Object-Oriented Specification and Open Distributed Systems Einar Broch Johnsen and Olaf Owe
advertisement

Object-Oriented Specification and
Open Distributed Systems
Einar Broch Johnsen1,2 and Olaf Owe2
2
1
BISS, FB3, University of Bremen, Germany
Dept. of Informatics, University of Oslo, Norway
{einarj,olaf}@ifi.uio.no
Abstract An object-oriented approach to program specification and
verification was developed by Ole-Johan Dahl with the long-term Abel
project. Essential here was the idea of reasoning about an object in terms
of its observable behavior, where the specification of an object’s present
behavior is given by means of its past interactions with the environment.
In this paper, we review some of the ideas behind this approach and
show how they can be fruitfully extended for reasoning about black-box
components in open object-oriented distributed systems.
1
Introduction
Object-orientation was introduced by Ole-Johan Dahl and Kristen Nygaard with
the programming language Simula [13–15,41] in 1966. Since then, object-oriented
programming (OOP) has become an increasingly widespread and popular programming paradigm, lately with Java. Also for system specification, many formalisms have adapted ideas from OOP to better organize specifications; for example, Actors [2], Maude [9], Object-Z [46], UML [7], and the π-calculus [38] all
support some object-oriented concepts. The term object-based has emerged to
describe formalisms that support objects, i.e., that incorporate notions of object
identity and encapsulation in the language [40]. To be fully object-oriented, a
formalism should also have an inheritance mechanism reminiscent of OOP. We
will now explain what we mean by the central object-oriented concepts of object
identity, encapsulation, and inheritance in the context of specification notations:
– Identity. Objects have explicit identifiers. When communication occurs between named objects, an object knows which objects it addresses with a given
communication. Object identifiers can be transmitted from one object to
another during such communication. An object’s awareness of other objects
in its environment can thus increase over time.
– Encapsulation and information hiding. An object encapsulates its internal
variables (attributes), so these are not directly perceived from outside the
object. This has some noteworthy consequences. Internally, we gain control
of how the object’s variables are manipulated. Variables can only be manipulated by operations (methods) that the object offers to its environment,
so the state space of an object resembles an abstract data type. Externally,
an object appears as a black box that reacts in a (more or less) predictable
manner to impulses from its environment. To use an object, knowledge of
its implementation is not needed, only of the available methods. (Explicit
hiding mechanisms were not present in the first version of Simula.)
– Inheritance. A subclass inherits a superclass by adding attributes and modifying or extending its methods. Class inheritance, introduced in Simula, is
a powerful structuring mechanism for developing large systems. However, to
really be of value, inheritance should not only allow reuse of code, but also
of the reasoning done for the superclass [48]. A similar notion of inheritance
or reuse at the level of reasoning can be found in behavioral (or predicate)
subtyping [35]. In principle, these two notions of inheritance are not directly
related, but when class inheritance is restricted to behavioral subtyping, we
get substitutability, by which we mean that an object of a class C can be
replaced by an object of a subclass of C at the level of reasoning.1
Restricting class inheritance to ensure behavioral subtyping comes at the
expense of free code reuse and may seem too limiting in the eyes of many programmers. Also, combining these notions lead to the so-called inheritance anomalies [37]. In contrast, in the Abel project [10–12, 16], Dahl takes the approach
that reasoning is done at the specification level, and code is shown to implement specifications, for instance by means of type simulation. Hence, in Abel, a
class can simulate a type. Requirement specification of a concurrent object is in
terms of its observable behavior and may be implemented using (internal) state
transitions. The observable behavior of an object up to some point in time is recorded in its communication history (or finite trace), which gives us an abstract
view of the object’s state, and present behavior can be specified as a function on
the history. Traces are well-known from process algebra, for example CSP [25].
However, generator inductive specifications of the permissible traces as suggested by Dahl [10], where fix-points are not needed in the underlying semantics,
are different from the process algebraic approach (as explained in Section 2.2). In
contrast to approaches based on streams [8, 33], specifications can be expressed
by finite traces since the history at any given time is finite.
In this paper, our focus is on formal reasoning and specification of open distributed systems (ODS). These systems are subject to change at runtime, so we
consider concurrent objects, and more generally components, that exist in an
evolving environment. For instance, new objects can be introduced into the system and old objects can be upgraded or replaced. Objects will often be supplied
by third party manufacturers and we cannot generally expect to have knowledge
of implementation details concerning objects in the environment. Instead, the
behavior of an object can be locally determined by its interaction with other
objects in the environment [2], i.e. by its observable behavior. Due to the complexity of ODS, it is often advocated that system descriptions be aspectwise, in
so-called viewpoints [26]. In this paper, we address the issue of specifying ODS
1
An early work on substitutability in the setting of class invariants, pre- and postconditions on methods, and related requirements on method redefinition and external
attribute access, is the thesis of Wang [50], supervised by Dahl.
by viewpoints of observable object behavior, based on the tradition in objectoriented specification from Abel.
The paper is structured as follows. In the next section, we give a brief overview of some important principles of object-oriented specification in Abel and
suggest extensions towards ODS. Section 3 considers openness within the objectoriented framework. Section 4 introduces object viewpoints and behavioral interfaces in an assumption guarantee specification style [32], inspired by these
principles. Section 5 illustrates the use of this formalism by a specification of
a software bus, i.e. an open communication infrastructure. Section 6 discusses
composition of assumption guarantee specifications in this setting and Section 7
relates this work to other formalisms for specifying ODS and outlines future
research issues before we conclude in Section 8.
2
Object-Oriented Specification
The Abstraction Building, Experimental Language (Abel) is a long-term research project at the University of Oslo, centered around a student course in
formal methods and the development of a theorem prover. Abel is a wide spectrum language, expressing requirement specifications, constructive specifications
(models), and classes. The most important sources of ideas for Abel are objectorientation, especially the notions of class and subclass, which originated from
the work on Simula; generator induction, from the work on Larch [23]; and
order-sorted algebras, from the work on OBJ [22]. Program development in Abel
consists of three steps:
– Applicative level. Specification in terms of observable behavior uses abstract
data types, generator induction, and the local communication history. Subtypes are either syntactical (cf. examples) or predicative. Abel supports
partial functions with partial logic [42].
– Imperative level. Class implementation is state-based, establishing invariants
by means of Hoare logic [12, 24], with the history as a mythical variable.
– Integration. The two levels are integrated by means of weak or strong simulation. A type can be simulated by a class.
We will now consider each of the three steps and develop a brief example.
2.1
The Applicative Level of Abel
At an applicative level, specifications of concurrent objects are expressed by
permissible observable behavior, i.e. by the time sequence of input and output to
the program. This fits well with the object-oriented notion of encapsulation; only
visible operations are considered at the applicative level and the realization of the
object by means of internal data structures and implementation of operations
is postponed to the imperative level. An execution can be represented by a
sequence of communication events. In the case of non-terminating executions,
the sequences are infinite. However, infinite sequences are not easy to reason
about. In order to avoid infinite sequences, specifications are expressed in terms
of the finite initial segments of the executions, which express the abstract states
of the object. These sequences are commonly referred to as histories [10] or
traces [25]. An invariant on the history defines a set of traces by the prefixclosure of the set of executions, so history invariants express safety properties in
the sense of Alpern and Schneider [3].
Dahl remarks that specifications in a generator inductive style closely resemble programs in an applicative programming language [12]. The values of
an abstract data type are completely defined by its set of generator functions
(or constructors) in the sense that all inhabitants of the type can be generated
by successive applications of the constructors. The definition f (x1 , . . . , xn ) ==
RHS is terminating and generator inductive (TGI) if the right hand side RHS
of the equation uses the variables x1 , . . . , xn , the constructors, case constructs,
f itself, and other TGI defined function symbols. In case of direct or indirect
recursion, syntactic requirements guarantee termination. Specifications where all
expressions are well-defined and only use TGI defined functions, can be evaluated
in a convergent term rewrite system. Furthermore, for TGI defined functions,
inductive arguments can be used in proofs; to each constructor corresponds one
hypothesis in the proof rule. Such proofs can also to a large extent be mechanized
by term rewrite systems.
Finite sequences. We present an abstract data type specification in the Abel
style for finite sequences parameterized over some type T . The type (schema)
Seq[T ] is defined as the union of two subtypes, Eseq, which is the type of the
empty sequence over type T , and Seq1[T ], which is the type of non-empty sequences over type T .
type Seq[T ] by Eseq, Seq1[T ] ==
module
func
ε
: → Eseq
func
ˆ ` ˆ : Seq[T ] × T → Seq1[T ]
genbas
ε, ˆ ` ˆ
endmodule
where ˆ denotes argument positions of functions with mixfix notation. Here, the
keyword genbas is used to indicate the functions used as a generator basis for
the type, so the finite sequences are constructed from two generator functions;
ε generates an empty sequence and s ` x generates a non-empty sequence from
a sequence s and en element x of type T . In Abel, finite sequences are defined
by means of right append (suffix) rather than left append (prefix).
