A bilayer model to study the evolution of a thin... over water
advertisement

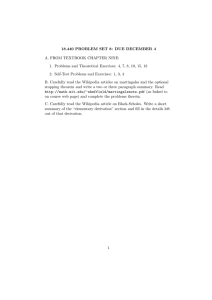
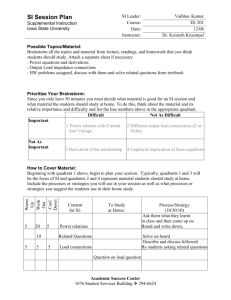
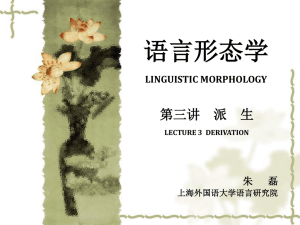
A bilayer model to study the evolution of a thin pollutant layer over water Gladys Narbona-Reina (U. Sevilla) Co-workers: E.D. Fernández-Nieto (U. Sevilla) J.D. Zabsonré (U. Bobo-Diulaso) Ecole EGRIN. April 2013. Domaine de Chalès. Outline 1 Introduction 2 Derivation of the model 3 Local energy 4 Numerical results Outline 1 Introduction 2 Derivation of the model 3 Local energy 4 Numerical results Motivation Study some natural disasters Oil spills in the ocean. Motivation Study some natural disasters Oil spills in the ocean. Some considerations Fluids with different physical properties. Flows with different behavior. Different thickness and velocity. Introduction Goal Deduction of a bilayer model taking into account these differences. Approach • Upper layer: Crude oil. Viscous fluid Thin film slow flow ⇒ Reynolds lubrication equation. • Lower layer: Water. ⇒ shallow-water equation. • Different thickness and velocity: ⇒ Multiscale analysis in space and time. Introduction Goal Deduction of a bilayer model taking into account these differences. Approach • Upper layer: Crude oil. Viscous fluid Thin film slow flow ⇒ Reynolds lubrication equation. • Lower layer: Water. ⇒ shallow-water equation. • Different thickness and velocity: ⇒ Multiscale analysis in space and time. Introduction Goal Deduction of a bilayer model taking into account these differences. Approach • Upper layer: Crude oil. Viscous fluid Thin film slow flow ⇒ Reynolds lubrication equation. • Lower layer: Water. ⇒ shallow-water equation. • Different thickness and velocity: ⇒ Multiscale analysis in space and time. Introduction Goal Deduction of a bilayer model taking into account these differences. Approach • Upper layer: Crude oil. Viscous fluid Thin film slow flow ⇒ Reynolds lubrication equation. • Lower layer: Water. ⇒ shallow-water equation. • Different thickness and velocity: ⇒ Multiscale analysis in space and time. Outline 1 Introduction 2 Derivation of the model 3 Local energy 4 Numerical results Governing equations 2D incompressible Navier-Stokes for both layers: ρi (∂t ui + ui ∂x ui + wi ∂z ui ) = −∂x pi + 2ρi νi ∂x (∂x ui ) + ρi νi ∂z2 ui + ρi νi ∂z (∂x wi ); ρi (∂t wi + ui ∂x wi + wi ∂z wi ) = −∂z pi − ρi g + ρi νi ∂x2 wi + ρi νi ∂z (∂x ui ) + 2ρi νi ∂z2 wi ; ∂x ui + ∂z wi = 0; i = 1, 2. z Γs h2 Γ1,2 vi = (ui , wi ): velocities. pi : pressures. ρi : densities. h1 νi : kinematic viscosities. b x σi = 2ρi νi D(vi ) − pi Id: stress tensors. t vi (D(vi ) = ∇vi +∇ ) 2 Governing equations Boundary conditions: Free surface (η = b + h1 + h2 ): - Kinematic condition: ∂t η + u2 ∂x η = w2 ; - Normal stress balance: (σ2 · Ns )n = −δ κ Ns . Governing equations Boundary conditions: Free surface (η = b + h1 + h2 ): - Kinematic condition: ∂t η + u2 ∂x η = w2 ; - Normal stress balance: (σ2 · Ns )n = −δ κ Ns . Interface (I = b + h1 ): - Kinematic conditions: ∂t h1 + ui ∂x I = wi , i = 1, 2. - Normal stress balance: (σ1 · NI )n − (σ2 · NI )n = (δI κI nI )n . - Friction condition: (σi · NI )τ = −cρ2 (v1 − v2 )τ . Governing equations Boundary conditions: Free surface (η = b + h1 + h2 ): - Kinematic condition: ∂t η + u2 ∂x η = w2 ; - Normal stress balance: (σ2 · Ns )n = −δ κ Ns . Interface (I = b + h1 ): - Kinematic conditions: ∂t h1 + ui ∂x I = wi , i = 1, 2. - Normal stress balance: (σ1 · NI )n − (σ2 · NI )n = (δI κI nI )n . - Friction condition: (σi · NI )τ = −cρ2 (v1 − v2 )τ . Bottom: - No-penetration: v1 · Nb = 0. - Friction condition: (σ1 · Nb )τ = α(v1 )τ . Derivation of the model Steps: 1 Shallow domain assumption for each layer: = H << 1; L 2 = H2 << 1. L 2 Dimensionless / Multiscale assumption. 3 Asymptotic analysis. 4 Vertical integration and hydrostatic approximation. Derivation of the model Steps: 2 Dimensionless: Layer 1 (shallow-water) x = Lx∗ , z1 = Hz∗1 , h1 = Hh∗1 u1 = Uu∗1 , w1 = εUw∗1 , t = Tt1∗ p1 = ρ1 U 2 p∗1 , U Fr1 = √ ; gH Re1 = UL ; ν1 Layer 2 (Reynolds) x = Lx∗ , z2 = H2 z∗2 , h2 = H2 h∗2 u2 = U2 u∗2 , w2 = ε2 U2 w∗2 , t = T2 t2∗ p2 = ρ2 ν2 U2 ∗ p , 2 H2 2 U2 Fr2 = √ ; gH2 Re2 = U2 L . ν2 Derivation of the model Steps: 2 Dimensionless: Layer 1 (shallow-water) x = Lx∗ , z1 = Hz∗1 , h1 = Hh∗1 u1 = Uu∗1 , w1 = εUw∗1 , t = Tt1∗ p1 = ρ1 U 2 p∗1 , U Fr1 = √ ; gH Re1 = UL ; ν1 Layer 2 (Reynolds) x = Lx∗ , z2 = H2 z∗2 , h2 = H2 h∗2 u2 = U2 u∗2 , w2 = ε2 U2 w∗2 , t = T2 t2∗ p2 = ρ2 ν2 U2 ∗ p , 2 H2 2 U2 Fr2 = √ ; gH2 Re2 = U2 L . ν2 Related aspects: H2 = H , U2 = 2 U → 2 = 2 Derivation of the model Steps: 2 Dimensionless: Layer 1 (shallow-water) x = Lx∗ , z1 = Hz∗1 , h1 = Hh∗1 u1 = Uu∗1 , w1 = εUw∗1 , t = Tt1∗ p1 = ρ1 U 2 p∗1 , U Fr1 = √ ; gH UL ; ν1 Re1 = Layer 2 (Reynolds) x = Lx∗ , z2 = Hz∗2 , u2 = 2 Uu∗2 , w2 = ε4 Uw∗2 , t= 2 U Fr2 = √ ; gH Re2 = p2 = ρ2 ν2 U ∗ p , H 2 h2 = Hh∗2 1 ∗ Tt 2 2 UH . ν2 Derivation of the model Steps: 2 Dimensionless: Layer 1 (shallow-water) x = Lx∗ , z1 = Hz∗1 , h1 = Hh∗1 u1 = Uu∗1 , w1 = εUw∗1 , t = Tt1∗ p1 = ρ1 U 2 p∗1 , U Fr1 = √ ; gH UL ; ν1 Re1 = Layer 2 (Reynolds) x = Lx∗ , z2 = Hz∗2 , u2 = 2 Uu∗2 , w2 = ε4 Uw∗2 , t= 2 U