of Permanent Magnet 'Bifilar' Wigglers 1987
advertisement

Vfj(;/J A-87-415
Analysis and Measurements of
Permanent Magnet 'Bifilar' Wigglers
J. Ashkenazy and G. Bekefi
November 1987
Department of Physics and Research Laboratory of Electronics,
Massachusetts Institute of Technology
Cambridge, Ma. 02139
This work was supported by the Air Force Office of Scientific Research, the National Science
Foundation, and one of us (J.A) was supported by the Chaim Weizmann Fellowship.
Submitted for publication to the IEEE Journal of Quantum Electronics.
Analysis and Measurements of
Permanent Magnet 'Bifilar' Helical Wigglers*
J. Ashkenazy and G. Bekefi
Department of Physics and Research Laboratory of Electronics,
Massachusetts Institute of Technology
Cambridge, MA. 02139
Abstract
Analysis and measurements of the permanent magnet 'bifilar' helical wiggler [1}, composed
of a cylindrical array of staggered bar magnets, are presented. The discreteness of the
magnets is taken into account, thus enabeling a calculation of the field strengths of the
fundamental and higher spatial harmonics. Calculations show
lhat
the performance of
this wiggler is expected to be comparable or better than that of a planar wiggler [2]
with similar parameters.
In addition, we have studied experimentally and analytically
samarium-cobalt-iron hybrids in which soft iron tubes were used to enhance and/or taper
the wiggler field amplitude.
*
This work was supported by the Air Force Office of Scientific Research, the National Sci-
ence Foundation, and one of us (J.A) was supported by the Chaim Weizmann Fellowship.
1
1. Introduction
Recently, we proposed a novel 'bifilar' helical wiggler for free-electron laser and cyclotron maser applications, composed of a cylindrical array of staggered rare-earth cobalt
(REC) bar magnets [1]. Such a wiggler is illustrated in Fig.1. An aluminum tube is grooved
on the outside with channels running parallel to its axis. The bar magnets, magnetized
at right angles to their broad faces, are inserted in each groove at alternating order so
that the magnetic moment of one magnet points inward, the next one outward, etc.. The
stagger is provided by precision machined nonmagnetic spacers placed at the beginning of
each channel and differing in length by lu/N, where N is the number of parallel grooves
and
4. is the desired periodicity.
An external nonmagnetic tube (not shown) fits over this
structure, thereby keeping the magnets in place. Figure 2 shows schematically the magnet
arrangment (a) in cross sectional view and (b) in side-view. It is seen to be composed of
two helical strips made of discrete bar magnets. The two strips have opposite magnetization and a periodicity 1., = 21, where I is the length of each bar magnet. An approximate
analogy, found between this wiggler and the current carrying bifilar wiggler, enables a
simple though approximate calculation of the field strength [1].
In the present paper we expand the above analysis to include the effects of the discreteness of the bar magnet arrangement. A comparison with the performance of the planar
wiggler [2] is also made. In addition, we have investigated hybrid configurations which use
soft iron to enhance and/or taper the field strength.
The approximate calculation, based on an analogy to the bifilar wiggler, is summarized
in section 2. A more elaborate analysis, which takes into account the fact that the wiggler
is built of discrete bar magnets, is presented in section 3. It leads to an analytical solution
for the magnetostatic field from which an expression for the wiggler field amplitude on
axis is derived. In section 4, spatial field harmonics are discussed and their relative field
amplitude on axis is calculated. This is useful in wiggler design, whose goals are typically, to
maximize the field strength while keeping the field harmonics as low as possible. In section
5, the REC helical and planar wigglers are compared. It is shown that for comparable
design parameters both will have roughly the same field strength.
A REC helical wiggler, with the magnets oriented azimuthally instead of radially (as
2
was the case in previous sections), is analysed in section 6. The field strength achieved
by this arrangement is somewhat smaller than for the radial configuration. However, it
provides an additional degree of freedom for varying the field strength. In section 7 a
hybrid configuration, in which the wiggler is inserted inside a soft iron tube, is discussed.