Using TGI definitions, several functions can be constructively defined on
the type of finite sequences Seq[T ]. For instance, we can define left append
ˆ a ˆ : T × Seq[T ] → Seq1[T ], concatenation ˆ `a ˆ : Seq[T ] × Seq[T ] → Seq[T ],
and length ] ˆ : Seq[T ] → Nat by (case-free) equations:
xaε=ε`x
x a (s ` y) = (x a s) ` y
s `a ε = s
s `a (t ` x) = (s `a t) ` x
]ε = 0
](s ` x) = ]s + 1
In these function definitions, the free variables in each equation have an implicit
universal quantifier, reminiscent of for instance ML, and each line corresponds
to a possible generator case.
Many useful functions are only partially defined on Seq[T ], but TGI defined
and total on the subtype Seq1[T ], which has only one generator (`). For instance,
we can define selector functions: right rest rr(ˆ) : Seq1[T ] → Seq[T ] and left term
lt(ˆ) : Seq1[T ] → T by
rr(ε ` x) = ε
rr((s ` y) ` x = rr(s ` y) ` x
lt(ε ` x) = x
lt((s ` y) ` x) = lt(s ` y)
The type of finite sequences and the functions we have defined above will now
be used in an example specification.
Example 1. We illustrate the applicative level of the Abel language by the specification of an unbounded buffer object. The buffer receives input by means of
a get operation and transmits output by a put operation. The history of the buffer is a sequence of operation calls, conventionally denoted H, and new method
invocations are recorded in the history by suffixing. Hence, the history until
present time is always available for reasoning, and present behavior of the buffer
is specified in terms of preceding activity. If we represent by a type Calls the put
and get operations ranging over the values of a given type T , then H : Seq[Calls].
Given a history sequence, we define a function cnt that computes the implicit
content of the buffer, cnt : Seq[Calls] → Seq[T ]. Thus, the history gives us an
abstract view of the state. The invariant of the specification is defined as a predicate on the history, which is updated after every method call. It follows that
the history invariant is implicitly both pre- and postcondition of every operation
in the interface.
interface BufferSpec [T : T ype]
begin
opr put(in x : T )
opr get(out x : T )
inv I(H)
where
I(ε) = ε
I(H ` put(x)) = I(H)
I(H ` get(x)) = I(H) ∧ if cnt(H) 6= ε then x = lt(cnt(H)) else false fi
cnt(ε) = ε
cnt(H ` put(x)) = cnt(H) ` x
cnt(H ` get(x)) = rr(cnt(H))
end
Both the invariant and the auxiliary function cnt are defined by terminating generator induction. An invocation get(x) updates the mythical variable:
H := H ` get(x). As new values are added to the right of the content sequence
(calculated by cnt(H)), the first value is retrieved by the left term function
lt(cnt(H)) and the remaining content by the right rest function rr(cnt(H)).
2.2
The Imperative Level of Abel
For the implementation of specifications in program code, a state-based guarded
command language is suggested. The invocation of an operation implemented
by G −→ S, where G is a guard and S is a program statement, must wait
until G holds and results in the execution of S. The communication history
is available at the implementation level as a “mythical” variable [12], which is
implicitly updated with a new event representing the invocation of an operation
after evaluation of the operation body. For verifying operations, Abel relies on
Hoare-logic. Given a history invariant, verifying an operation call op(x) consists
of establishing the validity of the formula {G ∧ I(H)} S {I(H ` op(x))}.
Example 2. In this example, we propose a program code for the unbounded buffer specified in Example 1. The content of the buffer is stored in an internal variable cont : Seq[T ]. The program invariant is given by the relationship between
the implicit content of the buffer, as extracted from the history, and the actual
content which is stored in cont.
class BufferClass [T : T ype]
implements BufferSpec [T ]
begin
var cont : Seq[T ]
opr put(in x : T ) == cont := cont ` x
opr get(out x : T ) == cont 6= ε −→ [x := lt (cont); cont := rr (cont)]
inv cont = cnt(H)
end
The constructive nature of this form of applicative specifications is close to implementation, as illustrated by this program code for the specification of Example 1.
In fact, this class implementation can be derived directly from the specification
and the class invariant. (To obtain single transition systems, program statements can be restricted to multiple assignment operations although this is not
done here.)
In Abel, the history is constructed by sequence suffixing, using right append
as the constructor in contrast to prefixing by means of left append. The history
is always available for reasoning, as an abstract representation of the state, from
which we can extract information. Consequently, the correct behavior of the specified object can be determined by a predicate. Choosing the prefix constructor
instead would bring us to a recursive setting, similar to process algebras such
as CSP. In this case, the history is not available for reasoning and information
concerning the state must be passed along in process parameters that reveal
parts of the internal structure of the program. An illustrative example here is
the formalism CSP-OZ [20], which combines CSP with Object-Z. In this formalism, objects specified in Object-Z are represented as CSP processes by including
all attributes as process parameters. Abel specifications do not need to reveal
the internal structure of the program, so they are in this sense more abstract
than the corresponding process algebraic specifications. In particular, recursive
definition of processes and the resulting fix-point semantics are avoided.
Type simulation. In order to show that program code implements the intended
specification, Abel uses type simulation techniques [12]. An abstract type simulates a concrete type by means of an abstraction function. There are many
techniques for type simulation. In Abel, focus has been on both strong simulation, where every function, and thereby every value, on the abstract type is
simulated by a function on the concrete type, and on weak simulation, where
concrete values at best approximate an abstract value, for instance giving room
for capacity constraints at the concrete level. Type approximation corresponds
to one possible method of data refinement. There is a rich literature on data
refinement; for a recent overview, the reader may consult de Roever and Engelhardt [18]. Although less standard, Abel’s refinement by type approximation
reflects a profound concern for the practical applicability of formal methods.
2.3
Explicit Object Identities
In this section, we show how the formalism presented above can be extended
in order to capture object interaction in systems with many objects. When we
consider concurrent objects that communicate in parallel systems, an object
may talk to several other objects. In this setting it is therefore not satisfactory
to model the object’s behavior by its interaction with an implicit environment
that consists of a single entity, as we did in the previous examples. Instead,
we now consider the environment of an object as an unbounded set of other
objects. When we specify an object in such a system, we will refer to this set
as the object’s (communication) environment. For object systems, the history
records communication between objects in the form of remote method calls.
Therefore, we introduce object identifiers in the events that are recorded in the
communication traces, so that every communication event contains the identity
of the transmitting object. This lets us express properties that should hold for
a single calling object, a particular calling object, or for all calling objects by
projections on the history. Also, we can specify how calls from different objects in
the environment are interleaved. We illustrate specifications with implicit object
identities in communication events by an example, following [17].
Example 3. Consider an object controlling write access to some shared data
resource. All objects in its environment are allowed to perform write operations
on the shared data, but only one object at a time; we want to specify that write
access is sequential. Assume that every event has an implicit sender identifier.
Now, we can project traces on an object identifier to express projection on the
set of all events associated with that identifier (ranging over operations) or on
the name of an operation to express projection on the set of events associated
with that operation (ranging over object identifiers).
Let OW represent (the completion of) an open_write operation, W a write
operation, and CW a close_write operation. Let the predicate t prs Reg express
that a trace t is a prefix of a trace in the regular language Reg. The prs
predicate will be used to express invariant properties on the history. As before,
H denotes the history of communication events involving the current object. We
denote by E the current environment of the object we are specifying.
interface SeqWrite [T : T ype]
begin
opr OW
opr W
opr CW
inv H prs [OW W ∗ CW ]∗ ∧ ∀o ∈ E : (H/o) prs [OW W ∗ CW ]∗
lemma ∀H : 0 ≤ ](H/OW ) − ](H/CW ) ≤ 1
end
The regular expression ensures that write operations W are performed between
an open_write operation OW and a close_write operation CW . We want the
regular expression to hold for every object in the environment so we quantify over
object identifiers. The predicate ∀o ∈ E : (H/o) prs [OW W ∗ CW ]∗ quantifies
over objects in the environment. By projecting the history on events associated
with every calling object, we consider the (pointwize) communication between
the objects of the environment and the object of the interface. The predicate
above therefore states that every object in the environment adheres to this behavior. The other conjunct H prs [OW W ∗ CW ]∗ states that the full history
of the object adheres to this behavior as well. This means that write operations
only occur when ](H/OW )−](H/CW ) = 1, for every object in the environment,
and the lemma follows. Therefore, at most one object in the environment can
perform write operations with the given invariant.
