), the McKay quiver has three vertices Q0 = {ρ0 , ρ1 , ρ2 }, with three
arrows ρi+1 → ρi for i = 0, 1, 2 (where addition is modulo 3). The space
Θ = {(θ0 , θ1 , θ2 ) ∈ Q3 : θ0 + θ1 + θ2 = 0} ∼
= Q2
decomposes into three GIT chambers given by
C0 = {θ ∈ Θ : θ2 > 0, θ1 + θ2 > 0},
C1 = {θ ∈ Θ : θ1 < 0, θ1 + θ2 < 0},
C2 = {θ ∈ Θ : θ1 > 0, θ2 < 0}.
Since C0 contains parameters of the form {θ+ = (θ0 , θ1 , θ2 ) ∈ Q3 : θ1 > 0, θ2 > 0},
we deduce from above that Mθ (Q, R) = G -Hilb for all θ ∈ C0 . It is easy to show
that G -Hilb is a smooth toric variety that can be obtained as the unique crepant
resolution τ : Y → C3 /G contracting a divisor E ∼
= P2 to the singular point. This
resolution is isomorphic to the total space of the bundle OP2 (−3).
In fact, the moduli space Mθ is isomorphic to Y for any generic θ ∈ Θ; nevertheless, the moduli spaces are different for parameters lying in different chambers since
the rank 3 tautological bundle Rθ on Mθ changes as θ varies between the chambers. To emphasise this point we list in Table 2 the restriction of the tautological
bundles to the exceptional divisor E ⊂ Mθ for parameters in all three chambers.
For example, parameters θ ∈ C0 such that Mθ = G -Hilb give Rρ1 |E ∼
= OE (1) since
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
31
θ ∈ C0 θ ∈ C1
θ ∈ C2
Rρ0 |E
OE
OE
OE
Rρ1 |E OE (1) OE (−2) OE (1)
Rρ2 |E OE (2) OE (−1) OE (−1)
Table 2. Tautological bundles on Mθ (Q, R) for Z/3 ⊂ SL(3, C)
Rρ1 has degree one on the class of a line in E, and Rρ2 |E ∼
= OE (2) follows since
Rρ2 = Rρ1 ⊗ Rρ1 .
Exercise 6.3. Repeat this above example for the A2 singularity. Do you recognise
the GIT chamber decomposition? [Hint: you’re working with the A2 singularity!]
6.5. The McKay correspondence via Fourier–Mukai transform. Assume
that θ ∈ Θ is generic, so that Mθ (Q, R) is the fine moduli space of θ-stable Gconstellations. There is a projective morphism
τ : Mθ (Q, R) → Cn /G
sending any point of Mθ (Q, R) to the G-orbit that supports the corresponding Gconstellation3 . As before, there is an irreducible component of the moduli space
containing the G-constellations arising from the structure sheaves of the free Gorbits; this is the coherent component. Write π : Cn → X = Cn /G for the quotient
morphism and set Y := Mθ (Q, R). There is a commutative diagram
Y × Cn
(6.1)
πY
πV
Cn
Y
τ
π
X
where πY and πV are the projections to the first and second factors, and where G
acts trivially on both Y and X. The fine moduli construction gives the universal
sheaf U := Uθ on the product Y ×Cn , and we define a functor ΦU : D b (coh(Y )) −→
D b (mod(S ∗ G)) via
(6.2)
L
Φ(−) := ΦU (−) = R(πV )∗ U ⊗ (πY )∗ (− ⊗ ρ0 ) .
The method of Bridgeland, King and Reid [6] generalises from the fine moduli space
of G-clusters to the fine moduli space of θ-stable G-constellations for any generic
parameter θ ∈ Θ as follows:
Theorem 6.4. Let G ⊂ SL(n, C) be a finite subgroup and let θ ∈ Θ be generic. If
the coherent component Y ⊆ Mθ (Q, R) satisfies dim Y ×X Y ≤ n + 1, then:
3The orbifold Cn /G is isomorphic to an irreducible component of the scheme M (Q, R) of
0
0-semistable G-constellations
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
32
(1) the morphism τ : Y → X is a crepant resolution; and
(2) the functor ΦU with kernel the universal bundle for Mθ (Q, R) is an equivalence of derived categories that sends Rρ∨ to the G-equivariant coherent sheaf
OCn ⊗ ρ for all ρ ∈ Irr(G).