For radially oriented magnets it is found to enhance the field strength. Since this effect
depends on the internal radius of the soft iron tube, it also provides a simple way to taper
the field amplitude for the purpose of efficiency enhancement of free electron lasers [31. In
section 8 we present results of measurements of magnetic field amplitude and field quality
of four different wigglers. In addition, adiabatic tapering can be achieved by insertion into
the wiggler a soft iron tube with a tapered wall thickness, as is discussed in section 9. A
summary of the results is presented in section 10.
2. Continuum approximation for the field amplitude
As a first approximation, the wiggler can be represented by two continuous helical
strips of opposite magnetization.
Then, the magnetization is replaced by an effective
surface current density at the interfaces between the strips (see eq.(A8) of the appendix
and Fig. 2(b)). What we get is equivalent to a bifilar wiggler, made of two helical current
sheets having a radial thickness equal to that of the magnets. The current density is equal
to 2B,/po where B, is the remanent magnetization. Thus, using the expression for the
field of a bifilar wiggler with an infinitely thin wire [4], and integrating over the thickness
of the magnetic material in the radial direction r 2 - rl, we get:
B
where k,, =
f[2E
K (z)dzW VjV{Ih(nk~,r)ain[n(O - kz)1}
(1)
, n = 1,3,5..., x, = nk 1 ,rl, X2 = nk~,r2 , In(z) and Kn(z) are the modified
Bessel functions of the first and second kinds and Kn(z) = -K4-(z).
From eq.(1) we derive the expression for the field strength on axis:
2Br
7r
B,, z -{U(k
,r 1 ) - U(kwr 2 )}F.,.m
(2)
where U(z) = zK 1 (z) + Ko(z). Fmi is a semiempirical filling factor, which takes acount
of the gaps between the grooves and is equal to the cross sectional area of magnetic material
3
divided by the total area between r, and r2. For bar magnets with a square cross sectional
area (see Fig.2a),
N(r2 - r)
Fei
7r(r
2
(3)
+ r,)
3. Field amplitude calculation for a discrete magnet distribution
Eq.(1) is an appproximation which fails to take account of the discrete properties of
the magnets and thus can give no information concerning the amplitudes of the higher
spatial harmonics. This is important because typical design goals would be to maximize
the field strength on axis while keeping the field harmonics as low as possible. While for
the planar wiggler usually only four magnets per row per period are used [2], this number
can vary for the helical wiggler and is in fact an additional design parameter. Thus, the
dependence of the field profile on this parameter is important.
In the case of the discrete magnet problem the surface current model of section 2
becomes less useful (see Figure 2(b)).
Therefore we use the approach of the effective
charge distribution (see appendix). The bar magnets are assumed to have a trapezoidal
cross section as shown in Fig. 3. When the magnets are thin compared to the radius
i.e. r2 - r, < rl, this is a good approximation to bar magnets with square cross section.
In addition, when thick magnetic material is desired in order to achieve stronger fields,
the use of trapezoidal bar magnets rather than square ones, also yields a higher filling
factor. We take the magnetization of each bar magnet to be constant and radial. Then, the
magnetization in the volume between r, and r2 is a function of 8 and z only: M = iM(O, z).
This corresponds to an effective magnetic charge distribution p,, = - M('z), for which the
magnetic scalar potential in the region r < ri can be solved (see appendix). M(6, z) can
then be written as a sum over the contributions of each groove, shifted in z according to
the pitch. The contribution to M(6, z) of each groove is a square-wave in z multiplied by
a rect function in 6:
N-1
M(O, z) = y
h(z ) =
I
1-1
It
h(z - -)(
N(
if O
-
2r
if 0 < z - 1wk < 1w/2 0
< z - lk<
if -l/2
)
4
(4)
(5 )
where k = 0, ±1, ±2, ..., and
f-
(=
.N
N <
e<
<
/N
(6)
otherwise.
0
As can be seen from Fig. 3, c is the filling factor for this configuration.