Observe that in this example, the specified object is passive because it only
receives and never transmits calls. In order to specify objects that are active
as well, we need to reason about events that are transmitted from the object
(output) to different objects in the environment, so communication events need
to be equipped with the object identities of both the sender and receiver.
3
Object-Orientation and Openness
In open systems software may be changed, interchanged, and updated. This
makes program reasoning more difficult as old invariants can be violated by new
software, and also static typing can be too restrictive. Although there are applications where this does not seem to be a problem, it is interesting to see how and
to what extent strong typing and incremental, textual, and compositional reasoning can be combined with openness. Strong typing alone can ensure essential
safety properties, such as providing limited access rights. We will here explore
some possibilities for controlled openness within the object-oriented framework.
In order to solve the conflict between unrestricted reuse of code in subclasses,
and behavioral subtyping and incremental reasoning control, we suggest to use
behavioral interfaces as presented in the previous section to type object variables,
and consider multiple inheritance at the interface level as well as at the class
level. Interface inheritance is restricted to a form of behavioral subtyping [35],
whereas class inheritance may be used freely. Inherited class (re)declarations are
resolved by disjoint union. A class may implement several interfaces, provided
that it satisfies the syntactic and semantic requirements stated in the interfaces.
An object of class C supports an interface I if the class C implements I.
Reasoning control is ensured by substitutability at the level of interfaces: an
object supporting an interface I may be replaced by another object supporting
I or a subinterface of I. Subclassing is unrestricted with the consequence that
interface implementation claims are not preserved by subclassing. If a class C
implements an interface I, this property is not always guaranteed by a subclass
of C, as a method redefinition may violate semantic requirements of I. Therefore,
implementation claims (as well as class invariants) are not in general inherited.
Strong typing. We consider typing where two kinds of variables are declared; an
object variable by an interface and an ordinary variable by a data type. Strong
typing ensures that for each method invocation o.m(inputs; outputs), where I is
the declared interface of o, the actual object o (if not nil) will support I and the
method m will be understood, with argument types “including” the types of the
actual ones. Inclusion is defined as the pointwise extension of the subtype and
subinterface relation, using co- and contravariance for in- and out-parameters, respectively. Explicit hiding of class attributes and methods is not needed, because
typing of object variables is based on interfaces and only methods mentioned in
the interface (or its super-interfaces) are visible.
Modifiability. An obvious way to provide some openness is to allow addition of
new (sub)classes and new (sub)interfaces. In our setting, this mechanism in itself
does not violate reasoning control, in the sense that old proven results still hold.
Also, additional implementation claims may be stated and proved. However, old
objects may not use new interfaces that require new methods.
A natural way to overcome this limitation is through a dynamic class construct, allowing a class to be replaced by a subclass. Thus a class C may be modified by adding attributes (with initialization) and methods, redefining methods,
as well as extending the inheritance and implements lists. (In order to avoid
circular inheritance graphs, C may not inherit from a subclass of C.) Unlike
addition of a subclass of C, all existing objects of class C or a subclass become renewed in this case and support the new interfaces. Reasoning control is
maintained when the dynamic class construct is restricted to behavioral subtyping, which can be ensured by verification conditions associated with the class
modification [43]. Unrestricted use of the dynamic class construct, which may
sometimes be needed, has the impact that objects of class C may violate behavior specified earlier, and constraints on compositions involving objects of class
C must be reproved (or weakened).
Notice that as a special case of class modification, one may posteriorly add
super-classes to an established class hierarchy. This would be an answer to a major criticism against object-oriented design [21], namely that the class hierarchy
severely limits restructuring the system design.
The run-time implementation of dynamic class constructs is non-trivial [36],
even typing and virtual binding need special considerations:
– The removal of a method or attribute from a class C violates strong typing,
since such a method or attribute may be used in an old subclass of C and
by strong typing the method or attribute must exist. This indicates that
removal of methods or attributes should not be allowed.
– A modified class C may add an attribute or a method m and thereby an
old subclass D inherits m. The subclass may also inherit m (with the same
parameter types) from another superclass of D. An implication is that the
virtual binding mechanism must give priority to the old m, otherwise objects
of class D will behave unpredictably and reasoning control is clearly lost.
This can be implemented by a table associated with each class at run-time,
updated whenever a superclass is modified.
– The typing and well-formedness of a modification of a class C should not
depend on any existing subclass of C. Consider the case where a new method
m is added to a class C. This should be legal even if a subclass D already
has a method m. The parameter types may well be the same, and this case
predicts that we must accept unrestricted method redefinition in a subclass!
– Parameter types may be only slightly changed in class C (say, only for the
out-parameters of a method m), in which case we must tolerate arbitrary
overloading in a subclass. Invocations of m on objects of a subclass D must
respect old behavior, otherwise these objects will behave unpredictably and
reasoning control is lost. An implication is that the virtual binding mechanism must give priority to local methods (that include the actual parameter
types) over inherited ones.
These implications give independent justification for declaring interfaces for object variables, while allowing unrestricted subclassing. In the next section, we
consider specification and reasoning with behavioral interfaces more closely.
4
Viewpoints to ODS
In ODS, we can represent components by (collections of) objects that run in
parallel and communicate asynchronously by means of remote method calls with
input and output parameters. Often, such objects are supplied by third-party
manufacturers unwilling to reveal the implementation details of their design.
Therefore, reasoning about such systems must be done relying on abstract specifications of the system’s components. We find specification in terms of observable behavior particularly attractive in this setting and imagine that components
come equipped with behavioral interfaces that instruct us on how to use them.
Furthermore, as a component may be used for multiple purposes, it can come
equipped with multiple specifications. This section presents a formalism for reasoning about object viewpoints in the setting of ODS, extending the formalism
of Section 2. Further details about this work can be found in [28, 29, 43].
4.1
Semantics
We now propose a formalization of viewpoint specifications for objects communicating asynchronously by means of remote method calls, restricting ourselves
to safety aspects. Let Objects and Mtd be unbounded sets of object identifiers
and method names, respectively, and let Data be a set of data values including
Objects. Denote by List[T ] the lists over a type T (and by [ ] the empty list).
Definition 1 (Communication events). A communication event is a tuple
ho1 , o2 , m, t, inputs, outputsi such that o1 , o2 ∈ Objects, o1 6= o2 , m ∈ Mtd,
t ∈ {i, c}, inputs, outputs ∈ List[Data], and t = i ⇒ outputs = [ ].
Intuitively, we can think of these events as initiations and completions of
calls to a method m provided by an object o2 by another object o1 . Initiation
events have no output. Communication is asynchronous as other events can be
observed in between the initiation and completion of any given call. (We here
assume strong typing, so the number and types of input and output parameters
are correct by assumption in the events.)
Definition 2 (Alphabet). An alphabet for a set of objects O is a set S of communication events such that ho1 , o2 , m, c, ins, outsi ∈ S ⇒ ho1 , o2 , m, i, ins, [ ]i ∈
S and ho1 , o2 , . . .i ∈ S ⇒ (o1 ∈ O ∧ o2 6∈ O) ∨ (o2 ∈ O ∧ o1 6∈ O).
At the specification level, the alphabet of an object supporting an interface
is statically given by the interface. Denote by h/S and h \ S the restrictions of
a sequence h to elements of the set S and to the complement of S, respectively.
Definition 3 (Trace set). A trace set over an alphabet α is a prefix-closed
set of sequences t ∈ Seq[α] such that, for every sequence t in the set and every
completion event ho1 , o2 , m, c, inputs, outputsi ∈ α,
](t/ho1 , o2 , m, i, inputs, [ ]i) ≥ ](t/ho1 , o2 , m, c, inputs, outputsi.
Definition 4 (Specification). A specification Γ is a triple hO, α, T i where (1)
O is a set of object identities, O ⊆ Objects, (2) α is an infinite alphabet for O,
and (3) T is a prefix-closed subset of Seq[α].
We call O the object set of the specification Γ , α the alphabet of Γ , and
T the trace set of Γ . In shorthand, these are denoted O(Γ ), α(Γ), and T (Γ ),
respectively. For a specification Γ , we can derive a communication environment
E(Γ ) of objects communicating with the objects of Γ , from O(Γ ) and α(Γ).
In an ODS setting, we generally think of the communication environment as
unbounded. If the object set of a specification Γ is a singleton {o}, we say that
Γ is an interface specification (of o). A component specification may comprise
several objects.
In order to increase readability, we will henceforth represent an initiation
event ho1 , o2 , m, i, [i1 , . . . , in ], [ ]i visually by o1 →o2 .m(i1 , . . . , in ) and a completion event ho1 , o2 , m, i, [i1 , . . . , in ], [v1 , . . . , vp ]i by o1←o2 .m(i1 , . . . , in ; v1 , . . . , vp ).