Proof. In the course of the proof that was sketched in lecture 5, we used the morphism τ : G -Hilb → X, the universal G-equivariant coherent sheaf on Cn , and the
fact that
C if I = I ′ ;
′
G -HomS (S/I, S/I ) =
0 otherwise
for any two G-clusters S/I, S/I ′ . The analogous map and sheaf have been constructed, and the G -Hom result holds for any pair of θ-stable G-constellations,
since θ-stable G-constellations are simple objects in the full category of θ-semistable
S ∗ G-modules.
It remains to show that Φ(Rρ∨ ) = OCn ⊗ ρ for all ρ ∈ Irr(G). As before, the
quasi-inverse of Φ is its the left adjoint, namely, Ψ : D(mod(S ∗ G)) → D b (coh(Y )
given by
G
L
Ψ(−) = R(πY )∗ (U ∨ [n] ⊗ (πV∗ (−)) ,
where U ∨ = RHomOY ×C3 (U , OY ×C3 ). We have
G
R(πY )∗ (U ∨ [n] ⊗ (OY ×Cn ⊗ ρ))
G
= R(πY )∗ (RHom(U , OY ×Cn [n])) ⊗ ρ)
G
= RHom(R(πY )∗ (U ), OY ) ⊗ ρ
G
= RHom(R, OY ) ⊗ ρ
Ψ(OCn ⊗ ρ) =
= Rρ∨ ,
where the key step from line two to three invokes Grothendieck duality. Thus
Φ(Rρ∨ ) = OCn ⊗ ρ.
The restriction of ΦUθ to the full subcategory of D b (coh(Y )) consisting of objects
whose cohomology sheaves are supported on the subscheme τ −1 (π(0)) is a derived
equivalence
b
b
θ
ΦU
0 : D0 (coh(Y )) −→ D0 (mod(S ∗ G))
with image the full subcategory D0b (mod(S ∗ G)) ⊂ D b (mod(S ∗ G)) consisting
of objects with nilpotent cohomology modules (or equivalently, whose cohomology
sheaves are supported at the origin in Cn ). There is a commutatve square consisting
offunctors between these derived categories, and this in turn induces a commutative
square of maps between the Grothendieck groups of these categories.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
33
θ
∼
Example 6.5. To illustrate the functor ΦU
0 , consider the group G = Z/3 ⊂
SL(3, C) from the previous example. It is enough to calculate the images under
Ψθ := (ΦUθ )−1 of the objects O0 ⊗ ρi that generate D0b (mod(S ∗ G)). The results
are presented in Table 3, where we write E := τθ−1 (π(0)) ∼
= P2 for the exceptional
divisor of the crepant resolution τθ : Mθ → C3 /G. These results may be simplified
θ ∈ C0
θ ∈ C1
θ ∈ C2
Ψθ (ρ0 ⊗ O0 ) OE (−3)[2]
Ω2E (3)
Ω1E [1]
1
Ψθ (ρ1 ⊗ O0 ) ΩE (−1)[1] OE (−1)[2] OE (−1)
Ψθ (ρ2 ⊗ O0 )
Ω2E (1)
Ω1E (1)[1] Ω2E (1)[2]
Table 3. Fourier–Mukai transforms on Mθ (Q, R) for Z/3 ⊂ SL(3, C)
via the isomorphism Ω2E ∼
= OE (−3), but the pattern in each column is clearer in the
present form. The three entries in any one of these columns generated the derived
category D0b (coh(Mθ (Q, R))) for the appropriate θ ∈ Θ. The autoequivalences of
D0b (coh(Mθ (Q, R))) are induced by moving from one chamber to another.