Our purpose is to write our solution in a form which is as close as possible to that of the
continuous case. In a sense, this is equivalent to finding the eigenfunctions of a discrete
helix, or, to use the terminology of antenna theory, the 'array factor' of this structure.
Substituting Fourier series for h(z) and g(6) and after some manipulations, one obtains:
4B,
M(8, z) = -4r
oln
with the selection rules:
ain(en'r/N) 1
(n 'r/N)
n
-in[n'+nkz]
n
(7)
n= 1,3,5,..
n +n' =iN
i
integer
Inserting eq.(7) in eq.(A4) of the appendix, we find for the field in the region r < ri:
4B
B = -=
)
X
sin(en'r/N)
,
xK., (x)dz
(r/N)
where z 1 = nkeri, X2 = nk.r
2
2V{fI
(nker)in[n'0+ nk~z]} (8)
and where the same selection rules as for eq.(7) apply here
also.
We notice that for n' = -n (i = 0) we get the expression for the continuous helix,
which differs from eq.(1) only by the quantity 'in(enr/N)
(nir/N)
This quantity represents the
filling factor for trapezoidal magnets, corresponding to the semiempirical filling factor of
eq.(3) applicable to square magnets. Thus, the field strength on axis is given by:
2B,
BW
=
T
sin(exr/N)
{U(k.rl) --
U(k.r 2 )}
(9
(F/N)(9)
(7/N)
4. Field harmonics on axis
The terms in eq.(8) with n + n'
#
0 represent the deviation from the field of a
continuous helix due to the discreteness of the magnets. If N, the number of grooves is
5
even, a non-vanishing contribution to the field on axis comes from the terms with n' = ±1
i.e. n = iN T 1. From eq.(8) we get for the field strength of the two lowest harmonics on
axis, n = N F 1:
BN1 _
B
NF 1
U[(N F l)k.ri] - U[(N F 1)k.r2]B,
U(keri) - U(ker 2 )
(10)
Because of the exponential behavior of U(x), BNFI depends strongly on the number
of grooves. As an example, we take a wiggler with 1w = 9.6cm, r1 = 1.0cm and r2 =
1.4cm, which represent experimental parameters discussed in reference 1 and in section 8
below. For N = 6 we get Bw, z 0.05B. and B., - 0.01B,, while for N = 12 we have
B L11 < 0.001Bw. In our prototype wiggler N = 12, and it is therefore not surprising that
field distortion due to higher harmonics was not observed in these measurements.
5. Comparison with the planar wiggler
For the planar wiggler the field strength on axis of the fundamental can be written as
[2]:
Here U,(x) = ire~,
r2-r,
2B,.
sin(er/N)
(jr11)
(7r/N)
2r, is the gap width between the lower and the upper rows of magnets,
B,
=B --
{U,(k.ri)
-
U,(k.r
2
)}
is the thickness of the magnets, e is the filling factor due to the gap between adjacent
magnets and N is the number of magnets per period (see Fig. 4). In most practical planar
wiggler designs constructed to date, N = 4.
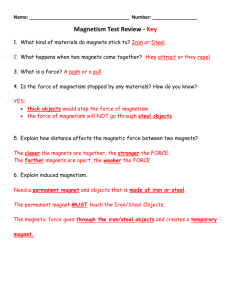
In Fig. 5 U,(x) is compared to U(z) the characteristic function of the helical wiggler.
As we can see, both behave almost identically in the region of interest. By comparing
eq.(9) and eq.(11) we conclude that a helical wiggler with the same periodicity
4.,
the
same magnet thickness r 2 - r, as a planar wiggler, and with inner diameter equal to the
gap between the two magnet rows of the planar wiggler, will yield approximately the same
field strength on axis.
The lowest harmonic term for the planar wiggler is N + 1 (5 "' for N = 4). Using the
expression for the field of the planar wiggler [2] we find:
BN+ 1 _ sin[(N + 1)?/N]
I U,[(N + 1)kwr1] - U,[(N + 1)kr2 Bwp
sin(e/N)
N+1
U,(kwr1)-U,(kwr2)
6
(12)
Since typically e ~~1, the value of the first factor on the right side of eq.(12) is also of
the order of unity. Then, by comparing eq.(12) with eq.(10), it is seen that for similar
design parameters, a helical wiggler with more than six grooves will have a lower harmonic
content than a planar wiggler with N = 4.
