CONTROL-THEORY HEURISTICS FOR IMPROVING Cuneyt M. Ozveren
advertisement

CONTROL-THEORY HEURISTICS FOR IMPROVING
THE BEHAVIOR OF ECONOMIC MODELS
John D. Sterman
Cuneyt M. Ozveren
October, 1988
WP # 2074-88
Control-Theory Heuristics for
Improving the Behavior of Economic Models
CUneyt M.
zveren
John D. Sterman
Abstract
The usefulness of control
simulations is examined.
theory techniques in economic
A model of the capital investment
accelerator is used for illustration.
It is shown that behavior
approaching optimality can be achieved in a highly nonlinear system
with simple heuristics based on linearization and constant state
feedback with an appropriate choice of desired closed-loop poles.
Applications to real
life situations are discussed and suggestions
are made for approaching potential problems using similar control
theory techniques.
September 1988
Laboratory for Information Decision Systems, MIT, Cambridge MA
02139
*Sloan
School of Management, MIT, Cambridge MA 02139
0
Introduction
One can approach a system dynamics problem from two extreme
points of view:
mathematical and intuitive.
provides global knowledge of
simple models.
Thus,
Mathematical analysis
the solutions but is only feasible in
it is very hard to analyze large, realistic
models mathematically.
On the other hand, with the intuitive
approach, one can investigate more comprehensive and realistic
models, but it is all too easy to become lost in simulation and
trial and error in designing policies to improve performance.
We
seek to answer several questions:
1.
How useful are the techniques of modern control
theory in
simulation models of social systems?
2.
Can "approximately optimal" policies be designed which provide
significant performance improvement relative to the original
policies of the decisionmakers? By "approximately optimal"
is
meant a set of policies based on heuristic methods rather than
the closed-form solution of the problem,
since such analytic
solutions are generally impossible to determine in the high
order, nonlinear systems typically of concern in system
dynamics modelling.
3.
How different are the improved and original policies?
That is,
are the improved rules consistent with the likely availability
of information and bounded rationality of real managers?
The goal of this paper is to motivate the heuristic use of some
1
III
mathematical
outlined as
1.
tools
to aid the systems analyst.
The approach can be
follows:
Start from
the full
simulation model portraying the problem of
interest.
2.
Analyze
the model
linearization,
of
3.
formally, using decoupling,
etc.,
where appropriate
model
reduction,
to decrease the burden
the mathematical analysis.
Design an appropriate controller
(policies for improved
performance).
4.
Project
the results back to
the original
model and test
robustness of the new policies in the full
We assume
that
system.
1 is given and concentrate on 2,
paper complements previous applications of control
design in social
and corporate systems
the
3, and 4.
The
theory to policy
(e.g. Mohapatra and Sharma
1985, Coyle 1985, Kivijarvi and Tuominen 1986) by applying formal
methods
to a nonlinear model with complex dynamics.
existence of
the
the
showing how people actually manage
experimental results
system provides a means
Further,
for directly assessing
improvements which may be obtained through
the performance
the use of control
techniques.
We next describe some of
the basic mathematical
above approach is applied to Sterman's
Kondratiev cycle or
general
long wave.
techniques applicable
The
of the
The particular example illustrates
to a variety of situations such as
business cycles (Mass 1975, Lyneis
stabilization (Meadows 1969),
(1985) model
tools.
1980),
commodity price
market growth (Forrester
2
1968) and
others.
Although this paper
is mostly heuristic, we hope to
motivate the need for rigorous analysis based on the outlined
method.
The last section summarizes our results and makes
recommendations for further analysis.
Mathematical Tools
Linearization is the most common tool for formal analysis of
nonlinear models.
A model of the form
x(t) = f(x(t)) + g(u(t))
(1)
where x is the vector of states, u is the vector of inputs in the
model and f(-), g(-) state and input functions, respectively, could
be linearized around a nominal trajectory x n(t) using the Jacobian
matrices
F
=
[fi,j], 1,3
G= [gi,j],
~1,3fi,. = afi(x)/ax.
i
3
gij
=
(2.a)
gi(u)/cu
(2.b)
Then the linearized model
bx(t) = F6x(t) + Gu(t)
(3)
describes deviations from the nominal trajectory.
The actual
trajectory x(t) = x (t)+bx(t) is driven by the input
u(t)
= u (t)+bu(t) where f(x n(t))+g(un(t))
0.
This approximation
is good for "slowly varying" nominal trajectories.
analyzed using modern control
The model can be
theory (Guckenheimer and Holmes 1983;
for "slowly varying" see Vidyasagar 1978).