To illustrate the method we present two calculations in full. To perform the
calculations in the example below, we repeatedly use the formula
M
H i (− ⊗ Rρ ) ⊗ ρ,
(6.3)
π∗ Φiθ (−) ∼
= Ri τ∗ (− ⊗ Rρ ) =
ρ∈Irr(G)
where Rρ denote the tautological bundles on Mθ (we often omit π∗ from the left
hand side). To begin, fix θ ∈ C0 , hence Mθ = G -Hilb. Using (6.3) and the first
column of Table 2 we calculate
Φiθ (OE (−3)) = H i (OE (−3)) ⊗ ρ0 ⊕ H i (OE (−2)) ⊗ ρ1 ⊕ H i (OE (−1)) ⊗ ρ2 .
Since E ∼
= P2 , the only nonzero vector space in this expansion is H 2 (OE (−3)) ∼
= C.
2
2
Therefore Φθ (OE (−3)[2]) = Φ (OE (−3)) = H (OE (−3)) ⊗ ρ0 ∼
= C ⊗ ρ0 . This can
θ
be written as Φθ (OE (−3)[2]) = O0 ⊗ ρ0 or, equivalently using the inverse transform
Ψθ , as
Ψθ (O0 ⊗ ρ0 ) = OE (−3)[2].
Similarly, fix θ ′ ∈ C1 and use (6.3) with column two of Table 2 to give
Φiθ′ (Ω1E (1)) = H i (Ω1E (1)) ⊗ ρ0 ⊕ H i (Ω1E (−1)) ⊗ ρ1 ⊕ H i (Ω1E ) ⊗ ρ2 .
Here, only H 1 (Ω1E ) ∼
= C ⊗ ρ2 .
= C is nonzero, hence Φ0θ′ (Ω1E (1)[1]) = Φ1θ′ (Ω1E (1)) ∼
Write this as Φθ′ (Ω1E (1)[1]) = O0 ⊗ ρ2 or, equivalently, as
Ψθ′ (O0 ⊗ ρ2 ) = Ω1E (1)[1].
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
34
7. Lecture 7: The derived McKay correspondence beyond G -Hilb
7.1. The Derived McKay Correspondence Conjecture as formulated by Reid proposes that for a finite subgroup G ⊂ SL(n, C), the bounded derived category of
coherent sheaves of every crepant resolution Y of Cn /G should be equivalent to
the bounded derived category of finitely generated modules over the skew group
algebra. Theorem 4.6 establishes the n = 2 case, and Theorem 5.1 establishes the
case n = 3 if the distinguished crepant resolution Y = G -Hilb is chosen. What if
C3 /G admits more than one crepant resolution? In fact this question was posed
independently by Nakajima, Reid and Douglas in the following form4:
Question 7.1. Let G ⊂ SL(3, C) be a finite subgroup, and let τ : Y → C3 /G be
a (projective) crepant resolution. Does there exist a generic parameter θ ∈ Θ such
that Y ∼
= Mθ (Q, R)?
If the question has an affirmative answer then Theorem 6.4 immediately establishes a derived equivalence ΦUθ : D b (coh(Y )) −→ D b (mod(S ∗ G)). Moreover, if
Y, Y ′ are two such resolutions that satisfy Y ∼
= Mθ′ (Q, R) for
= Mθ (Q, R) and Y ′ ∼
′
generic θ, θ ∈ Θ, then the composition
(ΦUθ′ )−1 ◦ ΦUθ : D b (coh(Y )) −→ D b (coh(Y ′ ))
shows that different crepant resolutions have equivalent derived categories.
7.2. In the abelian case we can say the following:
Theorem 7.2 (Craw–Ishii [11]). Let G ⊂ SL(n, C) be a finite abelian subgroup
with n ≤ 3. For every projective crepant resolution τ : Y → Cn /G we have Y =
Mθ (Q, R) for some generic θ ∈ Θ. Thus, the Derived McKay correspondence holds
in this case.