6. A wiggler with azimuthally oriented magnets
When the magnets in the wiggler are rotated by 90 degrees, we obtain again a helical
arrangement as shown in Fig. 6. In order to solve for this configuration, the magnets are
again assumed to be of trapezoidal cross-section with constant azimuthal magnetization:
M
= iM(e,
z) for r, < r
< r2.
M(O, z) is given by eq.(7). In this case the effective
magnetic charge density is (see appendix): p,. =
,
-
while
surface term in eq.(A4)
vanishes. Following the same procedure, as applied in section 3 for the radially magnetized
configuration, we find for the azimuthally magnetized configuration:
B=
4B
7rk,1, n
2
'(
2
K,(x)d}
where x1 = nkwri, X2 = nkr
2,
sin(en'ir/N)n~'
('I/N)
n V{I(nkr)co8[n'O+nk,.z}}
)W
7
(13)
r < r1 and where the same selection rules as for eq.(7)
apply here also.
For the field strength on axis we get:
B. = -- '-{Ko(k.r ) - Ko(kr2)
K
)
7r/N)
(if/N)
(14)
Comparing eq.(9) and eq.(14), we see that since xK 1 (x) is a monotonically decreasing
function, the radial configuration will always yield a larger field strength than the azimuthal
one for the same set of design parameters B,, 1W , ri,
r2 ,
N and c. As an example we take:
B, = 9kG, L,. = 9.6cm, r, = 1.0cm, r2 = 1.4cm, N = 12 and e = .64. We get for the
radial case B,. = 1.28kG but only 0.86kG for the azimuthal case.
The azimuthal configuration provides a means to vary the wiggler strength while
using the same structure and magnets. In fact, one can envisage a scheme in which all the
magnets are rotated in their grooves by the same arbitrary angle other than 90*, thereby
changing continuosly the wiggler strength. However, it should be noted that this cannot
7
be used in a given wiggler, as a means of tapering the field strength. This is because the
phase shift associated with the rotation will distort the helical field shape.
7. A hybrid samarium-cobalt-iron wiggler configuration
The field strength of the radially magnetized wiggler can be enhanced by inserting
the whole wiggler inside a soft iron tube (Fig. 7). If the permeability of the tube is very
large (y -+ oo), the boundary condition at the tube surface is
(r = a, 0, z) = 0, and the
outer tube radius plays no role. 4m is the magnetic scalar potential and a is the internal
radius of the soft iron tube. A magnet, oriented perpendicular to a surface on which the
potential vanishes, has an image pointing in the same direction, thus increasing the field
strength.
In order to calculate the field strength of this configuration, we have to replace the
term
_ , in eq.(A4) by the Green's function of a point charge at r' inside a hollow
cylinder of radius a. Using standard methods [5], we find for this Green's function:
G (r, r') =
27r2
E (2 - &5mo)cos[m(6- 0')]
cos[k(z - z')jg]m(k, r, r')dk
(15a)
where for r < r':
K,, (ka)
9M(k, r, r') = 47r{Km(ckr') - Im(ka)Im (kr')}Im(kr)
(15b)
Proceeding as in section 3, the expression for the field is found to be similar to eq.(8) where
the integral
nk, 1j and
f
X2
rK',(x)dz is replaced by f[zK
=
()
-
I(x)dx,
=
nk~,r2 . This leads to an expression for the field strength on axis similar
to eq.(9), with U(x) replaced by:
Ui(x) = xKl(x) + Ko( ) -
K 1 (kca)
{
Ii(ka)
(Ii(x)
- Io(x)},
z = k.r
(16)
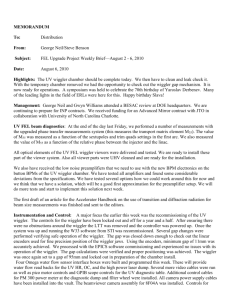
From eq.(16) it is clear that he effect of the soft iron is maximal when a is as small
as possible i.e. a = r2. As a becones larger, U; and correspondingly the field strength B.,
approach the values obtained wit no iron cover. The calculated dependence of B, on a
8
is shown in Fig. 8 for two wigglers. As we can see, in one case the field strength can be
enhanced by as much as 50%.
