Milli-Newton Thrust Stand For Electric Propulsion
by
Jareb D. Mirczak
B.S. Mechanical Engineering
University of California, Berkeley, 2001
SUBMITTED TO THE DEPARTMENT OF AERONATUICS AND ASTRONAUTICS IN
PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE IN AERONAUTICS AND ASTRONAUTICS
AT THE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
JUNE 2003
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
SEP 1 0 2003
@ 2003 Jareb D. Mirczak. All rights reserved.
LIBRARIES
The author hereby grants to MIT the permission to reproduce and to distribute publicly paper
and electronic copies of this thesis document in whole or in part.
2
Signature of Author
Department of Aero
utics)and Astronautics
May 2003
Certified by
Michael Socha
Charles Stark Draper Laboratory
Thesis Supervisor
Certified by
Manuel Martinez-Sanchez
Professor of Aeronautics and Astronautics
Thesis Advisor
Accepted by
j
Edward M. Greitzer
H.N. Slater Professor of Aeronautics and Astronautics
Chair, Committee on Graduate Students
AFcHjveS
2
Milli-Newton Thrust Stand for Electric Propulsion
by
Jareb D. Mirczak
Submitted to the Department of Aeronautics and Astronautics on
May 23, 2003 in partial fulfillment of the requirements for
the Degree of Master of Science in Aeronautics and Astronautics
Abstract
A thrust stand has been designed, built, and tested to measure the roughly 10 mN force
produced by a Hall thruster. The thrust stand was originally intended for spaceflight
operation. It has a core design capable of withstanding linear accelerations of eleven g's and
angular accelerations of eighty-five radians per second squared. As the spaceflight
application has been delayed, a scaled back version of the thrust stand was built ground
operation.
The thrust stand is a torsional-type design. It utilizes a balance arm supported at its
center by two flexural pivots. The engine is mounted at one end of the arm so that its thrust
causes a rotation. This rotation is sensed and a controller provides force feedback to counter
the engine's thrust and null the rotation. A counterweight at the opposite end of the arm
balances mass so that background vibrations are not registered in the force measurement.
A ground based version of the thrust stand was constructed for thermal testing and
general laboratory operation at MIT. This version demonstrated force measurement to a
resolution of 0.1 mN within the range of 0 mN to 30 mN.
A considerable amount of analysis and testing was dedicated to elimination of thermal
drift. Initial testing indicated that thermal effects were a significant source of measurement
error. A suspected cause was thermal expansion of dissimilar materials, however tests to
isolate this effect could not confirm that this was the sole cause of measurement error.
The thermal drift was also quantified and correlated to several temperature
measurement of the thrust stand; temperature drop along the balance arm, temperature drop
across the pivot, and temperature rise of the thrust stand base. This relation predicts thermal
drift to within 0.2 mN.
Technical Supervisor: Michael Socha
Title: Technical Staff, Charles Stark Draper Laboratory
Thesis Advisor: Manuel Martinez-Sanchez
Title: Professor of Aeronautics and Astronautics
3
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
4
Acknowledgement
June, 2003
This thesis was prepared at The Charles Stark Draper Laboratory, Inc., under Independent
Research and Development project number IRD03-1-927.
Publication of this thesis does not constitute approval by Draper or the sponsoring agency of
the findings or conclusions contained herein. It is published for the exchange and stimulation
of ideas.
(author's signature)
5
Table of Contents
IN TRO D U CTIO
ON ......................................................................................................
2
3
1.1
ETEEV ........................................................................................................................
1.2
Thrust M easurem ent ............................................................................................
10
BACKGROUND OF SMALL FORCE MEASUREMENT ....................................
13
Thrust Stand Basics...............................................................................................
13
2.2
Challenges of Sm all Force M easurem ent .............................................................
14
2.3
Thrust Stand History.............................................................................................
15
2.4
D esign Concepts ...................................................................................................
16
TH RU ST STA N D DESIG N ......................................................................................
21
3.1
Initial Requirem ents.............................................................................................
21
3.2
D esign Selection ...................................................................................................
22
3.3
Design O verview ...................................................................................................
23
3.4
M echanical.................................................................
24
M odeling the H eat Flow ...............................................................................
30
3.5.2
H eat Flow Solutions......................................................................................
31
3.5.3
Testing the Flexures......................................................................................