Example 4. Consider the specification SeqWrite from Example 3, which we now
reformulate as an interface specification of an object o. Let E = {x ∈ Objects | x 6=
o} and let Data be a set of data values. The specification only considers one
object, so O(SeqWrite) = {o}. The write method W has an input parameter
ranging over Data. The alphabet of SeqWrite is now
α(SeqWrite) , {x→o.OW (), x←o.OW (), x→o.CW (), x←o.CW () | x ∈ E}
∪{x→o.W (d), x←o.W (d) | x ∈ E ∧ d ∈ Data}.
Controlled write access is obtained by restricting the possible traces of SeqWrite.
For this purpose, we use patterns, i.e. regular expressions extended with a binding operator •, and extend the prs predicate accordingly. Define a pattern
W cycle by
[[x→o.OW () x←o.OW ()
[[x→o.W (d) x←o.W (d)] • d ∈ Data]∗
x→o.CW () x←o.CW ()] • x ∈ E].
The trace set is now specified by a prefix of the pattern:
T (SeqWrite) , {h : Seq[α(SeqWrite)] | h prs W cycle∗ }.
Here, x is bound for each traversal of the loop and this binding operator on calling
objects ensures sequential write access. A caller may perform multiple write
operations once it has access. Note that a set defined by a predicate h prs R is
always prefix-closed and that T (SeqWrite) is a trace set.
Refinement. Refinement describes a correct transformation step from specifications to programs, usually by making the specification more deterministic in the
sense of model-inclusion. In our setting of partial specifications, a step towards
realization of the specification may involve considering additional communication events, suggesting that refinement in our case must be after projection.
Definition 5 (Refinement). A specification Γ 0 refines another specification Γ ,
denoted Γ 0 v Γ , if (1) O(Γ ) ⊆ O(Γ 0 ), (2) α(Γ) ⊆ α(Γ0 ), and (3) ∀t ∈ T (Γ 0 ) :
t/α(Γ) ∈ T (Γ ).
Using projection as suggested here, dynamic class extension (Section 3) is
well-behaved with respect to refinement: the new extended class refines the old
class. When considering liveness, the refinement relation must be extended to
exclude additional deadlocks in a refinement step (cf. Section 7).
Composition. When two viewpoint specifications are composed, they synchronize on common events. However, as our focus is on the observable behavior of
the specifications, internal communication between the objects of the composed
specification is hidden.
Definition 6. The internal events of a set
S S of objects are all communication
events between objects of the set, I(S) , o1 ,o2 ∈S {ho1 , o2 , . . .i, ho2 , o1 , . . .i}.
We will write I(Γ ) instead of I(O(Γ )). As we consider component viewpoints
here, events that are internal in one specification may be observable in another.
We say that two specifications are composable if this is not the case [28, 29].
Definition 7 (Composition). Let Γ and ∆ be composable component specifications. Then Γ ||∆ is the specification hO, α, T i where (1) O , O(Γ )∪O(∆), (2)
α , α(Γ)∪α(∆)−I(O), and (3) T , {h/α |h/α(Γ) ∈ T (Γ ) ∧ h/α(∆) ∈ T (∆) }.
4.2
Behavioral Interfaces
Clearly, the specifications of Section 4.1 can be given a syntax à la Abel. In this
section, we consider such a treatment for interface specifications in a generic
manner. These specifications are behavioral interfaces; they can be supported
by different objects. An interface can be implemented by different classes and a
class can implement different interfaces. An interface has the following syntax:
interface F [htype parametersi] (hcontext parametersi)
inherits F1 , F2 , . . . , Fm
begin
with G
opr m1 (. . .)
..
.
opr mn (. . .)
asm <formula on local trace restricted to one calling object>
inv <formula on local trace>
where <auxiliary function definitions>
end
Interfaces can have both type and context parameters, the latter typically
describes the minimal environment representing static links needed by objects
that support the interface. An initiation and a completion event is associated
with each method declaration (ranging over method parameters). In the interfaces, we use the keyword “this” to denote the object supporting the interface
and “caller” to denote an object in the environment. We shall now briefly consider the remaining parts of the syntax, for technical details and discussion the
reader is referred to [29, 43]. The use of interfaces for specification purposes is
illustrated by way of examples in Section 5.
Assumption guarantee predicates. In ODS, the environment in which an object
exists is subject to change and specifications are relative to an assumed behavior of the environment. Hence, we use the assumption guarantee specification
style [32], but we adapt it to our setting of observable behavior. Assumptions
are the responsibility of the objects of the environment; therefore, assumption
predicates consider traces that end with input to the current interface and only
communication with a single object in the environment. An assumption predicate A(x, y, h) ranges over objects x in the environment, supporting objects y, and
traces h. Let in(h, o) and out(h, o) denote functions that return the longest prefix of a trace h ending with an input or output event to an object o, respectively.
If A is an assumption predicate, define Ain (x, h) , ∀o ∈ E : A(o, x, in(h, x))
and Aout (x, h) , ∀o ∈ E : A(o, x, out(h, x)). Invariants are the responsibility of
the object supporting the interface; they are guaranteed when the assumption
holds and consider traces that end with output from the current interface. If
I(x, h) is an invariant predicate ranging over supporting objects x and traces h,
define I out (x, h) , I(x, out(h, x)) ∧ Aout (x, h). The trace set T (Γ ) of a specification Γ with assumption predicate AΓ and invariant predicate IΓ is the largest
out
prefix-closed subset of {h ∈ Seq[α(Γ)] | Ain
Γ (this, h) ⇒ IΓ (this, h)}.
Inheritance. Multiple inheritance is allowed for interfaces, but cyclic inheritance
graphs are not allowed. If an interface F is declared with an inheritance clause,
the alphabets of the super-interfaces are included in the alphabet of F and the
traces of F must be in the trace sets of the super-interfaces when restricted to
the relevant alphabets. In the subinterfaces, we can declare additional methods
and behavioral constraints. An interface will always refine its super-interfaces.
Mutual dependency. Because objects are typed by interface, we can specify that
only objects of a particular interface (a cointerface) may invoke the methods of
the current interface, using the keyword with. Furthermore, the current interface knows the methods of the caller visible through the cointerface. This gives
strong typing in an asynchronous setting. Semantically, a cointerface declaration
changes the alphabet of the current interface as the communication environment
is reduced whereas new methods of the caller are added.
5
Case Study: the Software Bus
In this section, we illustrate the use of interface specifications to capture viewpoints concerning the dynamic nature of a software bus, a communication platform to which processes may register in order to share data and resources. (This is
a stripped version of an actual system used for monitoring nuclear power plants,
more details on the software bus and its specification can be found in [31].) We
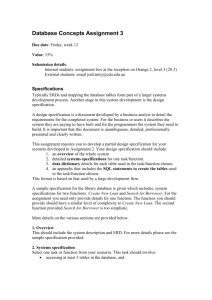
consider a distributed architecture for the software bus, with a portmapper and
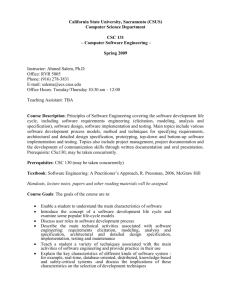
a collection of data servers. The general lay-out of the software bus is shown
in Figure 1. Processes may connect (and disconnect) to any data server. The
task of the portmapper is to manage registration of processes, and communicate information about processes to other processes, via their data servers. Data
servers communicate with each other in order to share data processing tasks,
on behalf of their processes. These tasks include the creation of variables, the
assignment of values to variables, accessing the values of variables, and destroying variables. The software bus system is object-oriented: classes, functions, and
variables are treated as software bus objects, i.e. as manipulatable data in the
software bus system. An object in the system is identified either by reference or
by a name and a reference to its parent. For specification purposes, we identify
two types; Name for object names and Ref for object references. The latter
will have subtypes, among them we find ParentRef for parent objects and
AppRef for application processes. We shall now specify a data server interface
SB_Data for manipulation of data, a data server interface SB_Connections
for updating information on remote applications, and a portmapper interface
SB_Portmapper.