Fig. 8 suggests that amplitude taper for the purpose of efficiency enhancement [3],
can be easily accomplished by varying a. This method seems convenient especially since
it does not involve variation of the strengths, positions or orientations of the bar magnets
themselves. Thus, it is very well suited, for example, for experimental optimization of the
taper profile.
8. Measurements
A 12 channel system was machined to serve as a prototype for testing some of the
configurations described in this paper. Samarium-cobalt bar magnets with B,. = 9kG,
cross sectional area of 0.4cm x 0.4cm and length I = 1,/2 were used. The variation of the
strengh of the magnets as specified by the manufacturer is ::1.5%, while the variation of
the direction of the magnetization (the easy axis) is ±3%. The aluminum tube is grooved
so that r1 = 1.0cm and r2 = 1.4cm. For N = 12, the corresponding filling factor (eq.3) is
F,.ei = 0.64.
Results of 4 tested wigglers are summarized in Table 1.
The first two cases are
wigglers with radially oriented bar magnets but differing in their periodicity. The third
case is a wiggler with azimuthally oriented magnets. The forth case is for a radially
oriented magnet wiggler inserted in a tube of "1010" steel (p/po ;: 5000). The magnetic
field measurements were performed with a transverse Hall probe gaussmeter (Bell 610),
mounted on a mechanical stage and motor driven along the wiggler axis. The discrepency
between calculated and measured values of B, is seen to be about 10% for all four cases.
This can be attributed in part to the semiempirical filling factor F,m,, for the square cross
sectional bar magnets and in part to the fact that in our calculations we assumed the
permeability of the REC magnets to be equal to that of vacuum, while in reality it is
higher by a few percent [2].
Measured field traces of the first wiggler of Table 1, made from an x-y recorder chart,
are shown in Figure 9. Figure 9(a) illustrates the fields over the central 2-period length of
9
the 5-period long wiggler. Figure 9(b) shows the wiggler behavior at one of its ends. Each
of the seven traces corresponds to a different azimuthal orientation of the Hall probe made
in angular steps of 30*. Similar measurements, performed for the three other wigglers, also
show very smooth field profiles with uniform amplitude and appropriate phase relations
between successive scans.
The r.m.s variations of the field amplitude (see Table 1) were calculated by sampling
the peaks of all the traces for each wiggler. It should be emphasized that no attempt was
made to sort or arrange the magnets in order to minimize errors. We expect that using
sorting procedures, the r.m.s error may well be reduced by about one order in magnitude.
The relative amplitude of the lowest harmonics on-axis, B
1/Bw,
was calculated from
eq.(10) for the first and second cases in Table 1. For the last two cases, equivalent equations
were used, with U(z) being replaced by Ko(x) in the third case and by U(x) in the forth
case.
Figure 9(c) shows the field profile when one bar magnet at the center of the wiggler is
replaced by a nonmagnetic spacer. Although the local field amplitude drops by as much as
14.5% as a result of this rather large perturbation, the field profile remains quiet smooth.
This illustrates the smoothing effect due to the large number of ovelapping magnets per
period.