34
Feedback Control.................................................................................................
37
OPERATION AND PERFORMANCE....................................................................41
4.1
Sensitivity .................................................................................................................
41
4.2
Sources of Therm al D rift ......................................................................................
44
4.2.1
Center of M ass.............................................................................................
45
4.2.2
Convection ...........................................................................
46
4.2.3
Pivot D istortion.............................................................................................
46
4.2.4
Stress Applied to Pivot..................................................................................
47
4.2.5
Tw ist in the Pivot M ount .............................................................................
51
Estim ating D rift Force ..........................................................................................
52
RECOMMENDATIONS AND CONCLUSION......................................................55
5.1
6
...............................................
3.5.1
4.3
5
9
2.1
3.6
4
9
Future Testing......................................................................................................
55
5.2
Completing the Ground Based Thrust Stand ........................................................
57
5.3
Spaceflight Considerations ...................................................................................
58
APPENDIX A: TRADE STUDY ..........................................................................................
61
APPENDIX B: MACHINE DRAWINGS.........................................................................63
APPENDIX C: COMPONENT SPECIFICATIONS.........................................................75
OMEGA 44007 Precision Thermistors.............................................................................75
Minco H4A20W28V Button Heater .....................................................................................
78
BEI LA1O-08-OOOA Voice Coil............................................................................................81
Schaevitz 050 DC-EC LVDT .........................................................................................
83
APPENDIX D: CIRCUIT DIAGRAMS...............................................................................87
Temperature Measurement ...............................................................................................
87
PWM Averaging & Current Measurement ...........................................................................
88
APPENDIX E: COMMERCIAL CONTROLLER ............................................................
91
APPENDIX F: LAUNCH CLAMPING...............................................................................95
REFERENCES........................................................................................................................99
7
List of Figures
Figure 1: Inverted pendulum...........................................................................18
Figure 2: Long-period pendulum.........................................................................18
Figure 3: Electromagnetic concept....................................................................19
Figure 4: Torsional balance...........................................................................19
Figure 5: Thrust stand solid model....................................................................25
Figure 6: Assembled thrust stand.....................................................................25
Figure 7: The balance arm..............................................................................25
Figure 8: Lucas Free-Flex pivot........................................................................26
Figure 9: Heat flow diagram...........................................................................29
Figure 10: Therm al model................................................................................31
Figure 11: Results of thermal analysis.............................................................32
Figure 12: Heat reduction schemes..................................................................32
Figure 13: The heat stop..............................................................................34
Figure 14: Thermal test setup.........................................................................36
Figure 15: Thrust stand calibration.....................................................................40
Figure 16: Therm al drift..................................................................................43
Figure 17: Thermal characteristics of the pivot...................................................45
Figure 18: Drift at uniform temperature..............................................................46
Figure 19: Source of thermal drift..................................................................47
Figure 20: Drift from temperature gradients..........................................................47
Figure 21: Operation with one pivot................................................................49
Figure 22: The pivot mount............................................................................50
Figure 23: Correlation between drift force and temperature.......................................52
Figure 24: Proposed pivot modifications...........................................................54
Figure 25: Alternative pivot modification.........................................................54
Figure 26: Design evolution..........................................................................55
Figure 27: Spaceflight configuration...............................................................57
8
1 INTRODUCTION
The development of electric thrusters for micropropulsion has become increasingly
popular in recent years. These engines can act as the primary thrust for satellites with low
mass, or they can perform a variety of positioning functions for larger satellites. These tasks
include attitude control, orbit raising, drag makeup, and station-keeping [9].
Microsatellites have experienced renewed interest in the past decade due to their low
cost and high reliability. While cost has always been a significant factor in satellite design,
recent cutbacks in the aerospace industry have amplified its importance. With a lower mass,
microsatellites provide an obvious savings in launch cost, but their generally simple design
also allows savings during production and assembly [9]. A small satellite is usually dedicated
to a single function. The overall system is simple and reliable because compromises are not
required to integrate various functions [9].
For many missions, it is not the payload, but the support systems, such as propulsion,
that limits miniaturization. Propellant mass is often a dominant contributor to overall satellite
mass. A miniature propulsion system can therefore greatly reduce the system mass, however,
since the AV requirements are largely mission, and not size dependent, these engines must
maintain high performance [4].
A challenging issue associated with the development of electric propulsion is accurate
and precise characterization of performance [4].