5.1
Communication between Data Servers
The interface SB_Data considers methods for object manipulation between
data servers in the SoftwareBus. For brevity, we will here only consider two
such methods:
User
Application
1
User
Application
i
Data Server 1
User
Application
j
User
Application
n
Data Server n
Portmapper
SoftwareBus
Figure 1. Decomposition of SoftwareBus. Data servers have an interface SB_Data
available to other data servers and an interface SB_Connections available to the
portmapper. The portmapper offers an interface SB_Portmapper to data servers.
opr id ( in name: Name , parent_ref: ParentRef ; out obj_ref: Ref )
opr del_obj ( in obj_ref: Ref )
Intuitively, the method id obtains the reference to an object at a remote server
and del_obj deletes an object at a remote server. It is assumed that a data
server only attempts to delete an object to which it has obtained a reference
(via id). If the object is already deleted by another remote server, the method
call will not be completed (until the reference has been recreated). We here
denote by Sr the set of events that can be associated with a given reference
r, Sr = {x←y.id(_, _; r), x→y.del_obj(r), x←y.del_obj(r) | x, y ∈ Objects},
ignoring irrelevant parameters by underscore. The assumption can be formalized
as follows:
Ad (x, y, h) = ∀r ∈ Ref :
h/Sr prs [[x←y.id(_, _; r)]+
x→y.del_obj(r) x←y.del_obj(r)]∗
The invariant is concerned with output from the current object, in this case
completion events to the methods id and del_obj. The assumption above states
that a data server will wait for the completion of a call to the current data
server before making new calls to this server. We check if there is a pending call
to del_obj(r), using a predicate pending:
pending(mtd, x, y, h) = h/{x→y.mtd(. . .), x←y.mtd(. . .)}
∈ [x→y.mtd(. . .), x←y.mtd(. . .)]∗ x→y.mtd(. . .)
As we ignore object creation in this example, we assume that an object exists
once it has been assigned a reference in a call to id. Considering the entire history
of a data server (seen through the SB_Data interface), we can identify traces
after which we believe that a reference is to an existing object:
¬ exists(r, ε)
¬ exists(r, h ` x←y.del_obj(r))
exists(r, h ` x←y.id(_, _; r))
exists(r, h ` others) = exists(r, h)
In this definition, cases are in the considered order and ‘h ` others’ handles the
remaining cases. The invariant Id (h, x) expresses that pending calls to del_obj(r)
are only completed when the object with reference r is known to exist:
Id (x, ε) = true
Id (x, h ` y←x.del_obj(r)) = pending(del_obj, y, x, h) ∧ exists(r, h)
Id (x, h ` others) = true
Remark how the case distinction with ‘others’ allows us to ignore irrelevant
events in the above predicates. This way, the predicates can be given in a compact, readable format when only a few events of an alphabet need to be considered. Also, this predicate format facilitates reuse of the predicates in interfaces
with extended alphabets, typically in subinterfaces.
We now define the interface SB_Data (types for method parameters are as
given above).
interface SB_Data
begin
opr id ( in name, parent_ref; out obj_ref )
opr del_obj ( in obj_ref )
asm Ad (caller, this, h)
inv Id (this, h)
end
This interface does not consider calls to other servers. The next step is to
let SB_Data be inherited by a new interface SB_DataAct, which includes
SB_DataAct as a cointerface and ∀o ∈ E : Ad (this, o, h) as invariant.
5.2
Communication with the Portmapper
In this section, we consider communication between the portmapper and the
data servers. First, we specify an interface of the data server, which offers a
method going_down to portmappers:
interface SB_Connections
begin
with SB_Portmapper
opr going_down( in ref: AppRef )
asm true
inv true
end
By declaring SB_Connections to be a cointerface of SB_Portmapper,
the interface of the portmapper, the events associated with going_down are included in the alphabet of SB_Portmapper and we can specify the actual use
of the method there. The method will be used to signal that applications in the
environment are about to leave the SoftwareBus. When an application enters
the software bus, its (current) data server will register it with the portmapper,
and when it exits, likewise. Furthermore, a data server may contact the portmapper in order to know if (and where) an application is currently registered.
The associated methods are
opr
opr
opr
opr
init ( in name: Name )
exit (in name: Name )
conn_app ( in appl_name: Name ; out appl_ref: AppRef )
disc_app ( in appl_ref: AppRef )
Intuitively, init signals that an application enters the system, exit signals that
an application leaves the system, conn_app establishes a logical connection to
appl_name, and disc_app disconnects the logical connection to appl_ref . Obviously, logical connections should only be disconnected after having been established, which we formalize by the predicate
conns(x, y, h) = ∀r ∈ AppRef : h/r prs [x←y.conn_app(_; r)
x→y.disc_app(r) x←y.disc_app(r)]∗
Furthermore, logical connections and disconnections from an application x may
only occur when x is registered with the portmapper y.
is_reg(x, y, h) =
h/x prs x→y.init(x) x←y.init(x)
[x→y.conn_app(_) | x←y.conn_app(_; _)
| x→y.disc_app(_) | x←y.disc_app(_)]∗
x→y.exit(x) x←y.exit(x)
The portmapper assumes that all data servers adhere to this behavior, so define
its assumption by the formula
Apm (x, y, h) = is_reg(x, y, h) ∧ conns(x, y, h).
The invariant of SB_Portmapper considers when output from the portmapper should occur. For this purpose, we determine if an application is currently
registered in the system by a predicate up on the history:
¬ up(x, y, ε)
up(x, y, h ` z←y.init(x))
up(x, y, h ` others) = up(x, y, h)
Similarly, we determine if an application a1 has an established logical connection
to another application a2 via the portmapper p after history h by the predicate
conn_up(a1 , a2 , p, h):
¬ conn_up(a1 , a2 , p, ε)
conn_up(a1 , a2 , p, h ` a1←p.conn_app(a2 ))
¬ conn_up(a1 , a2 , p, h ` a1←p.disc_app(a2 ))
¬ conn_up(a1 , a2 , p, h ` p←a1 .going_down(a2 ))
conn_up(a1 , a2 , p, h ` others) = conn_up(a1 , a2 , p, h)
We consider a logical connection closed (or broken) if a1 gets a notification from
the portmapper that going_down(a2 ). (The events associated with this method
come from the cointerface.) We use the abbreviation notified(n, p, h) below for
the the predicate ∀a ∈ AppRef : ¬ conn_up(a, n, p, h) and define the invariant
of SB_Portmapper as follows:
Ipm (p, ε)
Ipm (p, h ` a←p.init(n)) =
¬ up(n, _, h) ∧ pending(init(n), p, a, h) ∧ Ipm (p, h)
Ipm (p, h ` p→a.going_down(n)) =
conn_up(a, n, p, h) ∧ pending(exit(n), p, _, h) ∧ Ipm (p, h)
Ipm (p, h ` a←p.exit(n)) =
up(n, _, h) ∧ notified(n, p, h) ∧ pending(exit(n), p, a, h) ∧ Ipm (p, h)
Ipm (p, h ` a←p.conn_app(n, r)) =
¬ conn_up(a, n, p, h) ∧ pending(conn_app(n), p, a, h) ∧ Ipm (p, h)
Ipm (p, h ` a←p.disc_app(n)) =
conn_up(a, n, p, h) ∧ pending(disc_app(n), p, a, h) ∧ Ipm (p, h)
Ipm (p, h ` others) = Ipm (p, h)
The invariant allows for asynchronous calls to the portmapper, as other events
may occur between the initiation and completion of any given call. In particular, the invocation of exit explicitly results in calls from the portmapper. The
SB_Portmapper interface is now specified (types for method parameters are
as given above).
interface SB_Portmapper
begin
with SB_Connections
opr init( in n )
opr exit( in n )
opr conn_app( in n; out r )
opr disc_app( in r )
asm Apm (caller, this, h)
inv Ipm (this, h)
end
5.3
Internal Behavior of the Data Server
In this section, we consider how the two interfaces of the data servers can be
combined in order to give a more complete specification of the data server in an
interface SB_DataServer. In particular, we want to express that a data server
can only make calls to another data server when it has an established logical
connection to that data server. For convenience, we inherit auxiliary predicates
as well as the semantics through interface inheritance.
This interface considers calls made by the current object, so we will strengthen
the invariant of the data server (which we presently perceive as the conjunction
of its two interface invariants, restricted to appropriate projections on traces).
Define
Ids (x, ε)
Ids (x, h ` x→y.id(_)) = conn_up(x, y, p, h) ∧ Ids (x, h)
Ids (x, h ` x→y.del_obj(_)) = conn_up(x, y, p, h) ∧ Ids (x, h)
Ids (x, h ` others) = Ids (x, h)
The interface SB_DataServer can now be specified by
interface SB_DataServer
inherits SB_Connections, SB_Data
begin
inv Ids (this, h)
end
By definition, any data server with the SB_DataServer interface will also
support the two super-interfaces SB_Data and SB_Portmapper. At the
semantic level, super-interfaces are always refined by their subinterfaces.
6
Composing Assumption Guarantee Specifications
Just as multiple inheritance lets us combine interfaces that are supported by the
same objects, we can compose specifications where this need not be the case.