When the wiggler with the missing magnet is inserted inside the soft iron tube, the
perturbation (14.5%) remains the same as in the absence of the iron tube. In another test,
one magnet in the center of the wiggler was rotated by 90*. In that case the field profiles
remained smooth but the drops in the local field amplitude were 15.5% and 20% for the
wigglers with and without soft iron cover, respectively. These later results indicate thit
a soft iron cover may improve the field quality as far as variations due to errors in the
direction of magnetization are concerned. A magnet whose magnetization is not properly
directed, will have an azimuthal component of magnetization in addition to the radial component. As dicussed in section 7, a cylindrical cover of soft iron will effectively enhance a
radially directed magnetization while reducing the strength of azimuthally directed magnetization. Thus, the net result will be a magnetization vector aligned more radially. As a
result, a soft iron cover is expected to reduce field inhomogeneities, caused by errors in the
10
direction of the easy axis, of REC magnet helical wigglers, in addition to yielding higher
wiggler field strengths. Thus, the action of the iron in this case is somewhat similar to the
use of iron in planar REC wigglers [6}.
9. Adiabatic amplitude tapering
In most free electron laser application, the amplitude of the first few wiggler periods
has to be tapered smoothly from zero to the maximum value, to enable adiabatic electron
beam injection. When a tube made of permeable material is inserted inside the wiggler, it
will tend to screen the magnetic field. The magnitude of this effect will depend on the yA of
the material and the wall thickness of the tube. If the tube is thick enough, the field inside
will be zero. Thus, a tube with a tapered wall thickness is a simple method to taper the
wiggler field entrance. As in the case of the taper of the outside soft iron tube, proposed
in section 7 for the purpose of efficiency enhancement, the present technique likewise does
not involve varying the bar magnet distribution.
This method was tried with one of our tested wigglers (the first case in Table 1). The
available material was "1010" steel which has a high u (:
5000) and a saturation field of
a 16kG. The tube, 33.8cm long, was machined to an outside diameter of 1.59cm to fit
inside the wiggler. The inside of the tube was divided into 7 straight sections, each 1/2
(4.8cm) long. Different drills, in steps of 1/64 inch, were used for each section. The inside
diameter of the first section was 1.27cm, and that of the last one was 1.51cm. Thus, the
tube wall thickness varied from 0.16cm at its thickest end to 0.04cm at its thinnest end.
The measured field on axis over a taper length of 3.5 periods is shown in Fig. 9. Each
of the traces corresponds to a different azimuthal orientation of the Hall probe, made in
steps of 30*. As can be seen, the field profile is smooth and undistored except for one
point, which corresponds to the far end of the tapered tube. This may be the result of
saturation at the thin edge of the tube. The tube wall thickness is 0.04cm at this point.
The use of material with a higher saturation field and a lower ys may prevent this problem
and it may also allow better control in machining the taper.
11
10. Conclusions
In this paper we present a detailed study of the novel 'bifilar' REC helical wiggler first
described by us in reference 1. Additional schemes, such as the azimuthally oriented magnet
wiggler and the soft iron hybrid wiggler, are introduced. These configurations as well as
the original one [1] are solved analytically, including the effects of the discreteness of the
magnets. The existance of analytical formulas for the field strengths and field harmonics
facilitates design procedure. Our analysis shows that the field strength and quality of the
REC helical wiggler is expected to be comparable or better than the equivalent planar
wiggler (Halbach configuration [2]).
Some of the ideas were tested experimentally on
prototype wigglers and the results validate these concepts.
A simple way to taper the
wiggler entrance for adiabatic beam injection, was also tested successfully.
A promising configuration, in terms of field strength and quality and in terms of
versatility, seems to be the soft iron hybrid wiggler, with the possibility of tapering the
external soft iron tube for efficiency enhancement and with an adiabatic electron beam
injection provided by an internal tapered soft iron tube.
Heretofore all our experimental studies were made on a short (5 period) prototype
system.
We are in the process of designing similar permanent magnet helical wigglers
to spin up relativistic electron beams on a cyclotrom maser (CARM) experiment to be
performed at M.I.T at a frequency of 140 GHz [7]. Although all of our experimental studies
were made on helical wigglers with periodicities of 4.6 and 9.6cm, using available magnets
in our laboratory, we do not see any difficulties of constructing high quality permanent
magnet helical wigglers in the more conventional range with periods of 2-4cm.