Fr2 = √ ; gH Re2 = p2 = b = Hb∗ , ρ2 ν2 U ∗ p , H 2 α = Uα∗ ; c = Uc∗ ; C= h2 = Hh∗2 2 Uρ2 ν2 , δ 1 ∗ Tt 2 2 UH . ν2 CI = Uρ1 ν1 . δI Derivation of the model Steps: 2 Dimensionless: Layer 1 (shallow-water) x = Lx∗ , z1 = Hz∗1 , h1 = Hh∗1 u1 = Uu∗1 , w1 = εUw∗1 , t = Tt1∗ p1 = ρ1 U 2 p∗1 , U Fr1 = √ ; gH UL ; ν1 Re1 = Layer 2 (Reynolds) x = Lx∗ , z2 = Hz∗2 , u2 = 2 Uu∗2 , w2 = ε4 Uw∗2 , t= 2 U Fr2 = √ ; gH Re2 = p2 = ρ2 ν2 U ∗ p , H 2 z∗1 ∈ [b∗ , I] = [b∗ , b∗ + h∗1 ]; h2 = Hh∗2 1 ∗ Tt 2 2 UH . ν2 z∗2 ∈ [I , η ] = [ 1 (b∗ + h∗1 ), 1 (b∗ + h∗1 ) + h∗2 ] Derivation of the model Steps: 3 Asymptotic analysis: ν1 = O(), ν2 = O(), α = O(), c = O(), δI = O(−2 ), δ = O(−2 ). 1 Re1 = O( ); Re2 = O(1); CI−1 = O(−2 ); and we develop the unknowns up to order 1: h̃i = h0i + εh1i , ũi = u0i + εu1i , C−1 = O(−5 ) p̃i = p0i + εp1i , (i = 1, 2). Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Shallow water layer. ? u1 does not depend on z at first order. ∂t h1 + ∂x (h1 u1 ) = 0, ρ1 ∂t (h1 u1 ) + ρ1 ∂x (h1 u21 + + 1 1 2 1 h1 ) − 4µ01 ∂x (h1 ∂x u1 ) + ρ1 2 h1 ∂x b 2 Fr2 Fr ρ2 −1 3 h1 ∂x (p2 |I ) − h1 µ01 CI0 ∂x (b + h1 ) + ρ2 c0 u1|I + α0 γ(h1 )u1|b = 0. Re2 γ(h1 ) = α0 1+ h1 3ρ1 µ01 −1 ; µ01 = 1 Re1 Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Reynolds layer. −∂z2 u˜2 + ∂x p˜2 = 0 ∂z p˜2 = −β0 ; β0 = 3 Re2 = O(1) Fr22 Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Reynolds layer. −∂z2 u˜2 + ∂x p˜2 = 0 ∂z p˜2 = −β0 p˜2 Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Reynolds layer. −∂z2 u˜2 + ∂x p˜2 = 0 ∂z p˜2 = −β0 u˜2 p˜2 Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Reynolds layer. −∂z2 u˜2 + ∂x p˜2 = 0 ∂z p˜2 = −β0 u˜2 From the incompressibility equation: ∂t h˜2 + ∂x ( Z η u˜2 dz) = 0. I p˜2 Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. 1 1 1 2 h̃ ũ + ∂ h̃ − h̃ ∂ p̃ = 0, ∂t2 h̃2 + ∂x − 2 1 x 2 x 2 2 2 c0 Re2 3 ∂x p˜2 = C0−1 ∂x3 η + β0 ∂x η Derivation of the model Steps: 4 Vertical integration and hydrostatic approximation. • Completion of layer 1: Values ∂x (p˜2 |I ) and u1|I From p˜2 : ∂x (p˜2 |I ) = C0−1 ∂x3 η + β0 ∂x (η − I ) Thanks to the friction condition at the interface: u1|I = h2 ∂x p2 c0 Re2 Final model: ∂t h1 + ∂x (h1 u1 ) = 0, 1 ∂t (h1 u1 ) + ∂x (h1 u1 2 ) + g∂x h21 + gh1 ∂x b − 4ν1 ∂x (h1 ∂x u1 ) 2 δ 3 δI ∂x (b + h1 + h2 ) + rg∂x h2 − h1 ∂x3 (b + h1 ) +h1 ρ1 ρ1 (M1 ) ≡ δ α +h2 ∂x3 (b + h1 ) + rg∂x (b + h1 ) + γ(h1 )u1 = 0. ρ1 ρ1 ∂t h2 + ∂x (h2 u1 ) + ∂x −h2 2 1 1 + 1 h2 ∂x p2 = 0. ρ2 c 3ν2 with ∂x p2 = δ ∂x3 (b+h1 +h2 )+ρ2 g∂x (b+h1 +h2 ), r = Normal stress balance Friction terms ρ2 ρ1 and γ(h1 ) = 1+ α h1 3ν1 −1 . Outline 1 