Definition 7 of Section 4.1 defined composition semantically. In this section we
consider a composition rule for specifications made in the assumption guarantee
style of interfaces, thus a specification Γ is on the form
out
hO(Γ ), α(Γ), {h ∈ Seq[α(Γ)]|Ain
Γ (h) ⇒ IΓ (h)}i,
where AΓ and IΓ are the assumption and invariant predicates associated with
Γ . The supporting objects are here given by O(Γ ), the functions in(h) and
out(h) return the longest prefix of h that ends with input or output to any
object in O(Γ ), respectively. Let Γ + ∆ denote the syntactic composition of two
specifications Γ and ∆. We want to derive an assumption A and an invariant I
that describe the traces of Γ + ∆ from the predicates of Γ and ∆.
Composition should encapsulate internal communication, so the communication environment E(Γ + ∆) excludes objects from the object sets O(Γ ) and
O(∆). Therefore, for the object set, communication environment, alphabet, and
internal event set, we follow the semantics (Definition 7) and define O(Γ + ∆) ,
O(Γ ||∆), E(Γ + ∆) , E(Γ ||∆), α(Γ + ∆) , α(Γ||∆), and I(Γ + ∆) , I(Γ ||∆).
Let h ∈ Seq[α(Γ + ∆)]. Now, define an assumption predicate for Γ + ∆ by
in
Ain (h) , Ain
Γ (h/α(Γ)) ∧ A∆ (h/α(∆))
0
= ∀o ∈ E : AΓ (o, in(h/o)) ∧ A∆ (o, in(h/o)).
Due to the quantification over objects in the environment, we have that AΓ (h) ⇒
AΓ (h \ I(Γ + ∆)). However, the assumption Ain (h) above is not strong enough
to guarantee either of the invariants IΓ and I∆ , because nothing has been assumed with regard to the internal communication between objects of the two
specifications. This leads to the proof conditions (1) and (2) below.
In contrast to the assumption, the invariant does not quantify over the objects
of the environment. Therefore, we cannot derive an invariant I directly from the
invariants of Γ and ∆ by removing internal communication; we need to consider
the full alphabet. Let h ∈ Seq[α(Γ) ∪ α(∆)]. We first define the basic invariant
I of the composition by
I basic (h) , IΓ (out(h/α(Γ))) ∧ I∆ (out(h/α(∆))) ∧ Aout (h).
However, the basic invariant predicate takes internal events into account. It is
well-known that hiding corresponds to the introduction of existential quantifiers [1]. For the invariant, we extend the alphabet of Γ + ∆ with the hidden
internal events, and hide the extension inside an existential quantifier. Without
inherited specifications, the derived invariant is
I out (h) , ∃h0 ∈ Seq[α(Γ) ∪ α(∆)] : h = h0 \ I(Γ + ∆) ∧ I basic (h0 ).
Inheritance. We will assume that specifications can inherit other specifications
like the interfaces of Section 4. Say that a specification Γ inherits another specification Σ. At the semantic level, inheritance is interpreted as refinement: for
all traces h ∈ T (Γ ), we have that h/α(Σ) ∈ T (Σ). At the syntactic level, inheritance restricts the set of possible traces h defined by the assumption and invariant predicates by additional conjuncts of the form Ain
Σ (h/α(Σ)) ⇒ IΣ (h/α(Σ)).
However, in the composition Γ + ∆, these additional conjuncts are only valid
for the extended trace, so they must be placed inside the existential quantifier
of the invariant. (Due to hiding, it is not the case that Γ + ∆ directly inherits
the super-interfaces of Γ and ∆.) Therefore, considering inheritance, we define
the invariant of a composition as follows.
Definition 8. For any specification S, we denote by AS and IS its assumption
and invariant predicate, respectively. Consider two specifications Γ and ∆ and
denote by Σ1 , . . . , Σn the specifications inherited by either Γ or ∆. The invariant
of the composition Γ + ∆ is defined as
I out (h) , ∃h0 ∈ Seq[α(Γ) ∪ α(∆)] : h = h0 \ I(Γ + ∆) ∧
0
out 0
basic 0
(h ),
(∀i ∈ {1, . . . , n} : Ain
Σi (h /α(Σi )) ⇒ IΣi (h /α(Σi ))) ∧ I
with the associated proof conditions
out
in
∀h ∈ Seq[α(Γ)] : (Ain
Γ (h) ∧ IΓ (h)) ⇒ A∆ (h/I(Γ + ∆)) and
out
in
∀h ∈ Seq[α(∆)] : (Ain
∆ (h) ∧ I∆ (h)) ⇒ AΓ (h/I(Γ + ∆)).
(1)
(2)
In order to maintain reasoning control for Γ + ∆, output from Γ should not
break the assumption of ∆ and vice versa. The proof conditions (1) and (2) ensure that the internal communications of Γ + ∆ respect the assumptions AΓ and
A∆ of the two component specifications Γ and ∆. Circularity in compositional
proofs is avoided because assumption predicates concern traces that end with
input whereas invariants concern traces that end with output.
With the assumption and invariant predicates derived for Γ + ∆, we define
the trace set T (Γ + ∆) as the largest prefix-closed subset of
{h ∈ Seq[α(Γ + ∆)] | Ain (h, o) ⇒ I out (h)}.
6.1
Soundness of the Composition Rule
In this section, the proof rule for composition is shown to be semantically sound,
i.e. that any trace in the semantically defined composed specification is included
in the trace set obtained through the proof rule: T (Γ ||∆) ⊆ T (Γ + ∆). This
corresponds to the notion of soundness for regular verification systems, see for
instance Apt and Olderog [4]. Here, the soundness proof relies on the distinction
between input and output events; when we consider communication between
two objects, input to one is output from the other, so we can reason inductively
about the communication traces between the two objects. The proof extends a
proof made by Dahl and Owe [17] for a somewhat simpler formalism.
Proof. Let Γ, ∆, Σ1 , . . . , Σn (where n ≥ 0) be (component) specifications such
that every Σi is inherited by either Γ or ∆. Assuming that the proof conditions
(1) and (2) hold, we now show that T (Γ ||∆) ⊆ T (Γ + ∆). Observe that, for
in
any h ∈ T (Γ + ∆), if one of Ain
Γ (h/α(Γ)) and A∆ (h/α(∆)) does not hold,
in
neither does A (h). Now, consider a trace h ∈ Seq[α(Γ) ∪ α(∆)] such that
h \ I(Γ + ∆) ∈ T (Γ + ∆). By assumption, for any such trace h, we have that
out
Ain
Γ (h/α(Γ)) ⇒ IΓ (h/α(Γ)), and
out
Ain
∆ (h/α(∆)) ⇒ I∆ (h/α(∆)).
(3)
(4)
We must show that if Ain (h\I(Γ +∆)) holds, then I(h\I(Γ +∆)) also holds. The
proof is by induction over h, but we show a somewhat stronger result, namely
∀h : Seq[α(Γ) ∪ α(∆)] :
out
∀i ∈ {1, . . . , n} : Ain
Σi (h/α(Σi )) ⇒ IΣi (h/α(Σi ))
out
out
∧IΓ (h/α(Γ)) ∧ I∆ (h/α(∆))
∧AΓ (in(h/I(Γ + ∆))) ∧ A∆ (in(h/I(Γ + ∆))),
(5)
from which the invariant follows. Two observations are in order at this point.
First, due to quantification over the objects of the communication environment
in assumptions, Ain (h \ I(Γ + ∆)) entails
in
Ain
Γ (h \ I(Γ + ∆)/α(Γ)) ∧ A∆ (h \ I(Γ + ∆)/α(∆)).
(6)
Second, inheritance graphs are acyclic, so we can inductively assume soundness
in
for inherited specifications. Once we have established Ain
Γ and A∆ , we get
out
Ain
Σi (h/α(Σi )) ⇒ IΣi (h/α(Σi )) for 0 < i ≤ n.
(7)
We now proceed with the proof. As we are dealing with safety properties,
the formula (5) holds for the empty trace ε. Next, consider the induction step.
We assume that (5) holds for a trace h and show that it holds for h ` m, where
m ∈ α(Γ) ∪ α(∆). Assume first that m ∈ α(Γ + ∆), such that Ain (h ` m). The
induction hypothesis gives us
AΓ (in(h ` m/I(Γ + ∆))) = AΓ (in(h/I(Γ + ∆))) and
A∆ (in(h ` m/I(Γ + ∆))) = A∆ (in(h/I(Γ + ∆))),
in
so by observation (6), both Ain
Γ (h ` m) and A∆ (h ` m) hold. Then, by observations (3) and (4), the invariants
IΓout ((h ` m)/α(Γ)) and
out
I∆
((h ` m)/α(∆))
hold and by (1), (2), and (7), we can conclude that (5) holds for h ` m. Now,
assume that m ∈ I(Γ + ∆). We have four possibilities. If we consider two object
identifiers o1 and o2 such that o1 ∈ O(Γ ) and o2 ∈ O(∆), these possibilities are
o1→o2 .m(. . .), o1←o2 .m(. . .), o2→o1 .m(. . .), and o2←o1 .m(. . .). In the first case,
m is the initiation of a method m in o2 by o1 . But then the event is an output
event for Γ and hence, the assumption of Γ holds by the induction hypothesis:
AΓ (in((h ` m)/I(Γ + ∆)))=AΓ (in(h/I(Γ + ∆) ` m))
=AΓ (in(h/I(Γ + ∆))).