Appendix
Properties of REC permanent magnets
Throughout this work we use the simplifying assumptions [2]:
B11 = o(HII + M)
(A)
where HII is in the direction of the magnetization (the easy axis), while H 1 is perpendicular
12
to it. The magnetization M is equal to B,/po, where B,. is the remanent field. The above
assumptions are a good approximation to the behavior of REC magnets over a large range
of applied field strength. As a consequence of these assumptions, linear superposition of
vacuum fields is applicable, and the magnetization plays the role of an external source
distribution. Maxwell's equations can be solved either for H or for B. If one works with
H, then the magnetization contributes an effective charge density and the equations are:
Vx H =0,
VH=-M=pm
(A2)
H can be derived form a magnetic scalar potential:
V2
H =-V!m,
'
V.M
(A3)
.
The solution to eq.(A3) is given by [8]:
1 ifM
47r
r
-ds'
V- M
-rl
r - rl-
vl(4
de
(A4)
The second integral is over the volume of the magnetic material while the first one is over
its surface. The term
_ , is the Green's function of free-space for a point charge at r'.
In cylindrical coordinates (r,0, z), it can be written as [9J:
r -7 1 = ;E(2
cos[k(z - z')]Km(kr')Im(kr)dk
- bm)cos[m(O -0)]
(A5)
for the region r < r'.
When working with B, the magnetization contributes an effecive current density:
V- B = 0,
V x B =pOV x M = IOJm,
(A6)
Sometimes, V-M = 0 or V x M = 0 inside the magnetic material. It is then convenient
to work with the effective surface charge density an (for H) or with the effective surface
current density J. (for B) at the boundary between the magnetic material and free space.
The boundary conditions for H are:
iix(H 2 -H
1
)=0,
h- (H 2 -HI)=,hM=om
13
.
(A7)
The boundary conditions for B are:
. - (B 2 - B1 ) = 0,
h x (B 2 - B) = -poh x M =poJ.
.
(A8)
The magnetic material is in region 1, while region 2 is free space and the unit vector i
points from region 1 to region 2. If the surface under consideration is the interface between
two REC magnets of identical magnetization and opposite orientation, the source terms
in eq.(A7) or eq.(A8) add so that o, or J, have to be multiplied by a factor of two.
14
References
1. G. Bekefi and J. Ashkenazy, "PermanentMagnet Helical Wiggler for Free-Electron
Laser and Cyclotron Maser Applications", Appi. Phys. Lett. 51 (9), 31 August 1987,
pp. 700-702.
2. K. Halbach, "Physicaland Optical Propertiesof Rare Earth Cobalt Magnets", Nucl.
Instrum. Methods 187 (1981), pp. 109-117.
3. N.M. Kroll, P.L. Morton and M.N. Rosenbluth, "Free-ElectronLasers with Variable
Parameter Wigglers", IEEE J. Quantum Elec., Vol. QE-17, No. 8, August 1981, pp.
1436-1468.
4. J. Fajan, "End effects of a bifilar magnetic wiggler", J. Appl. Phys. 55 (1), 1 January
1984.
5. J.D. Jackson, "ClasicalElectrodynamics", Wiley, New-York,
2 nd
edition, 1975, sect.
3.11.
6. K. Halbach, "PermanentMagnet Undulators",Proceedings of the 1982 Bendor FEL
Conf., Journal de Physique 44, p. cl-211 (1983).
7. K.D. Pendergast, B.G. Danly, R.J. Temkin and T.M. Tran, "Design of a High Power
140 GHz CARM Amplifier", 12t
Inter. Conf. on Infrared and MM Waves, Dec.
14-18, 1987, Orlando, Florida.
8. W.K.H. Panofsky and M. Philips, "ClassicalElectricity and Magnetism", AddisonWesley, 2 "d edition, 1969, p. 141.
9. W.R Smyth, "Staticand Dynamics Electricity", McGraw-Hill, New-York, 3 'd edition,
1968, p. 204.