Introduction 2 Derivation of the model 3 Local energy 4 Numerical results Energy balance for M1 Multiply: momentum equation for water layer by equation of thin film flow by and sum up the resulting equations. u1 δ∂x2 (b + h1 + h2 ) + ρ2 g(b + h1 + h2 ) Energy balance for M1 ∂t u21 2 + gh1 (b + h1 ) 2 + rgh2 b + h1 + h2 2 − ρδ1 ∂t (h1 + h2 )∂x2 (b + h1 + h2 ) + 12 (∂x (h1 + h2 ))2 + δρI1 ∂t h1 ∂x2 (b + h1 ) + 12 (∂x h1 )2 2 u +∂x h1 u1 21 + g(h1 + b) + rgh2 u1 (b + 2h1 + h2 ) 2 u −∂x 4ν1 h1 ∂x 21 + h22 ρ12 1c + 3ν1 2 h2 ∂x 12 (δ∂x2 (b + h1 + h2 ) + ρ2 g(b + h1 + h2 ))2 − ρδ1 ∂x (h1 + h2 )u1 ∂x2 (b + h1 + h2 ) − (h1 + h2 )∂t (∂x (h1 + h2 )) + δρI1 ∂x h1 u1 ∂x2 (b + h1 ) − h1 ∂t (∂x h1 ) ≤ R = R2 + ρδ1 u1 h2 ∂x3 (h2 ) + rgu1 ∂x h22 , R2 = −4ν1 h1 (∂x u1 )2 − rg2 h22 1 c + 2 1 α h2 ∂x (b + h1 + h2 ) − γ(h1 )u21 . 3ν2 ρ1 Proposed modified model ∂t h1 + ∂x (h1 u1 ) = 0, 1 ∂t (h1 u1 ) + ∂x (h1 u1 2 ) + g∂x h21 + gh1 ∂x b − 4ν1 ∂x (h1 ∂x u1 ) 2 δ 3 δI +h1 ∂x (b + h1 + h2 ) + rg∂x h2 − h1 ∂x3 (b + h1 ) ρ1 ρ1 (M2 ) ≡ δ α ∂x3 (b + h1 + h2 ) + rg∂x (b + h1 + h2 ) + γ(h1 )u1 = 0, +h2 ρ ρ 1 1 ∂t h2 + ∂x (h2 u1 ) + ∂x −h2 2 1 1 + 1 h2 ∂x p2 = 0. ρ2 c 3ν2 ∂x p2 = δ ∂x3 (b + h1 + h2 ) + ρ2 g∂x (b + h1 + h2 ) Added terms are of order 2 . Outline 1 Introduction 2 Derivation of the model 3 Local energy 4 Numerical results Numerical results: Test 1: Comparison with a viscous bilayer shallow water model Ω = [0, 25]; b(x) = 0. c = 1; ᾱ = 10−3 . Initial conditions: q1 (t = 0) = 0, h1 (t = 0) = 1; h2 (t = 0) = 0.04, 0, if x ∈ [12, 13], otherwise. 1 0.8 b b+h1 0.6 b+h1+h2 0.4 q 1 0.2 0 −0.2 0 5 10 15 20 −6 25 Fluids properties: Sea water → ρ1 = 1027, ν1 = 10 Marine residual fuel → ρ2 = 920, ν2 = 5.9783 × 10−4 , δ = 0.033 0.027 if h2 > 0, δI = 0.072 if h2 = 0. Numerical results: Test 1: Comparison with a viscous bilayer shallow water model Ω = [0, 25]; b(x) = 0. c = 1; ᾱ = 10−3 . Initial conditions: q1 (t = 0) = 0, h1 (t = 0) = 1; h2 (t = 0) = 0.04, 0, if x ∈ [12, 13], otherwise. 1 0.8 b b+h1 0.6 b+h1+h2 0.4 q 1 0.2 0 −0.2 0 5 10 15 20 −6 25 Fluids properties: Sea water → ρ1 = 1027, ν1 = 10 Marine residual fuel → ρ2 = 920, ν2 = 5.9783 × 10−4 , δ = 0.033 0.027 if h2 > 0, δI = 0.072 if h2 = 0. Test 1: Comparison with a viscous bilayer shallow water model Reynolds/Saint Venant (zoom) 1.1 1.1 b+h1 1.08 1.08 b+h1+h2 1.06 1.06 1.04 1.04 1.02 1.02 1 1 0.98 0.98 0.96 0.96 0.94 0.94 0.92 0.92 0.9 11 11.5 12 12.5 t = 0.1 13 13.5 14 0.9 11 1.1 1.1 1.08 1.08 1.06 1.06 1.04 1.04 1.02 1.02 1 1 0.98 0.98 0.96 0.96 0.94 0.94 0.92 0.9 11 12 12.5 13 13.5 14 11.5 12 12.5 13 13.5 14 12 12.5 13 13.5 14 t = 0.2 