Consequently, by observation (6), the assumption Ain
Γ (h ` m) of specification Γ
holds. Therefore, by assumption (3), the invariant IΓout (h ` m) of specification
Γ holds. Now we know that both the assumption and invariant of Γ hold, so
by proof condition (1), the assumption A∆ (in(h ` m/I(Γ + ∆))) holds. Then,
by (6), we get the assumption of ∆ and finally, by observation (4), the invariant
out
(h ` m) holds. As we have established the invariants of Γ and ∆, observation
I∆
(7) lets us conclude.
In the next case, m = o1←o2 .m(. . .) is an output event from specification ∆.
Here, we first consider the assumption A∆ of ∆, which gives us:
A∆ (in(h ` m/I(Γ + ∆))) = A∆ (in(h/I(Γ + ∆))),
as m disappears by projection. The predicate holds by the induction hypothesis.
By similar reasoning to the previous case, we can now establish the invariants
of Γ and ∆, and (7) gives us the result. The two last cases are similar to these.
7
Discussion
The main objective of this paper has been to show how Dahl’s notion of objectoriented specification can be extended for reasoning about open distributed systems, as object-orientation is a natural paradigm for ODS [17,26]. In this section,
we draw some lines to related work and suggest some future extensions to the
work we have presented in this paper.
Our approach is based on trace descriptions of (aspects of) the observable
behavior of objects and components. Traces are well-known from the literature
on processes, data flow networks, and modules [8, 25, 33, 39, 45]. These formalisms do not claim to be object-oriented and tend to be based on synchronous
communication along channels, fix-point reasoning, and possibly infinite traces,
in contrast to Abel’s approach. Object reference passing can be simulated using
named channels instead of named objects, for example in the π-calculus [49], but
using explicit object identifiers in the communication events allow a more natural representation. Explicit object identifiers may be found in languages such as
Actors [2] and Maude [9]. Both these formalisms also allow asynchronous communication, exchange of object identities, and a large degree of modifiability.
However, they are specialized towards system modeling rather than development and reasoning control, lacking for instance refinement notions that capture
correctness for system development and modification.
We find specification in terms of observable behavior particularly attractive for reasoning about open distributed systems, where implementation detail
need not be available for (client) objects in the environment. On the contrary,
such detail can be intentionally hidden, being the intellectual property of some
third-party manufacturer. In this respect, our approach is related to coalgebraic
formulations of object-orientation such as [27], in which a class specification has
assertions that equate sequences of observations on objects of the class. In general these assertions consider the entire history of the object and the conjunction
of assertions thus resembles Abel’s history invariant. However, the coalgebraic
approach does not seem to allow the kind of dynamic class extensions we have
considered here, as the objects are semantically defined in terms of their statically
given classes. Of course, state-based approaches may equally well supply a specification of an abstract state that does not directly reflect the implementation
of a component. However, refinement becomes complicated when data structures
change, in particular for aspects, described using different data structures, and
dynamic extensions, captured in our formalism using projection on traces.
The idea of separation of concerns in specification seems to have originated
with Parnas [44]. Partial specifications are perhaps best known for describing
typical case-scenarios in specification notations such as Message Sequence Charts
and UML. However, it is unclear how different cases relate to each other through
composition and refinement in these notations. The use of interrelated viewpoints
is recommended for ODS by the ITU [26] and work on combining viewpoints in
this setting has been based on e.g. Object-Z [6,19] and timed automata [5]. Two
major differences between these approaches and ours are, first, that they are
state-based whereas we prefer to model objects at an early stage by observations
and, second, they are synchronous whereas we find asynchronous communication
natural for distributed systems. Viewpoints as presented in this paper resemble
aspects of aspect-oriented programming [34], describing aspects by their observable behavior as system services cross-cutting an object grid. Composition in
our formalism corresponds to synchronization of aspects, which suggests a formalism for specification and reasoning about the development of aspect-oriented
programs. Further investigation in this context is future work.
Specifications using observable behavior let us describe objects in an abstract
way, describing properties by extracting information from the history. Furthermore, we can model object behavior in a constructive graphical way with trace
patterns. From such graphical specifications, the step to implementation in a
state-based guarded command language is straightforward. Much work has been
done on developing useful graphical specification notations, for instance with
Statecharts, Petri nets, and UML, and on their formalization. Interestingly, there
is also work on graphical representations of formal notations, an example being
Actor specification diagrams [47]. Our trace patterns try to visualize behavior
and could perhaps be expressed graphically in a similar way.
Finally, the formalism as presented here only considers safety specifications.
In the context of open asynchronously communicating systems, liveness properties are largely dependent on the environment, which we do not control. A
weak form of liveness is to identify deadlock deterministic objects, i.e. objects
where deadlock is not due to internal non-determinism. For deadlock deterministic objects, we can to some extent reason about liveness properties by means
of prefix-closed trace sets, without having to resort to a stronger apparatus including infinite traces, temporal logic, etc. We propose an incremental approach
by including exceptions in the reasoning formalism through refinement, and in
particular timeouts. Thus, we can reason about liveness properties of our own
objects even when the environment is unstable. Initial research in this direction
has been done in the context of fault tolerance [30], but more work remains.
8
Conclusion
The term “object-oriented specification” was coined by O.-J. Dahl for a specification style where the internal implementation details of objects are encapsulated
and behavior is expressed in terms of permissible observable communication.
An object’s observable communication history represents an abstract view of its
state, readily available for reasoning about past and present behavior. Using a
(mythical) history variable, the behavior of an object is determined by its communication history up to present time. The approach emphasizes mathematically
easy-to-understand concepts such as generator inductive function definitions and
finite sequences, avoiding fix-point semantics and infinite traces.
In this paper, we have shown how this approach can be extended in order to
reason about open distributed systems. In particular, we consider objects running in parallel, communicating by means of asynchronous remote method calls
by which object identifiers can be exchanged. In accordance with the ITU [26],
the approach supports partial specification by viewpoints, representing object
behavior in behavioral interfaces. Openness appears in the formalism by allowing new (sub)classes, new interfaces for old classes, and a restricted form of
dynamic class extension, while maintaining reasoning control.
Acknowledgments
In developing the ideas for this paper, the authors have benefited from collaboration with the members of the Adapt-FT project, and in particular with
Ole-Johan Dahl and Isabelle Ryl.
References
1. M. Abadi and L. Lamport. Conjoining specifications. ACM Transactions on Programming Languages and Systems, 17(3):507–534, May 1995.
2. G. A. Agha, I. A. Mason, S. F. Smith, and C. L. Talcott. A foundation for actor
computation. Journal of Functional Programming, 7(1):1–72, Jan. 1997.
3. B. Alpern and F. B. Schneider. Defining liveness. Information Processing Letters,
21(4):181–185, Oct. 1985.
4. K. R. Apt and E.-R. Olderog. Verification of Sequential and Concurrent Systems.
Texts and Monographs in Computer Science. Springer-Verlag, Berlin, 1991.
5. L. Blair and G. Blair. Composition in multi-paradigm specification techniques.
In R. Ciancarini, A. Fantechi, and R. Gorrieri, editors, Proc. 3rd International Conference on Formal Methods for Open Object-Based Distributed Systems
(FMOODS’99), pages 401–418. Kluwer Academic Publishers, Feb. 1999.
6. E. Boiten, J. Derrick, H. Bowman, and M. Steen. Constructive consistency checking
for partial specification in Z. Science of Computer Programming, 35(1):29–75, Sept.
1999.
7. G. Booch, J. Rumbaugh, and I. Jacobson. The Unified Modeling Language User
Guide. Addison-Wesley, Reading, Mass., 1999.
8. M. Broy and K. Stølen. Specification and Development of Interactive Systems.
Monographs in Computer Science. Springer-Verlag, 2001.
9. M. Clavel, F. Durán, S. Eker, P. Lincoln, N. Martí-Oliet, J. Meseguer, and J. F.
Quesada. Maude: Specification and programming in rewriting logic. Theoretical
Computer Science, 285:187–243, Aug. 2002.
10. O.-J. Dahl. Can program proving be made practical? In M. Amirchahy and D. Néel,
editors, Les Fondements de la Programmation, pages 57–114. Institut de Recherche
d’Informatique et d’Automatique, Toulouse, France, Dec. 1977.