15
Table 1. A comparison of four tested wigglers with twelve axial grooves (N = 12).
period orientation
41'
of magnets
9.6 cm
radial
4.6 cm
9.6 cm
B0
soft-iron
rms variations
calc.
meas.
measured
calculated
no
1.28kG
1.16kG
0.9%
0.001
radial
no
1.05kG
0.93kG
1.2%
5 -10-
azimuthal
no
0.86kG
0.78kG
1%
10-4
yes
1.75kG
1.60kG
0.7%
5.-10-4
9.6 cm radial
16
Figure Captions
Fig. 1. The 'bifilar' REC helical wiggler for radially oriented magnets, showing the placement
of magnets in the grooved nonmagnetic (aluminum) cylinder.
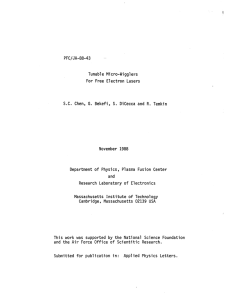
Fig. 2. Schematic of a REC helical wiggler with radially oriented bar magnets: (a) crosssectional view; (b) side-view after unrolling the cylinder (figure (a) only is to scale).
Fig. 3. Bar magnets with trapezoidal cross-sectional area, assumed in the analytical calculation; e is the filling factor.
Fig. 4. 2D cross-section of planar REC wiggler [2].
Fig. 5. A comparison between the characteristic functions of the helical wiggler U(x) =
xK,(x) + Ko(x) and the planar wiggler U,(z) = 7re-z (see text).
Fig. 6. Schematic of a REC helical wiggler with azimuthally oriented bar magnets: (a)
cross-sectional view; (b) side-view after unrolling the cylinder.
Fig. 7. Schematic of a hybrid wiggler: tross-sectional view of a REC helical wiggler inside a
soft iron tube.
Fig. 8. Calculated magnetic field amplitude for two hybrid REC helical wigglers as a function
of the internal radius of the soft iron tube, showing substantial field enhancement for
small a.
Fig. 9. Magnetic field amplitude measurements, on the first wiggler in Table 1, as a function
of axial distance for different Hall probe rotations,
e=
0', 30*,60*, ..., 180*: (a) at
wiggler center; (b) at wiggler end; (c) after removal of 1 bar magnet; B,. = 9kG,
= 9.6cm, r, = 1.0cm, r2 = 1.4cm, N = 12 and F.,, = 0.64.
Fig. 10. Amplitude tapering showing magnetic field measurements as a function of axial distance for different Hall probe rotations,
e=
0,300,60, ..., 180* when a soft iron
tube, 3.5 wiggler periods long with tapered wall thickness, is inserted inside the wiggler; B,. = 9kG, L. = 9.6cm, r1 = 1.0cm, r2 = 1.4cm, N = 12 and Fem, = 0.64.
17
1-4
U)
U)
U)
zn
* *.'
* .U).
(a
A
I.
I
t
I
N
A
V
S
N
S
f
I
'N
N
NJ
s
I
S
NI
(b)
(b)
Fig. 2.
A..-Us;;.-
'R.1.9
71197/
r2
Ls
r
Fig. 3.
A ex....
-a
1n.i..
U
V
CLw
Lfl
3.5
U (x)
3.0
2.5
2.0UPx
1.5 -
.0-
0.5
0.01
0.0
0.5
1.0
1.5
x
2.0
2.5
3.0
Fig. 5
Ashkenazy and Bekefi
0.5cm
( a)
I
I
I
-tw,
I 41*1*
I * 141*1*
I *. I 4 I
*
*
(b)
Fig. 6.
a~it.--
-. j nI..-:
Ile 010,
.000
r2
a
So t iron
Fig. 7.
Ashkenazv and Bekefi
2.0
Br
r,
r2
1.8-
Fsemi
9kG
1.0 cm
1.4cm
0.64
1.6Bw
w9C
(kG)
8=9.6cm
4A--
1.41
12--
1.0
TI.5
2
2.0
2.5
3.0
3.5
4.0
a(cm)
Fig. &
Ashkenazy and Bekefi
(a)
0
(kG)
(b)
0
20
Z(cm)
Fig. 9.
I
I
i
I
-0
En
cv0
Sil~3AiV-18
O