An important parameter is the engine's
thrust. Since thrust from electric propulsion is so small, development of a sensitive thrust
stand is often a major component of any micropropulsion project.
1.1
ETEEV
Electric propulsion has been through various stages of design and testing since the
1960's.
Despite this significant time period, only a handful of satellite missions have
employed electric propulsion for primary thrust or attitude control.
Due to this lack of
experience, and the high cost associated with testing in orbit, there is relatively little data
explaining on orbit operation of electric propulsion.
There is, however, a wealth of
measurements taken from electric thrusters operating in laboratory vacuums. The Electric
9
Thruster Environmental Effects Verification (ETEEV) experiment was conceived to
determine a relationship between ground-based and spaceflight characteristics [10].
One of ETEEV's primary goals is a study of the energetic, electrically charged plume
produced by electric thrusters. This plume can disrupt communications, or erode spacecraft
surfaces that it comes into contact with. Detailed measurements of surface film deposition,
surface erosion, ion flux, and ion energies will help characterize this plume.
ETEEV
complements detailed lab measurements of environmental interactions with carefully selected
checks against in-space data [10]. In addition, thrust is measured at specific operating points
to judge any change in performance between the two environments.
This comparison is important as on orbit engine performance cannot be perfectly
simulated in the laboratory. Two major sources of error are pressure and space. The pressure
in a vacuum chamber, which can be several orders of magnitude greater than that of space,
induces scattering of the plume. Additionally the limited space in a vacuum chamber allows
particles to rebound from a wall and reenter the plume.
ETEEV was a joint project combining efforts from MIT, Worcester Polytechnic
Institute, Busek Co. Inc., and Draper Laboratory. In late 2000, the project had a secured a
berth as a Hitchhiker payload on a to-be-determined Space Shuttle flight. Hitchhiker slots are
secondary Space Shuttle payloads mounted along the sidewalls and on cross beam structures
when space allows. ETEEV would be supplied with a mounting plate, power, and data
transfer capabilities. The project progressed through the design and certification process until
a lack of funding caused delays.
Eventually a demand for ISS supply missions and the
Columbia accident halted work on the spaceflight portion of ETEEV.
1.2
Thrust Measurement
To make the desired thrust measurements, ETEEV required a thrust stand capable of
on-orbit operation. Since, no available thrust stand had the right combination of sensitivity
and durability, design of a custom thrust stand was necessary. In fact, there is no record of a
small force (<1 N) thrust stand capable of spaceflight operation.
MIT's Space Propulsion Laboratory (SPL), where the ETEEV experiment was based,
was also in need of a ground based thrust stand. The current thrust stand at SPL was
10
experiencing problems with osciallations, and it required a bulky cooling system to avoid
thermal drift.
It was decided that a single thrust stand would be designed to satisfy both of these
applications. This thesis outlines design and testing of a thrust stand capable of both groundbased and on-orbit force measurements. A scaled back version of the design, one capable of
ground-based operation only, was built and tested for sensitivity and thermal response. The
thesis includes these test results as well as proposed modifications to a final thrust stand
design.
The thrust stand is designed to operate with any steady state electric thruster that
produces a force in the 10 mN range. It is specifically tailored to the Busek BHT-200 as that
is the primary engine currently used for testing at the SPL. The BHT-200 is a two hundred
watt Hall thruster that utilizes Xenon propellant.
Section 2 examines concept of small force measurement and details the various thrust
stand designs used since the 1960's. It presents four major design concepts that have proven
effected for force measurement of electric thrusters.
Section 3 discusses the design
requirements and explains why a torsional balance concept was chosen for the ETEEV thrust
stand. It then talks about the mechanical design and thermal analysis that lead to fabrication,
assembly, and testing. Section 4 examines the results of this testing. Aside from calibration
and balancing, thrust stand testing focused on measurement error due to heating effects.
Several sources of error were identified during this testing, and Section 5 proposes design
modifications to eliminate these errors.
11
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
12
2 BACKGROUND OF SMALL FORCE MEASUREMENT
For decades, precision scales have been measuring sub-micro-Newton forces for the
purpose of determining mass. The emergence of electric propulsion in the 1960's drove the
need for a new form of small force measurement.
These thrust stands were required to
support the weight of the engine while measuring a force thousands of times smaller. In
addition the engines only operated in a vacuum environment, and they applied a substantial
thermal load to the thrust stand.