It should always be remembered that linearization only provides
information about the local region of phase space, and is not a
3
III
reliable guide
to global
nonlinearities
is
saturation,
this case,
the class
bang-bang,
discontinuous,
dynamics.
A
special class of
of piecewise
roundoff etc.
and therefore
linear
functions,
such as
Their derivatives are
the Jacobian matrix is undefined.
In
the analysis can be performed for different regions where
the derivatives of these nonlinearities are defined.
Once the
of control
linearized model
can be applied.
placement using full
state
(3)
is constructed,
various methods
The method used in this paper is pole
feedback (Kailath 1980).
In essence, a
weighted sum of each state
is fed back to
the system as
The method
these weights,
H,
given set
is to calculate
of closed
the system (3)
that
loop poles (i.e.
is controllable,
in order
the input.
to achieve a
the eigenvalues of F+GH).
If
then a matrix H can be chosen such
the eigenvalues of F+GH are as desired.
The input
u(t)
is
picked as:
6u(t) = Hx(t)
(4)
The closed loop system then becomes:
6x(t) = (F+GH)6x(t)
and has
(5)
the desired closed loop poles.
to sustain the nominal
trajectory.
The nominal
For example,
input is picked
the nominal
trajectory might be given by the equilibrium of the
system, which
may be changing with exogeneous conditions.
To achieve an approximately optimal
2 poles,
one rule of
thumb is
closed loop system such that
equal
response for a system with
to select a pair of poles for
the
these poles are complex conjugates with
magnitude of real and imaginary parts and negative real part.
The response
to a step input exhibits a
4
slight overshoot and is
optimal
in the sense of minimum overshoot and settling time (Roberge
1975).
The distance from the poles to the origin is a trade-off
between overshoot and settling time.
An important aspect of any control design is robustness.
We
consider robustness by perturbation of the control parameters and by
introducing uncertainty in the states.
A Model of the Kondratiev Cycle
Various models of
the Kondratiev cycle or long wave have been
developed to analyze recent economic difficulties (Rasmussen,
Mosekilde, and Sterman 1985; Sterman 1985; Sterman 1986; Vasko
1987).
model
This paper adopts the model of Sterman 1985.
The Kondratiev
is chosen since it is a nonlinear system which exhibits
complex dynamics, yet its structure is simple enough to allow for a
considerable amount of mathematical analysis to be done by hand to
illustrate the proposed techniques.
systems dynamics literature.
It is also well known in the
The model has also been converted into
a simulation game, Strategem-2 (Sterman and Meadows 1985).
Strategem-2 provides a simulated economy in which the human
decisionmakers replace the decision rule of the original model.
Thus the game constitutes a laboratory for experimental testing of
the model.
Strategem-2 motivates the design of an "optimal"
controller to "play" the game as we can compare the behavior of
actual managers to the "optimal" response, thus providing a rough
measure of the value of improved performance through formal
analysis.
5
III
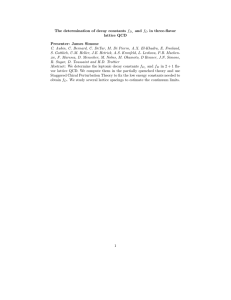
The long-wave model portrays the process governing capital
investment in the aggregate economy.
The capital producing sector
strives to satisfy the demand for capital of
sector as well as its own capital needs.
the goods producing
The model represents the
capital "self-ordering" feedbacks created by the fact that capital
is an input to its own production.
This dependency implies that the
total demand for capital can only be filled when there is sufficient
capacity, but also that the capacity of the capital-producing sector
can only be increased by first ordering additional capacity and
adding to the demand.
Intuitively, such a positive feedback must
destabilize the adjustment of capital producers to shocks, and in
fact,
the model typically exhibits large-amplitude limit cycles.
It
can also generate chaotic behavior, where no periodicity can be
attributed to the model (Sterman 1988b).
In the experimental
version, subjects play the role of managers for the capital
producing sector and strive to balance the supply and demand for
capital.
Subjects seek to minimize their costs or "score" during
each trial.
The score is the average absolute deviation between
supply (production capacity, PC) and demand (desired production, DP)
over the T periods of the game: S = h[DPt-PCtI.
When presented
with an unanticipated step input in demand, a sample of about 50
subjects produced an average score of more than 500 (Sterman 1987,
1988a).
The optimal score for the same situation is 19.1
The poor
1The optimal score was determined by grid search of the score space
as a function of successive decisions.
The optimal strategy
presumes that the step in demand is unanticipated, consistent with
6
performance of
the
subjects shows
controller may offer substantial
The states
the goods sector
capital
improvements
in the model are capital
placed by the capital
by
that even an approximately optimal
sector
(BGS).