Remark 7.3. Inevitably, Tom Bridgeland [5] beat us to the punch with his stunning
construction of a derived equivalence between the bounded derived categories of
coherent sheaves on any two crepant resolutions Y, Y ′ of C3 /G, This establishes the
Derived McKay Correspondence Conjecture in dimension n = 3. Principle 4.5 has
also been established as an equivalence of derived categories for finite subgroups
G ⊂ Sp(n, C) by Kaledin–Bezrukavnikov [3] and for finite abelian subgroups G ⊂
SL(n, C) by Kawamata [18].
Before sketching the proof of the above result we emphasise the importance of
the ample bundle on Mθ (Q, R) inherited from the GIT construction for generic
θ ∈ Θ. Let Rρ for ρ ∈ Irr(G) denote the tautological bundles on the fine moduli
space Mθ (Q, R), and let C ⊂ Θ denote the open GIT chamber containing θ. It
4OK, so Mike didn’t put it quite this way. He asked whether every ‘geometric phase’ could be
realised in open string theory.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
35
follows tautologically that the map
LC : Θ −→ Pic Mθ (Q, R) : θ 7→
O
θ
Rρ ρ
ρ∈Irr(G)
sends any parameter in the chamber C to an ample line bundle on Mθ (Q, R).
The Picard groups of each Mθ (Q, R) are isomorphic since any two are related by a
finite sequence of flops, so may knit these maps together, one piece for each chamber
C ⊂ Θ, to obtain a piecewise-linear map.
`
C⊂Θ LC : Θ −→ Pic Mθ (Q, R) .
Consider the target of this map. Once a line bundle moves to the edge of the
ample cone and passes through the boundary of the Kahler cone, one induces a
map on Mθ (Q, R) that is a well-understood birational transformation; it is either
a divisorial contraction, a flip, a flop, or a Mori Fibre Space, and arises naturally
from the Mori theoretic point-of-view5. The important point is this: the geometric
implications for Mθ (Q, R) as θ moves to the boundary of a given chamber in Θ are
`
tracked by how the image of θ under the piecewise-linear map LC varies.
Example 7.4. Consider what happens to the running example 13 (1, 2) in light of
the above. As the parameter θ moves continuously around the plane on, say, a
`
circle centred at the origin, the image of θ under the piecewise-linear map
LC
moves back and forth between the boundary walls of the nef cone of Y , the crepant
resolution of the A2 -singularity.
Example 7.5. Consider the action of the group G := Z/2 × Z/2 in SL(2, C), where
the three nontrivial group elements act as diagonal matrices, each having two entries
−1 and a single entry +1. The G-Hilbert scheme is one crepant resolution, but
there are three others, each of which can be obtained as a moduli space Mθ (Q, R)
by varying the parameter θ.
7.3. We now summarise the proof of Theorem 7.2. The G-Hilbert scheme is a
crepant resolution, and every crepant resolution of C3 /G is obtained from G -Hilb by
a finite sequence of flops. Moreover, G -Hilb = Mθ (Q, R) for the special parameter
θ = θ+ . Thus, it is enough to prove that if Y = Mθ (Q, R) is a given crepant
resolution for θ ∈ C for some chamber C, and if Y ′ is another crepant resolution
that is obtained from Y by the flop of a single curve, then Y ′ = Mθ′ (Q, R) for θ ′
in some other chamber C ′ .
Since Y = Mθ (Q, R) for θ ∈ C, the derived equivalence
b
b
θ
ΦC := ΦU
0 : D0 (coh(Y )) −→ D0 (mod(S ∗ G))
induces a Z-linear isomorphism
L
ϕC : K0 (Y ) −→ K0 (mod(S ∗ G)) ∼
= ρ∈Irr(G) Zρ.
5In the physics literature, one can even make sense of what happens to the corresponding gauged
linear sigma model beyond the Kahler cone giving ‘hybrid sectors’.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
36
There is a perfect pairing K(mod(S ∗ G)) × K0 (mod(S ∗ G)) → Z. Thus, when
we dualise and tensor over Q, the GIT parameter space Θ is a codimension-one
subspace of the space that is dual to the target of the map ϕC . This observation
enables us to provide a geometric interpretation of the walls of any given chamber:
Proposition 7.6. Let C ⊂ Θ be a chamber. Then θ ∈ C if and only if
• for every exceptional (e.g., flopping) curve ℓ in Y we have θ(ϕC (Oℓ )) > 0.