11. O.-J. Dahl. Object-oriented specification. In B. Shriver and P. Wegner, editors,
Research Directions in Object-Oriented Programming, Series in Computer Systems,
pages 561–576. The MIT Press, 1987.
12. O.-J. Dahl. Verifiable Programming. International Series in Computer Science.
Prentice Hall, New York, N.Y., 1992.
13. O.-J. Dahl. The roots of object orientation: the Simula language. In M. Broy
and E. Denert, editors, Software Pioneers: Contributions to Software Engineering.
Springer-Verlag, June 2002.
14. O.-J. Dahl and K. Nygaard. SIMULA, an ALGOL-based simulation language.
Communications of the ACM, 9(9):671–678, Sept. 1966.
15. O.-J. Dahl, B. Myhrhaug, and K. Nygaard. (Simula 67) Common Base Language.
Technical Report S-2, Norsk Regnesentral (Norwegian Computing Center), Oslo,
Norway, May 1968.
16. O.-J. Dahl and O. Owe. Formal development with ABEL. In S. Prehn and H. Toetenel, editors, Formal Software Development Methods (VDM’91), volume 552 of
Lecture Notes in Computer Science, pages 320–362. Springer-Verlag, Oct. 1991.
17. O.-J. Dahl and O. Owe. Formal methods and the RM-ODP. Research Report 261,
Department of informatics, University of Oslo, Norway, May 1998.
18. W.-P. de Roever and K. Engelhardt. Data Refinement: Model-Oriented Proof Methods and their Comparison, volume 47 of Cambridge Tracts in Theoretical Computer
Science. Cambridge University Press, New York, NY, 1998.
19. J. Derrick, H. Bowman, and M. Steen. Viewpoints and objects. In J. P. Bowen
and M. G. Hinchey, editors, The Z Formal Specification Notation, 9th International Conference of Z Users (ZUM’95), volume 967 of Lecture Notes in Computer
Science, pages 449–468. Springer-Verlag, Sept. 1995.
20. C. Fischer. CSP-OZ: a combination of Object-Z and CSP. In H. Bowman and
J. Derrick, editors, Proc. 2nd IFIP Workshop on Formal Methods for Open ObjectBased Distributed Systems (FMOODS), pages 423–438. Chapman and Hall, London, 1997.
21. C. Ghezzi and M. Jazayeri. Programming Language Concepts. John Wiley & Sons,
3rd edition, 1998.
22. J. Goguen and J. Tardo. An introduction to OBJ: A language for writing and
testing formal algebraic program specifications. In N. Gehani and A. McGettrick,
editors, Software Specification Techniques. Addison-Wesley, 1986.
23. J. V. Guttag, J. J. Horning, S. J. Garland, K. D. Jones, A. Modet, and J. M. Wing.
Larch: Languages and Tools for Formal Specification. Texts and Monographs in
Computer Science. Springer-Verlag, 1993.
24. C. A. R. Hoare. An Axiomatic Basis of Computer Programming. Communications
of the ACM, 12:576–580, 1969.
25. C. A. R. Hoare. Communicating Sequential Processes. International Series in
Computer Science. Prentice Hall, Englewood Cliffs, NJ., 1985.
26. International Telecommunication Union. Open Distributed Processing - Reference
Model parts 1–4. Technical report, ISO/IEC, Geneva, July 1995.
27. B. Jacobs. Inheritance and cofree constructions. In P. Cointe, editor, 10th European
Conference on Object-Oriented Programming (ECOOP’96), volume 1098 of Lecture
Notes in Computer Science, pages 210–231. Springer-Verlag, July 1996.
28. E. B. Johnsen and O. Owe. Composition and refinement for partial object specifications. In Proc. 16th International Parallel & Distributed Processing Symposium
(IPDPS’02), Workshop on Formal Methods for Parallel Programming: Theory and
Applications (FMPPTA’02). IEEE Computer Society Press, Apr. 2002.
29. E. B. Johnsen and O. Owe. A compositional formalism for object viewpoints. In
B. Jacobs and A. Rensink, editors, Proc. 5th International Conference on Formal
Methods for Open Object-Based Distributed Systems (FMOODS’02), pages 45–60.
Kluwer Academic Publishers, Mar. 2002.
30. E. B. Johnsen, O. Owe, E. Munthe-Kaas, and J. Vain. Incremental fault-tolerant
design in an object-oriented setting. In Proc. Asian Pacific Conference on Quality
Software (APAQS’01), pages 223–230. IEEE Computer Society Press, Dec. 2001.
31. E. B. Johnsen, W. Zhang, O. Owe, and D. B. Aredo. Combining graphical and
formal development of open distributed systems. In M. Butler, L. Petre, and
K. Sere, editors, Proc. Third International Conference on Integrated Formal Methods (IFM’02), volume 2335 of Lecture Notes in Computer Science, pages 319–338,
Turku, Finland, May 2002. Springer-Verlag.
32. C. B. Jones. Development Methods for Computer Programmes Including a Notion
of Interference. PhD thesis, Oxford University, UK, June l981.
33. G. Kahn. The semantics of a simple language for parallel programming. In J. L.
Rosenfeld, editor, Information Processing 74: Proc. IFIP Congress 74, pages 471–
475. IFIP, North-Holland Publishing Co., Aug. 1974.
34. G. Kiczales, J. Lamping, A. Menhdhekar, C. Maeda, C. Lopes, J.-M. Loingtier,
and J. Irwin. Aspect-oriented programming. In M. Akşit and S. Matsuoka, editors,
Proc. 11th European Conference on Object-Oriented Programming (ECOOP’97),
volume 1241 of Lecture Notes in Computer Science, pages 220–242. SpringerVerlag, June 1997.
35. B. H. Liskov and J. M. Wing. A behavioral notion of subtyping. ACM Transactions
on Programming Languages and Systems, 16(6):1811–1841, Nov. 1994.
36. S. Malabarba, R. Pandey, J. Gragg, E. Barr, and J. F. Barnes. Runtime support
for type-safe dynamic Java classes. In E. Bertino, editor, 14th European Conference
on Object-Oriented Programming (ECOOP’00), volume 1850 of Lecture Notes in
Computer Science, pages 337–361. Springer-Verlag, June 2000.
37. S. Matsuoka and A. Yonezawa. Analysis of inheritance anomaly in object-oriented
concurrent programming languages. In G. Agha, P. Wegner, and A. Yonezawa,
editors, Research Directions in Concurrent Object-Oriented Programming, pages
107–150. The MIT Press, Cambridge, Mass., 1993.
38. R. Milner. Communicating and Mobile Systems: the π-Calculus. Cambridge University Press, May 1999.
39. J. Misra and K. M. Chandy. Proofs of networks of processes. IEEE Transactions
on Software Engineering, 7(4):417–426, July 1981.
40. O. Nierstrasz. A survey of object-oriented concepts. In W. Kim and F. Lochovsky,
editors, Object-Oriented Concepts, Databases and Applications, pages 3–21. ACM
Press and Addison-Wesley, Reading, Mass., 1989.
41. K. Nygaard and O.-J. Dahl. Simula 67. In R. W. Wexelblat, editor, History of
Programming Languages. ACM Press, 1981.
42. O. Owe. Partial logics reconsidered: A conservative approach. Formal Aspects of
Computing, 5:208–223, 1993.
43. O. Owe and I. Ryl. A notation for combining formal reasoning, object orientation
and openness. Research Report 278, Department of informatics, University of Oslo,
Norway, Nov. 1999.
44. D. L. Parnas. On the criteria to be used in decomposing systems into modules.
Communications of the ACM, 15(12):1053–1058, Dec. 1972.
45. D. L. Parnas and Y. Wang. The trace assertion method of module interface specification. Technical Report 89-261, Department of Computing and Information
Science, Queen’s University at Kingston, Kingston, Ontario, Canada, Oct. 1989.
46. G. Smith. The Object-Z Specification Language. Advances in Formal Methods.
Kluwer Academic Publishers, 2000.
47. S. F. Smith and C. Talcott. Modular reasoning for actor specification diagrams. In R. Ciancarini, A. Fantechi, and R. Gorrieri, editors, Proc. 3rd International Conference on Formal Methods for Open Object-Based Distributed Systems
(FMOODS’99), pages 401–418. Kluwer Academic Publishers, Feb. 1999.
48. N. Soundarajan and S. Fridella. Inheritance: From code reuse to reasoning reuse.
In P. Devanbu and J. Poulin, editors, Proc. Fifth International Conference on
Software Reuse (ICSR5), pages 206–215. IEEE Computer Society Press, 1998.
49. D. Walker. Objects in the π-calculus. Information and Computation, 116(2):253–
271, Feb. 1995.
50. A. Wang. Generalized types in high-level programming languages. Research Report
in Informatics 1, Institute of Mathematics, University of Oslo, Jan. 1974. Cand.
Real thesis.