(BKS),
The
(K),
follows
(Figure
K1
K~
~
the backlog of orders
and the backlog of orders placed
inputs are new orders from the
sector NKS (specified by the player),
goods sector NGS (exogenous).
in performance.
The model
and new orders of the
can be summarized as
1):
r
BKS
K
NCAT
LS
BK
-
BGS
BKS FD
NCAT
[D1
+
NKS
NCAT FDS
(6.a)
NGS
FDS = Fraction of Demand Satisfied
Min(Desired Production,Capacity)
Desired Production
BKS + BGS(6c)
NCAT
Desired Production =
Capacity =
where
K
COR
the normal
of capital
(ALC),
the experiment
the same
(6.d)
capital acquisition
and capital
in this paper,
COR = 2 are used;
Also,
to
time
output ratio
(NCAT), average
lifetime
(COR) are constants.
the values NCAT = 2,
For
ALC = 20 and
these are the values used in the Strategem-2 game.
time
step (2 years),
and score function, as
results
(6b)
the game.
simulation length (70 years),
the game, were used
in order
to compare our
The acquisition lag and capital/output ratio
the information available
to
the subjects.
7
II
were deliberately set equal
the STRATEGEM-2 game.
to
the
time step
In the original model
based on econometric evidence and the
integration error was not
significant.
differential equation versions
to facilitate play in
the parameters were
time step reduced so that
The difference and
of the model
produce the same types
of behavior and respond to parameter changes in the same fashion.
Linearizat
ion:
The only nonlinearity requiring piecewise analysis arises from
the fraction of demand satisfied,
can only fully satisfy
equal
to capacity.
production.
FDS.
The capital-producing sector
the demand when that demand is
FDS equals
less
than or
100% when capacity exceeds desired
As desired production rises above capacity, FDS falls,
constraining the growth of
two distinct regimes:
capital
itself.
The model operates
in
FDS = 1 (capacity exceeds demand), and FDS < 1
(insufficient capacity).
Considering each regime in turn,
linearization of Equation (6)
yields:
1. For FDS = 1,
r6K
6K
{SK
6BKS
[BGS
= F2
6BKS
+
(7)
G2
tBGS
8
-1/ALC
where F2=
0
1/NCAT
0
-1/NCAT
0
0
and G 2 =
.
-1/NCAT
0
2. For FDS < 1
6K
6K
[6BKS
* 1 6BKS
= F1
6BGS
where F1
6NKS
+ G
~~~~6NGSJ
(8)
6BGS
is
KxBGS/COR(BKS+BGS) 2 -KxBKS/COR(BKS+BGS) 2
BKS/COR(BKS+BGS)-1/ALC
-BKS/COR(BKS+BGS) -KxBGS/COR(BKS+BGS) 2
KxBGS/COR(BKS+BGS) 2 -KxBKS/COR(BKS+BGS) 2
-BGS/COR(BKS+BGS)
GI
=
0
KxBKS/COR(BKS+BGS) 2
and X denotes the value of state X at the operating
0 1
point.
Let
p = (K/COR)/(BKS+BGS).
Note that q = NCATxFDS where FDS
is the fraction of demand satisfied at the operating point.
let r = BKS+BGS and note that
= NCATxP,
production at the operating point.
BKS/CORx
F1
=
For FDS=l,
-
1/ALC
is the desired
Then, we have
xBGS/T -xBKS/I
-BKS/CORxr
-pxBGS/r
-BGS/CORxr
VxBGS/
the entire model
is highly nonlinear.
where
Also,
pxBKS/r
-xBKS/r
is linear, and for FDS<1,
the model
Note the following observations from the
analysis of the above models:
9
III
1.
FDS = 1
a. The system is
stable with time constants ALC
lifetime of capital, and NCAT (normal
delivered within the normal capital
capital
stock depreciates with time constant ALC.
stable.
sector
the goods
gets all
1
The eigenvalues are 0,
-,
and BKS/CORxw-1/ALC.
The Jacobian matrix has a zero eigenvalue, which
that
and thus
it desires,
BGS is also decoupled from K and BKS.
is not controllable.
FDS (
BGS is uncontrollable
In other words, K can be controlled by NKS, but as
long as FDS=1,
a.
orders to be
acquisition time, and
K and BKS are controllable via NKS.
but
2.
capital acquisition
In this regime, excess capacity permits all
time):
b.
(average
higher order terms
important.