Nevertheless, thrust stands to measure tens of micro-
Newtons have existed since the 1970's, and today it is possible to measure tens of nanoNewtons. There has been a wide variety of design concepts over these years and an equally
large body of literature detailing these concepts. While the basic principles remain constant,
the specific requirements of a testing program generally require the development of a custom
thrust stand. Attempts to cover the range of electric propulsion in one design have generally
resulted in detrimental cost and complexity.
2.1
Thrust Stand Basics
All small force thrust stands designed to date focus on the displacement caused by the
engine's thrust. The engine is part of a floating structure that connects to a fixed base by way
of several sensitive flexures.
Thrust from the engine causes a rotational or linear
displacement of this floating structure.
Engine thrust can then be determined from
knowledge of this displacement and the spring constant of the flexures.
A modification to this scheme involves the addition of a force actuator and a feedback
loop. This controller applies a force opposite to that of the engine so as to keep the floating
structure at a fixed position. Engine thrust is equal to the known output from the force
actuator. This is generally referred to as null balance operation. Although more complex,
null balance operation needs less calibration and does not require knowledge of the flexure
spring constant.
13
2.2 Challenges of Small Force Measurement
Measuring the force produced by an engine is not a new science.
Thrust stands,
generally based on some sort of controlled displacement, have been around for decades.
However, electric thrusters present a new problem due to the extremely small amount of
thrust they produce. A device sensitive enough to measure this thrust is also affected by
background vibrations, propellant flows, and even small temperature changes.
One challenge of measuring milli-Newton or smaller forces is the background
vibrations in a laboratory or spacecraft.
The weight of an electric thruster can be one
thousand to one hundred thousand times the thrust it produces. With this sort of inertia, even
small vibrations produce effects on the same order of magnitude as the engine thrust.
Gravity causes additional complications. Since the engine's weight is so much larger
than the engine's thrust, the two forces must be separated. This is usually accomplished by
measuring thrust in a horizontal plane, perpendicular to the effects of gravity. Some thrust
stand concepts, such as an inverted pendulum, make use of gravity to increase sensitivity.
This is described further in section 2.4.
As mentioned in section 2.1, small force thrust stands require an extremely sensitive
flexure to hold the floating structure. Anything else that crosses this interface will add to the
stiffness of the flexure. Most engines require fuel lines, and wiring for power or sensors.
These extra connections not only add to the flexure's stiffness, but also change its properties.
One important addition is hysteresis. While a flexure will return to its original position as
long it is not plastically deformed, the addition of multiple wires and hoses adds an element of
friction. Even with the engine shut down, this friction can cause the thrust stand to register a
non-zero force.
Another result of a sensitive flexure is that it cannot transfer a great deal of heat.
Since electric thrusters operate in vacuum, heat transfer is limited to conduction and radiation.
Radiation is only effective for large temperature drops, and conduction through the sensitive
flexure is limited, so the thrust stand is susceptible to signific,ant temperature gradients as
engine heat builds up. This can cause misalignment of components across the interface, such
as the displacement sensor and force actuator. Thermal expansion can cause displacements
on the same order of magnitude as those produced by the engine's thrust.
14
2.3
Thrust Stand History
Thrust stands to measure milli-Newton and micro-Newton forces began to appear in
the early 1970's to test emerging electric propulsion technology. The most well documented
of these is the Micropound Extended Range Thrust Stand (MERTS) produced at NASA's
Goddard Space Flight Center.
For decades it remained the most sensitive instrument to
measure impulses from pulsed plasma thrusters (PPTs) (5). PPTs, like many other electric
thrusters produce thrust with repeated pulses of propellant. To fully characterize this engine,
the thrust stand must be able to measure the impulse of the individual pulses as well as the
average thrust. MIERTS pioneered the torsional balance concept (see section 2.4) to measure
forces in the 50 ptN range with a I ptN resolution. It made use of both displacement and null
balance operation to accommodate a wide range of engine thrust. The null balance feedback
loop also provided damping (7).
A few years later Farichild Republic Co. developed a thrust stand for the purpose of
testing PPTs. Also a torsional balance concept, this thrust stand could measure individual
pulses and average thrust in the 200 ptN range. It relied on an oil filled fluidic damper to
dissipate oscillations (1).