• for every compact reduced divisor D in Y and ρ ∈ Irr(G) we have
θ(ϕC (Rρ−1 ⊗ ωD )) < 0
θ(ϕC (Rρ−1 |D )) > 0.
and
The inequalities of the form θ(ϕC (Oℓ )) > 0 are ‘good’ in the sense that they
lift via the map LC from inequalities defining the walls of the ample cone of Y
in Pic(Y ). The latter ones, however, are problematic a priori since they are not
present in Pic(Y ). So, what happens to the variety (and it’s derived category!) as
θ passes through a wall of the latter kind?
∼ OY since Y → C3 /G is crepant. An object E ∈ D b (coh(Y ))
7.4. Recall that ωY =
0
is said to be spherical if HomDb (coh(Y )) (E, E[k]) = 0 unless k is 0 or n, in which
case it is C. Notice then that the self-Hom groups of a spherical object coincide
precisely with the homology groups of a sphere, hence the name. The twist along a
spherical object E is defined via the distinguished triangle
L
ev
RHomOY (E, F ) ⊗C E −→ F −→ TE (F )
for any F ∈ D(Y ), where ev is the evaluation morphism.
The twist functor
TE : D b (coh(Y )) −→ D b (coh(Y )) is an exact autoequivalence.
Lemma 7.7. When a parameter θ passes through a wall of the latter type (called a
wall of type 0), then Mθ (Q, R) is isomorphic to Mθ′ (Q, R), and the composition
b
b
Φ−1
C ′ ◦ ΦC : D (coh(Mθ (Q, R))) −→ D (coh(Mθ ′ (Q, R)))
is a twist functor (up to tensoring by a line bundle)
If C does not have the appropriate wall that defines the desired flop, we pass into
an adjacent chamber C1 separated from C by a wall of type 0. A property of twists
reveals that, roughly speaking, the images LC (C) and LC1 (C1 ) are adjacent cones
in the Picard group. We proceed in this way towards the desired wall of the ample
cone, passing through at most finitely many such type 0 walls. By crossing the final
wall we induce the desired flop Y = Mθ (Q, R) 99K Mθ′ (Q, R) = Y ′ .
7.5. Towards McKay in higher dimensions. It is natural to ask whether
new examples of the McKay correspondence can be constructed using the moduli Mθ (Q, R) in dimension n ≥ 4, when the singularity X = Cn /G may admit
crepant resolutions even though G -Hilb is singular or discrepant.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
37
One such example is the quotient of C4 by the maximal diagonal subgroup G =
(Z/2)⊕3 ⊂ SL(4, C) of exponent two. The resolution Y = G -Hilb → X has one
exceptional divisor E ∼
= P1 ×P1 ×P1 of discrepancy one. The divisor E ⊂ G -Hilb can
be blown down to P1 × P1 in three different ways, giving rise to crepant resolutions
Yi → X with exceptional loci Ei ∼
= P1 × P1 for i = 1, 2, 3. All four resolutions of X
are toric morphisms, and the 3-dimensional cross-sections of the 4-dimensional fans
defining these resolutions are shown in Figure 7.5:
34
v
14
v
v24
v23
12
v
34
14
34
34
v
v
14
v
v
14
v
v
v24
v24
24
v
c
23
v23
23
v
v
12
12
v12
v
v
34
v
14
v
v24
v23
12
v
Figure 3. Toric picture as drawn beautifully by Chiang–Roan [9, Figure 3]
We now show that each crepant resolution Yi is a moduli space Mθ (Q, ) of θ-stable
G-constellations for some generic θ ∈ Θ (these are not the only ones; there are
another 189 distinct crepant resolutions!).