Thus, no
the Jacobian matrix.
to be safer
seems
ignored by the
implies
linearization are
stability conditions can be inferred from
Due
to its highly nonlinear nature,
to keep the system away from this
it
region
whenever possible.
b. The
is
linearized
to design a controller which stabilizes
region, or better
into
still, gets the
the goal
the system in this
system out of
this region
the stable region where FDS=1.
An interesting characteristic of
equilibrium point, which
for a given NGS,
making
Therefore,
system is controllable.
this model
is
that
lets us calculate the nominal
is exactly at
the boundary of
the system harder to control.
10
trajectory
these two
Specifically,
at
the
regions,
the
equilibrium,
FDS =
K
(9.a)
= ALCxCOR
NGS
ALC-COR x NGS
n
BKS
NKS
BGS
where X
1
n
(9.b)
n
NCAT xCOR
= NCATCOR x
NGS
ALC-COR X G
(9.c)
n
COR
= ALC-COR
(9.d)
x NGS
x NGS
= NCAT x NGS
n
denotes
Thus,
(9.e)
the nominal
control
trajectory for X.
to sustain the nominal
COR
be chosen as ALCOR RxNGS +
-
trajectory given NGS, NKS should
NKS where 6NKS is chosen in order
the deviations from the nominal
to
trajectory.
Controller Design:
The model,
controllers
full
implemented in STELLA,
(one for each region),
state feedback.
the capital
instant of
to perform pole placement using
The controller determines the new orders of
sector NKS and is designed to calculate H
the eigenvalues of Fi+GCiH.
time such that
for each region,
i = 1, 2.
equilibrium rate of capital
of
was extended to support two
the consumer sector.
The nominal
1
at every
are as desired,
trajectory is given by the
sector orders given the current orders
Then,
the resulting input is:
5K
NKS = ALCCORXNGS + H
ALC-COR
6BKS
= NKS
~~n
+ 6NKS.
i
(10)
6BGS
Note that as
long as
the desired poles are chosen to be nonzero and
11
III
stable,
the
trajectories will be
nominal
trajectories.
usually
linearized around the equilibrium point and the poles are
set accordingly.
stable around
In the control
Here,
we place
the slowly varying
literature,
the system is
the poles for all
the system
(except perhaps at a few number of points where controllability is
lost).
Although this
is not backed up by rigorous results,
merits further research in view of
the successful
it
results shown
below.
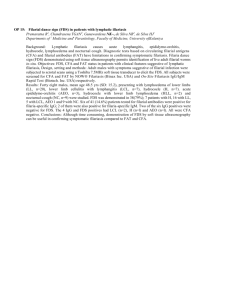
Figure 2
shows a policy structure diagram of
controller (equations for
Appendix).
First,
current state of
entries of H
1
the controller are supplied in the
H1 and H2 are calculated on the basis of the
the system and the desired closed loop poles.
were found such that
loop matrix (determinant
polynomial
((X-desired pole 1)(X-desired pole 2)
and 6NKS2
are calculated as
H1 and H2
respectively,
of
I-(F+GHi))
the weighted sum,
is
the desired
etc.).
Then,
6NKS
by multiplication via
the current value of NGS and
This stabilizes the dynamics of the error modes of
the closed loop system and
thus drives
the states
the system is more robust
to
since
the steady
the error will
state values.
Thus,
go
the response will not be very sensitive to
to zero and
of
of the deviation from the nominal
which are determined by
Equation (9).
The
the characteristic polynomial
the closed
trajectory,
the overall
perturbations in H 1
and H2 .
Finally,
6NKS 1
depending on the value of FDS, and NKS
or
NKS 2
is chosen
is added to calculate NKS.
n
Three poles in the region FDS < 1 were placed in the left half
plane on the circumference of a circle centered at
12
the origin.
One
pole was placed on the real axis with a complex conjugate pair with
equal
real and imaginary parts.
The radius of the circle determines
a trade-off between overshoot and settling time (the larger the
radius,
the more overshoot and faster settling).
In the region FDS
= 1, two poles were placed on the real axis in the left half plane,
both at
the same location.
Their distance from the origin
determines the settling time in this region.
Positive shocks to NGS from equilibrium put the system in the
unstable, nonlinear region FDS
1.
The controller is designed to
move the system into the stable region in an "optimal"
quickly and with minimum overshoot.
fashion -
In the region FDS = 1, the
system is expected to settle at the equilibrium in an overdamped
way,
thus providing the overall desired response.
NGS put the system in the region FDS = 1.
Negative jumps in
The response will be
overdamped in that case.
In intuitive terms,
region FDS
increasing the speed of adjustment in the
1 may result in building the capital stock too high,
and thus degrading performance by increasing the score.
the speed when FDS
1 may cause
with inadequate investment
raising the score.