In the late 1980's Thomas Haag developed a thrust stand at NASA's Lewis Research
Center.
This stand differed from previous models in that it was designed to test
magnetoplasmadynamic (MPD) thrusters with high powers up to 100 kW. The large amount
of waste heat required a supply of cooling water to the engine. This design utilized the
inverted pendulum concept to increase sensitivity. Background vibrations were not as big an
issue since it measured large forces on the order of 1 N.
Nevertheless, a long 150 cm
pendulum arm ensured that deflections from engine thrust would be much larger than
background vibrations or thermal drift.
Like the MERTS, electronic feedback provided
damping (2).
Thomas Haag produced another thrust stand in 1994. This one used the common
torsional balance concept to measure PPT thrust around 500 piN. At a mass of 7.5 kg, the
engine presented a miniscule 10-5 thrust to weight ratio. Small ratios such as this are more
common to pulsed engines than to steady state engines. The design incorporated electronic
feedback damping that could be activated for average thrust measurements and shut down for
measurements of individual pulses.
Despite the presence of a feedback loop, thrust was
15
determined from displacement measurements, not null balance.
Like the MPD thrust stand,
this design required a leveling mechanism to eliminate drift from gravitational effects (5).
Researchers at the University of Illinois at Urbana-Champaign set to construct a
durable, compact thrust stand in the late 1990's.
Their stand, intended for PPTs, could
support a engine mass of 50 kg and measure thrust in the 150 pN range. They chose a longperiod pendulum concept (see section 2.4) to save space and avoid the counterweight mass
required by a torsional balance concept. In exchange the thrust stand required a vibrationally
isolated platform to reduce background noise. Thrust was determined from displacement, and
damping from electrical wiring precluded the need for any electromechanical feedback (3).
In 2001 a team for USC published their design of a nano-Newton thrust stand (nNTS)
with demonstrated measurement of 90 nN and an estimated accuracy of 15 nN. At the time
this represented an improvement of about twenty-five times over existing technology. This
torsional balance design measured thrust via displacement.
For fine measurements, the
displacement sensor was attached at a distance of 60 cm from the pivot to amplify minute
rotations. The team used an oil bath both for viscous damping, and as a means to transfer
propellant across the balance arm interface without any mechanical contacts (6).
2.4 Design Concepts
While there are a great number of existing thrust stands, the majority can be grouped
by design concept into four major categories; inverted pendulum, long-period pendulum,
torsional balance, and electromagnetic. See reference 7 for additional concepts (7).
The inverted pendulum is a popular design because it is simple and it makes use of
gravity to increase sensitivity. The engine is mounted at the end of a long arm and it fires
perpendicular to this arm ( Figure 1). A small disturbance caused by the thruster is magnified
by gravity to produce a measurable displacement. For a regular pendulum of length I and
with spring constant k at its pivot, displacement is proportional to the applied force F:
d
F2
k
(1)
The sensitivity of the stand is limited by the spring constant of the pivot. This can
only be reduced so much before the pivot can no long hold the mass of the thruster. When the
effects of gravity are considered the sensitivity is reduced even further.
16
For the same
pendulum in a normal, stable configuration with a thruster of mass m, the displacement is
described by:
d=
F
2
k + mgl
(2)
It is evident that now the sensitivity is limited by a combination of the spring constant
and a gravitational force. The inverted pendulum applies the force from the pivot and the
force from gravity against each other to increase sensitivity. For the same pendulum and
thruster mounted upside down, the displacement is described by:
d=
F
2
k - mgl
(3)
Now the sensitivity of the thrust stand can be increased to the point of instability by
matching the two terms in the denominator (2).
A long-period pendulum uses a combination of linkages to produce the effect of a very
large pendulum in a compact package.
This is obviously more complex than a simple
pendulum, but is required for impulse measurements where the period of the thrust stand must
be longer than the duration of an impulse. There are several possible configurations, one of
which is illustrated below. Two linkages of length R are connected by pivots. The engine is
mounted on this connection bar with specific attention to the location of the overall center of
mass. For small displacements, the engine moves as if it were mounted on an equivalent
simple pendulum of length Rs.
R,=
R
(4)
17
F
1
1Ii
g
R
Xcm
k
Figure 1: An inverted pendulum uses
gravity to increase sensitivity.