The chamber containing the weights defining Mθ = G -Hilb is C0 = {θ ∈
Θ; θ(ρ) > 0 if ρ 6= ρ0 }. Let x, y, z, w denote the coordinates of C4 . These lie
in distinct eigenspaces of the G-action denoted (1, 0, 0), (0, 1, 0), (0, 0, 1), (1, 1, 1) ∈
(Z/2)⊕3 ∼
= G∗ . Write ρ1 := (0, 1, 1), ρ2 := (1, 0, 1), ρ3 := (1, 1, 0) for the complementary nontrivial irreducible representations, and write Wi := {θ ∈ Θ : θ ∈
C0 , θ(ρi ) = 0} for the corresponding wall of C0 for i = 1, 2, 3. The claim is that the
unique chamber Ci lying adjacent to C0 satisfying Wi = Ci ∩ C0 defines the crepant
resolution Yi ; in particular, we claim that Yi = Mθ for all θ ∈ Ci .
To prove the claim we follow the behaviour of the G-constellations defined by the
twelve torus-invariant points of G -Hilb as θ passes through the wall Wi . In each
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
38
case, the four G-constellations (in fact G-clusters) defining the torus-invariant points
corresponding to the outermost simplices in the fan Σ0 in Figure 7.5 (containing the
vectors e1 , e2 , e3 , e4 as vertices) remain θ-stable with respect to parameters θ ∈ Ci .
On the other hand, all of the remaining eight torus-invariant G-clusters become
unstable. In addition, for each i = 1, 2, 3 there are four new torus-invariant Gconstellations that are θ-stable for θ ∈ Ci (these are not G-clusters so were not
present on G -Hilb). An explicit deformation calculation shows that for each i =
1, 2, 3, the four new G-constellations define the four torus-invariant points of Yi
corresponding to the four innermost simplices in the fans Σi in Figure 7.5. This
shows that for each i = 1, 2, 3, the birational map G -Hilb → Mθ induced by moving
the GIT parameter through the wall Wi coincides with the contraction from G -Hilb
to the crepant resolution Yi .
Applying Theorem 6.4 carefully leads to the following result:
Theorem 7.8. For i = 1, 2, 3, there is a chamber Ci ⊂ Θ such that Yi = Mθ (Q, R)
for θ ∈ Ci . Moreover, the functor ΦUθ defined by the universal sheaf is an equivalence of categories D b (coh(Yi )) ∼
= D b (mod(S ∗ G)).
Proof. It remains to prove the second statement. Write τi : Mθi → X for the crepant
resolution with θi ∈ Ci for i = 1, 2, 3. The fibre τi−1 (π(0)) over the point π(0) ∈
C4 /G is isomorphic to P1 × P1 , so it satisfies the dimension condition required to
apply Theorem 6.4. This is not yet enough since the images under π : C4 → C4 /G of
all four coordinate axes are also singular and hence have als been resolved in creating
the resolution. Nevertheless, these singularities arise along a subvariety of dimension
one, so the dimension of the fibre product over any such point π(x) ∈ C4 /G is 2(3)1=5. This equals n + 1 in this case, so Theorem 6.4 applies and the equivalence of
categories follows.
This is the first known example in dimension n ≥ 4 of a nonsymplectic group action for which G -Hilb is not a crepant resolution and yet the McKay correspondence
has been established as an equivalence of derived categories. It would be interesting
to discover the extent to which crepant resolutions of Cn /G can be constructed as
moduli Mθ (Q, R) in general. The challenge is then to show that the integral functor
ΦUθ is a Fourier–Mukai transform.
References
[1] D. Baer. Tilting sheaves in representation theory of algebras. Manuscripta Math., 60(3):323–
347, 1988.
[2] A. Beı̆linson. Coherent sheaves on Pn and problems in linear algebra. Funktsional. Anal. i
Prilozhen., 12(3):68–69, 1978.
[3] R. V. Bezrukavnikov and D. B. Kaledin. McKay equivalence for symplectic resolutions of quotient singularities. Tr. Mat. Inst. Steklova, 246(Algebr. Geom. Metody, Svyazi i Prilozh.):20–
42, 2004.