Decreasing
the system to linger in this region
to escape, also degrading performance by
Increasing the speed in the region FDS = 1 may
cause the system to reenter the region FDS
time intervals used in the Strategem-2 game.
1 due to the discrete
This is not expected
to cause any problems since capital will be bounced back up again,
but may cause small amplitude (probably damped) oscillations.
Decreasing the speed in this region may cause slow settling to the
equilibrium (overconservative response),
13
and thus increase the
III
score.
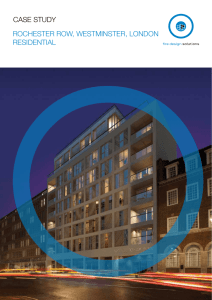
Experimental Results:
for pole
Various speeds were tried, and simulation results
locations -0.38,
illustrated in Figure 3.
DesiredK =
1, and -1,
-0.27±0.27j for FDS
for FDS = 1 are
desired capital
In the figure,
the
sector input supports
The capital
(BKS+BGS)/NCAT.
-1
intuition that a positive jump in the goods sector demand is
input NKS such
followed by an amplified positive jump in the control
the share of
that
production is
the capital sector demand in the desired
increased enough to
the desired production
input drops
close
to zero
for a while
to its equilibrium value.
about
10 years.
To
10%
FDS
the goods sector.
The score
investigate
for
robustness
in the response, and
for the
the
initial
Capital
jump in the
falls to 80%, but recovers
in
the simulation is 15.2'3
the speed
in both directions independently.
changes
Later,
to compensate for the
the desired response, while compensating
backlog of
and supply
the region FDS = 1).
(bounced to
overdemand, and finally settles
shows
increase the capital
inputs were perturbed by
This resulted in negligible
the increase
in the average score per
2
In the Strategem-2 game, all quantities are rounded
10 units
to
simplify the decisionmaking task of
simulation analyzed here permits
values.
As a result,
the optimal
3
Compare
score of
the behavior
the states
to the nearest
the subjects.
The
to take continuous
the score in the simulation can be less than
19 in
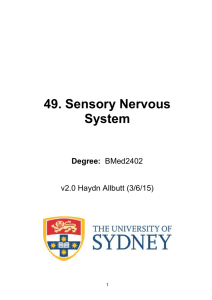
the experiment.
in Figure 3 to Figure 4 which shows
typically produced by subjects of
14
the experiment.
the cycles
period was less than 1 for all perturbations.
Another robustness test was performed by introducing
uncertainty in choosing the appropriate controller around the
equilibrium.
0.95
shows
Specifically,
this boundary was chosen as the region:
(desired production)/(production capacity)
1.05.
Figure 5
the simulation result when the controller for FDS < 1 was
chosen for this boundary.
The response exhibits some underdamped
fluctuations due to the complex conjugate pair,
unimportant.
but they seem to be
Figure 6 shows the simulation result when the
controller for FDS = 1 was chosen for this boundary.
Since the
controller for FDS = 1 was overdamped, when used in the boundary,
never bounces the system into the region FDS = 1.
Thus, FDS never
makes it to 1, and gets into a cycle where it slides down,
(but below 1),
slides back down, etc.
it
jumps up
Recall that there was an
extra degree of freedom in the controller for FDS = 1, which was not
used, since BGS is uncontrollable.
included in the controller.
Specifically, BGS was not
To correct for the above deficiency,
multiple of BGS was added to the controller for FDS = 1.
a
This has
no effect in the region FDS = 1, since the capital sector is
decoupled from the goods sector in this region.
In the boundary,
this could be used to correct the undesired effect of the
uncertainty.
Figure 7 illustrates the simulation result when 12
BGS was added to the controller of the region FDS = 1.
of
The response
is greatly improved, and FDS settles at 1 in this case.
Intuitively, when faced with an unstable region and uncertainty
in the states, a robust controller will err on the side of caution
by moving the system rapidly to the stable zone even at the cost of
15
III
possibly moving
results for
goods
farther into
the stable zone
than necessary.
other simulations where different waveforms for
sector demand were chosen are summarized
The controller
perturbations
in Table
the
1.
seems to be robust with respect to perturbations
in the desired pole locations,
uncertainty
The
which also correspond
in the feedback gains.
to
The discrepancy due to
the
in choosing the appropriate controller around
equilibrium was corrected by using the additional degree of freedom
in the
results are not contingent on
Thus the
region FDS = 1.
precise knowledge of the system parameters.
The controller designed in this paper could be modified to
follow ramp inputs better,
but
response to other
More advanced control
inputs.
linear quadratic regulation,
is
likely to give worse results in
could be applied to
requires the use of packaged programs to solve
techniques,
such as
this problem,
but
the necessary
equations.