0.92 11.5 12 12.5 t = 0.3 13 13.5 14 0.9 11 1.1 1.1 1.08 1.08 1.06 1.06 1.04 1.04 1.02 1.02 1 1 0.98 0.98 0.96 0.96 0.94 t = 0.5 0.94 0.92 0.9 11 11.5 0.92 11.5 12 12.5 t=1 13 13.5 14 0.9 11 11.5 t = 2.5 Test 1: Comparison with a viscous bilayer shallow water model Saint Venant/Saint Venant 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 ï0.2 0 0 5 10 15 20 25 ï0.2 0 5 t = 0.3 15 20 25 20 25 t = 0.5 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 ï0.2 10 0 0 5 10 t=1 15 20 25 ï0.2 0 5 10 15 t = 2.5 G. NARBONA -R EINA , J. D. D. Z ABSONR É , E.D. F ERN ÁNDEZ -N IETO , D. B RESCH . CMES 43(1), 27-71, 2009. Numerical results: Test 2: Pollutant dispersion near the coast 2 −(x−8) e 10 if x ≤ 8, Ω = [0, 12]; b(x) = c = 10−1 −(x−20)2 −122 50 50 1+e −e if x > 8; Initial conditions: q1 (t = 0) =0, h1 (x, 0) = max(0.78 − b(x), 0) − h2 (x, 0); 2 max(sin(2 x − 2) , 0), if x ∈ [5, 21], h2 (x, 0) = 0, otherwise. 1.4 1.2 1 0.8 b b+h1 0.6 b+h1+h2 0.4 q 1 0.2 0 −0.2 −0.4 0 2 4 Boundary condition: u1 (0, t) = 0.4 sin 6 tπ 5 8 . 10 12 Test 2: Pollutant dispersion near the coast 1.4 1.4 1.2 1.2 1 1 0.8 0.8 b b+h1 0.6 0.6 b+h1+h2 0.4 0.4 q 1 0.2 0.2 0 0 −0.2 −0.2 −0.4 0 2 4 6 8 10 12 −0.4 0 2 t=2 6 8 10 12 8 10 12 8 10 12 t=3 1.4 1.4 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 −0.2 −0.2 −0.4 −0.4 0 2 4 6 8 10 12 0 2 t=4 4 6 t=5 1.4 1.4 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 −0.2 −0.2 −0.4 4 0 2 4 6 t=7 8 10 12 −0.4 0 2 4 6 t=8 Test 2: Pollutant dispersion near the coast Influence of the interface friction coefficient 1.4 1.4 1.2 1.2 1 1 0.8 0.8 b b+h1 0.6 0.6 b+h1+h2 0.4 0.4 q 1 0.2 0.2 0 0 −0.2 −0.2 −0.4 −0.4 0 2 4 6 8 10 12 0 2 1.4 1.4 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 6 8 10 12 8 10 12 0.2 0 0 −0.2 −0.2 −0.4 4 c = 10−1 c=1 0 2 4 6 8 c = 10−2 10 12 −0.4 0 2 4 6 c = 10−3 Test 2: Pollutant dispersion near the coast Range of the pollutant spread over vs. interface friction coefficient 11 10.5 10 9.5 xmax 9 8.5 8 7.5 7 6.5 6 0 0.2 0.4 0.6 c 0.8 1 Conclusions and future works Conclusions. We have deduced a coupled model Reynolds-Shallow Water equations. It is important to achieve the second order approximation to obtain viscosity and tension effects. The multiscale analysis in space-time is essential to modelize the pollutant transport over water. Future works. Derivation of a 2d model. Non-Newtonian properties for the pollutant layer? F. G ERBEAU , B. P ERTHAME . Disc. Cont. Dynam. Syst. Series B 1(1), 89–102, 2001. A. O RON , S. H. DAVIS , S. G. BANKOFF . Rev. Mod. Phys. 69(3), 931–980, 1997. Je vous remercie de votre attention