EXPLICIT METHODS FOR DERIVED CATEGORIES OF SHEAVES
39
[4] A. Bondal. Helices, representations of quivers and Koszul algebras. In Helices and vector
bundles, volume 148 of London Math. Soc. Lecture Note Ser., pages 75–95. Cambridge Univ.
Press, Cambridge, 1990.
[5] T. Bridgeland. Flops and derived categories. Inventionnes Mathematicae, 2002.
[6] T. Bridgeland, A. King, and M. Reid. The McKay correspondence as an equivalence of derived
categories. J. Amer. Math. Soc., 14(3):535–554 (electronic), 2001.
[7] T. Bridgeland and A. Maciocia. Fourier-Mukai transforms for K3 and elliptic fibrations. J.
Algebraic Geom., 11(4):629–657, 2002.
[8] A. Căldăraru. Derived categories of sheaves: a skimming. In Snowbird lectures in algebraic
geometry, volume 388 of Contemp. Math., pages 43–75. AMS, Providence, RI, 2005.
[9] L. Chiang and S.S. Roan. Crepant resolutions of cn /a1 (n) and flops of n-folds for n = 4, 5.
In ”Calabi-Yau varieties and mirror symmetry”, eds. N. Yui and J. D. Lewis, Fields Institute
Comm. 38, Amer. Math. Soc., pages 27–41, 2003.
[10] D. Cox. The homogeneous coordinate ring of a toric variety. J. Algebraic Geom., 4(1):17–50,
(1995).
[11] A. Craw and A. Ishii. Flops of G-Hilb and equivalences of derived categories by variation of
GIT quotient. Duke Math. J., 124(2):259–307, 2004.
[12] A. Craw, D. Maclagan, and R.R. Thomas. Moduli of McKay quiver representations I: the
coherent component. Proc. London Math. Soc., 95(2):179–198, 2007.
[13] A. Craw and G.G. Smith. Projective toric varieties as fine moduli spaces of quiver representations, (2007). To appear in Amer. J. Math., math.AG/0608183.
[14] M. Douglas, B. Greene, and D. Morrison. Orbifold resolution by D-branes. Nuclear Phys. B
506, pages 84–106, (1997).
[15] G. Gonzalez-Sprinberg and J.-L. Verdier. Construction géométrique de la correspondance de
McKay. Ann. Sci. École Norm. Sup. (4), 16(3):409–449 (1984), 1983.
[16] Y. Ito and I. Nakamura. Hilbert schemes and simple singularities. In New trends in algebraic
geometry (Warwick, 1996), volume 264 of London Math. Soc. Lecture Note Ser., pages 151–
233. Cambridge Univ. Press, Cambridge, 1999.
[17] M. Kapranov and E. Vasserot. Kleinian singularities, derived categories and Hall algebras.
Math. Ann., 316:565–576, 2000.
[18] Y. Kawamata. Log crepant birational maps and derived categories. J. Math. Sci. Univ. Tokyo,
12(2):211–231, 2005.
[19] A. King. Moduli of representations of finite-dimensional algebras. Quart. J. Math. Oxford
Ser. (2), 45(180):515–530, 1994.
[20] A. King. Tilting bundles on some rational surfaces. Unpublished article available from
http://www.maths.bath.ac.uk/ ∼masadk/papers/, (1997).
[21] J. McKay. Graphs, singularities, and finite groups. In The Santa Cruz Conference on Finite
Groups (Univ. California, Santa Cruz, Calif., 1979), volume 37 of Proc. Sympos. Pure Math.,
pages 183–186. Amer. Math. Soc., Providence, R.I., 1980.
[22] M. Reid. McKay correspondence. In Proc. of algebraic geometry symposium (Kinosaki, Nov
1996), T. Katsura (ed.), pages 14–41, (1997).
[23] M. Reid. La correspondance de McKay. Séminaire Bourbaki, 52ème année, no. 867, Novembre
1999, to appear in Astérisque 2000, (1999).
Department of Mathematics,Glasgow University, Glasgow G12 8QW, Scotland
E-mail address: craw@maths.gla.ac.uk