Conclusions and Further Analysis
This paper presents a heuristic application of control
to an economic model.
Although we considered one case,
theory
the same
approach can be applied to a wide class of problems which exhibit
the same structure,
that
is,
any system with a region in which
resources are fully utilized and a
results
region of slack.
In general,
the
show that a problem which is highly nonlinear can be
controlled quite satisfactorily with the aid of simple mathematical
analysis and basic control concepts.
16
We have considered two key
techniques for approaching such nonlinear problems:
1. Linearization around the nominal
used technique.
trajectory: This is a commonly
The results of Vidyasagar (Vidyasagar 1978),
although complicated, are particularly useful in finding the class
of "slowly varying" trajectories that the system would be stable
around.
We verified this for step inputs by simulation.
Ramp
inputs and sinusoids seem to present some problems.
2. Analyzing piecewise-linear nonlinearities in linear regions
separately: We considered a common example of this case, saturation.
However,
since the general applications of control
the system to operate in the unsaturated region,
theory require
there is not much
rigorous analysis to be found in the literature for the case when
the operating point is required to be on the boundary between the
two regions, as in many system dynamics problems.
This perhaps
merits a rigorous analysis.
Comparing the "Optimal"
Policy with Actual Dectsion-Makhing Practice:
Many economists argue that dysfunctional oscillations such as
the long wave cannot exist since economic agents with rational
expectations would behave in an optimal fashion.
shows that
The analysis here
there are in fact optimal strategies for investment which
can avoid instability.
But, it is very unlikely that the results
presented in this paper would be achieved in practice through
conventional decision making processes.
by the experimental results
This assertion is supported
in Sterman 1987 and Sterman 1988a.
The
decision rule developed here requires information a manager in real
life is unlikely or unable to have.
17
It then processes that
III
information
in a highly sophisticated fashion.
optimal rule utilizes knowledge of
system to compute
firms.
the
stock and new orders.
demand.
But
firm'to be able to
is excess or insufficient capacity compared to
in reality, an individual
firm is unable to
whether customers' orders represent long run needs,
adjustments,
fooled,
or self-ordering effects.
The optimal
ordering still more in response to the
their own attempt to raise capacity.
It
single decision process which is
full
the
Rather, as
in each regime,
experiments with
locally rational
important
(but leads to poor
large gap between the requirements of optimal
type,
the
trend of
the inputs
in practice than precise values.
robustness also suggest
errors,
tend to use a
system).
control and the reality of bounded rationality,
problems of this
we stress
that
The tests of controller
that small variations due to modelling
the analysis is
the critical
determining the best strategy.
The main
role of nonlinearity in
Performance can be dramatically
18
in
is much more
etc. still produce very satisfactory results.
result of
into
is unlikely that actual
managers, economists, and students confirm, people
To overcome
rule is not
firm cannot distinguish with certainty which
regime the economy is operating in.
in the
transient stock
rise in demand induced by
firms use dramatically different decision rules
performance
tell
the Strategem-2 game frequently are,
as players of
particularly since a
The
strategies depending
on which regime one is operating in, requiring a
there
the
full economy is not known to real
The rule also requires very different
decide whether
the
the equilibrium structure of
targets for capital
equilibrium structure of
In particular,
improved by determining which regime one
reacting accordingly,
even if
only approximately correct.
is operating in and
the decision rules for each regime are
As in any policy analysis,
implementation will depend on the modeller's ability to explicate
the rationale for
the policy.
reinforces rather than replaces
justification of
The use of control
concepts
the need for managerially oriented
the proposed policies.
19
III
REFERENCES
1985. The Use of Optimization Methods
Coyle, R. G.
in a System Dynamics Model,
J.
Forrester,
Investment,
Guckenheimer,
System Dynamics Review,
1968. Market Growth as
Ind.
for Policy Design
1:81-91.
Influenced by Capital
Man. Rev.
J. and
Dynamical Systems,
P. Holmes
1983. Nonlinear Oscillations,
and Bifurcations
of Vector Fields,
Springer-Verlag.
Kailath, T.
1980. Linear Systems, Prentice-Hall
Kivijarvi, H. and M.
1986.
Tuominen,
J.
1980. Corporate
Solving Optimal Control
System Dynamics Review,
Problems with System Dynamics,
Lyneis,
Inc.
2(2):138-149.
Planning and Policy Design, Cambridge,
MIT Press.
Mass, N.
1975. Economic Cycles:
An Analysis
of Underlying Causes,
Cambridge, MIT Press.
Meadows, D. L.
1969. Dynamics
of Commodity Production Cycles,
Cambridge, MIT Press.
20
Mohapatra, P. K. J. and S. Sharma, 1985. Synthetic Design of Policy
Decision in System Dynamics Models: A Modal Control Theoretical
Approach, System Dynamics Review,
Rasmussen, S.,
1:63-80.
E. Mosekilde and J. D. Sterman 1985. Bifurcations and
Chaotic Behavior in a Simple Model of the Economic Long Wave, System
Dyanmics Review,
1:92-110.
Roberge, J. K. 1975. Operational Amplifiers: Theory and Practice,
John Wiley and Sons Inc.
Sterman, J. D. 1985. A Behavioral Model of the Economic Long Wave,
Journal of Economic Behavior and Organization, 6:17-53.
Sterman, J. D. and D. Meadows 1985. Strategem-2, Simulation and
Games,
16(2):174-202.
Sterman, J. D. 1986. The Economic Long Wave: Theory and Evidence,
System Dynamics Review, 2(2):87-125.
Sterman, J. D. 1987. Testing Behavioral Simulation Models by Direct
Experiment, Management Science, 33(12):1572-1592.
Sterman, J. D.
1988a. Misperceptions of Feedback in Dynamic
Decision Making, Organizational Behavior and Human Decision
Processes, forthcoming.
21
III
Sterman, J. D. 1988b. Deterministic Chaos in Models of Human
Systems:
Methodological
Issues and Experimental Results,
System
Dynamics Review, 4:148-178.
Szymkat,
M. and E.
Mosekilde 1986. Global Bifurication Analysis of
an Economic Long Wave Model,
presented at
Simulation Congress, Antwep,
Belgium.
Vasko, T.
Vidyasagar
(ed.)
1987.
the 2n
European
The Long Wave Debate, Berlin,
Springer.
1978. Nonlinear Systems Analysis, Prentice Hall.
22
APPENDIX
Equations for the Controller
FDS <1:
Given desired polynomial X 3+aX2+bX+c, the feedback vector is:
Hi = [ h 1 h2 h3] where
2
- r
h 1 = (/(xBGS))(rx
where
r = -BKS/(CORxr) +
1/ALC
+ r -a
h2=
h3
+ axr - b - CORxc/(xBGS(r-COR)))
= CORxc/(0xBGSx(r-COR))
FDS =
- (BKS/BGS)(
+ r -a)
1:
Only two poles can be placed.
2
polynomial X +aN+b,
h2
h3 ]
Thus, given a desired second order
the feedback vector is:
where
H2
= [h 1
h
= axNCAT/ALC - NCAT/ALC 2
h2
= a
- bxNCAT
- 1/NCAT - 1/ALC
The value of h 3 does not effect the characteristic polynomial.
Recall that we used this degree of freedom to improve robustness.
23
CAPITAL SECTOR
r
Figure l.a
Simulation Model
24
Equations of the Long Wave model: version to simulate the STRATEGEM-2 game.
New orders for capital placed by the consumer goods and services sector (NGS) are
exogenous. In the experiment, the new orders of the capital sector (NKS) are
determined by the player. Inthe analysis presented here, NKS is determined by the
controller.
Capital Sector:
FDS = PR/DP
Fraction of Demand Satisfied (dimensionless)
DP = (BKS+BGS)/NCAT
Desired Production (units/year)
NCAT = 2
Normal Capital Acquisition Time (years)
PR = MIN(DP,PC)
Production Rate (units/year)
PC = K/COR
Production Capacity (units/year)
COR = 2
Capital Output Ratio (years)
K= K + dt* (CA- CD)
CD = KIALC
Capital Stock (units)
Capital Discard Rate (units/year)
ALC = 20
Average Life of Capital (years)
CA = FDS*BKS/NCAT
Capital Acquisition Rate (units/year)
BKS = BKS + dt* ( NKS- CA)
Backlog of orders of the capital sector (units)
NKS = Determined by subject
New Orders of the Capital Sector (units/year)
Goods and Services Sector:
BGS = BGS + dt * ( NGS - GCA)
GCA = FDS*BGS/NCAT
Backlog of orders of the goods sector (units)
NGS = Exogenous
Goods Sector: Capital Acquisition Rate (units/year)
New Orders of the Goods Sector (units/year)
dt = 2
Simulation time step (years)
Figure
1.b Equations of the Long Wave
25
Model
III
K
BKS
BGS
I
.11
II
Calculate
Calculate
H1
Desired
poles
(SPEED 1 )
H2
-
-
Desired
poles
(SPEED 2 )
_.~~~~~~~~~~~~~~~~
1
6K, 6BKS,
Input 1
-Input 2
BGS
l
it
LI
r-
2
Multiplier
Multiplier
i
.
I6NKS 2
6NKS 1
I
I
Is
FDS
) NKS
FDS<1?
K ,BKS, BGS
n
n
n
-
YES :Pick 6NKS 2
l
EQUATION
NGS
Pick 6NKS1
-
NKS
n
9
Figure 2 Block diagram of controller.
26
3 NKS
2 DesiredK
1K
800.0
600.0
12
12
12 ---
1 2-
12
12
400.0
200.0
3
-T/3,-r0.0
0.0
1 FDS
X
3
54.0
54.0
36.0
Time
18.0
3
2 NKSn
.
72.0
NKS
100.0
1.0
62.5
0.8
25.0
0.5
-12.5
0.3
-50.0
0.0
NKS n
SNKS
Time
Figure 3 Simulation of the basic run: Response to a 10l step
increase in demand.
Score = 15;
K, DesiredK. NKS: units; FDS: X.
27
FDS
111
Units
Trial 6: SCORE = 908
Units
Trial I : SCORE= 651
---- r
0
Years
Units
Trial 16: SCORE= 479
Units
Trial 24: SCORE = 366
Years
Yeers
Trial 40. SCORE = 161
Units
Trial 30: SCORE = 212
Units
IZUUr
I uuu r-
1003
1\
800
800
600
600
400
400
200
200
0
/ I1.
,
0
I0
I I , ,
20
.1
I%
.j
30
, , 47---- 1
Years
40
I
50
.....
.
.
--
I
60
,
I
70
n
u
,
0
1O
0
,
. I.
20
30
Years
40
I
50
,
II
60
I
70
Desired Production
Production CaDacity
.................. Subects Orders
for Capital
Figure 4 Typical experimental results.
Note the large amplitude and
long period of the cycles generated by the subjects.
scales differ.
28
N.B.: vertical
2 DesiredK
1K
800.0
2
600.0
1
1 is
~1 -
12_----12
12
12
400.0
200.0
0.0
_
'
.
'
.
.. . . . 1. .I
1 FDS
NKS
'
l
t
36.0
Time
54.
54.0
72.0
2 NKS
hhh
_
LUU .U
I
18.0
0.0
.
q -
.-
1
4
1.0
150.0
0.8
1oo.o
o.5
50.0
0.3
0.0
0.0
I
. .-
I
_e.
3
Time
Figure 5 Controller for FDS<1 used in the boundary whenever
.95
DP/PC
1.05.
Score = 18; K, DesiredK, NKS: units; FDS: X.
29
FDS
111
I K
2 DesiredK
800.0
600.0
1 2
21
1 2-
'
12
12-
400.0
200.0
0.0
. . . .*.
-
0.0
~~18.0
1
18.0
I ''
'' ' ' ' '
1 FDS
-
-- - - - - - - -
-
-- -- - - - - - - -- - -
54.0
72.0
2 NKS
200.0
NKS
v
36.0
Time
1
1--
1.0
1
150.0
0.8
100oo.o
0.5
50.0
0.3
0.0
0.0
I
Time
Figure 6 Controller for FDS=l used in the boundary whenever
.95 < DP/PC
1.05.
Score = 21; K, DesiredK, NKS: units;
30
FDS: X.
FDS
1K
2 DesiredK
800.0
600.0
1
= i 2----11 2-
I
12....
1 2-
12-
400.0
200.0
0.0
......
w
i
0.0
-
'
I
'
I.
. . . . .
1 FDS
L
.I 0 ' '
'
'
_7_
_ _1_36.0
Time
I
1 8.0
- - - - - - - - - - - - - - - - - - - - -_ __ _
54.0
I
54.0
72.0
2 NKS
111^^
5U .U
1.0
150.0
NKS
0.8
oo.o
0.5
50.0
FDS
0.3
0.0
C
0.0
54.0
Time
Figure 7
Score =
Improvement
19;
K,
of controller
DesiredK,
NKS:
for FDS=1 used
units;
31
FDS:
X.
in
the boundary.
III
Table
1 Summary of simulations with various waveforms for NKS.
FDS
K
NGS
Ramp with a lag
No equilibrium
Ramp
225+2.5(t-2)
Above 90%
Avg score
per period
Settles
around
100
Sinusoidal
225+50
2rt
-2)
72sin
Gaussian Noise
225+20xNORMAL
Periodic
between
Distorted
sinusoidal
_
__
100% and 70%
_
Fluctuates
between
Noisy
but stable
100% and 60%
32
Settles
around
125
Below
200