Figure 2: A long-period pendulum behaves like
a large pendulum, but fits in a compact package.
An electromagnetic thrust stand concept strives to further reduce vibrational noise by
eliminating mechanical contact between the engine and the fixed base structure. The engine
is levitated by electromagnetic forces and thrust can be determined from the force required to
do this. One concept built at the Cork Institute of Technology for measurement of mass is
illustrated in
Figure 3. An iron core is energized by an alternating current of magnitude I
and frequency (o. The resulting magnetic field exerts a force on a conducting ring attached
below the engine. This levitating force is proportional to the current, frequency, and area A
enclosed by the conducting ring [15].
F oc A 2 I 2 W
(5)
Only a limited number of thrust stands have utilized this electromagnetic concept, and
those few only emerged in recent years. Nevertheless, the concept has good potential for
future use.
The most popular thrust stand concept is a torsional balance. This concept allows an
arm to swing freely around a pivot in its center. The engine is placed at one end of the arm,
and a counterweight of equal mass is placed at the other end. With its mass perfectly centered
on the axis of rotation, the stand is insensitive to all linear vibrations and two of the three
components of rotational vibrations. Even during practical operation, with the center of mass
slightly offset, vibration will cause much less noise than a pendulum type concept. As noted
by Haag, this concept is "inherently more stable than an inverted pendulum arrangement" (5).
18
In addition to its favorable vibration response, a torsional balance is also unaffected by
gravity.
With its mass properly balanced, thrust stand performance is identical in any
orientation and even in zero gravity. For an end to end arm length 1, end masses m, and pivot
spring constant k, the displacement is described by:
F1 2
(6)
d =Fl
4k
B
B
I
Figure 3: Current in the ring, induced by Bz,
interacts with Br to produce a force.
F
Figure 4: A torsional balance relies on a counterweight to reduce vibrational noise.
19
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
20
3 THRUST STAND DESIGN
The ETEEV thrust stand design and analysis focused on mechanical and thermal
performance. Mechanically, the thrust stand is designed to flex under the smallest of forces
but not break, even under severe loading. Thermally, the thrust stand is required to support a
hot thruster and conduct away waste heat.
This is accomplished without distorting the
precision positioning required for force measurement. Once the thrust stand was assembled, it
could be integrated with a controller, allowing smooth operation and precise force
measurements.
3.1
Initial Requirements
The basic goal of this project was to design a thrust stand capable of measuring force
to a resolution of 100 pN and able to survive mechanical loading from a Space Shuttle launch.
Requirements that heavily influenced the design are described below. Refer to Appendix A
for a complete list of requirements.
During nominal operation, the BHT-200 produces a force of about 15 mN. It was
desired to measure this thrust with an accuracy of one percent, resulting in a requirement for
100 pN resolution. Additionally, we required the stand to operate anywhere in the range from
0 mN to 30 mN to allow for a variety of operating conditions and to provide some flexibility
for the use of a different engine.
There was no requirement to measure impulse from
individual pulses (see section 2.3) as the thruster is only expected to operate with steady state
electric propulsion.
The desire for on-orbit operation required that the thrust stand be able to survive
launch loading and be able to operate in an orbital environment. Design requirements for
Space Shuttle Hitchhiker payloads are defined in the "Shuttle Small Payloads Customer
Accommodations & Requirements Specifications (CARS) Document" [8].
The document
defines load factors that payload structures must be designed to withstand. The load factors
are eleven g's linear acceleration and eighty-five radians per second squared angular
acceleration. These loads should be analyzed along all three axes, positive and negative,
simultaneous, and in all possible combinations [8]. Any mention herein pertaining to survival
of launch loads refers to these loading conditions.
21
Operation in an orbital environment also set a requirement that the thrust stand
perform measurement in zero gravity. Due to the need for ground testing, we additionally
required the thrust stand to operate in zero gravity and one gravity with similar characteristics.
It was difficult to define thermal requirements for the thrust stand as they depend on
the specific flight. Space Shuttle payloads can experience a variety of thermal environments
based on sun-facing, earth-facing, or deep-space-facing attitudes. The CARS document notes
that Hitchhiker payloads usually rely on multilayer insulation and passive radiators for
thermal control. It states clearly that electric heating can be provided, however no heat may
be dumped into the Space Shuttle structure [8]. This indicates that all excess heat from the
ETEEV experiment must be radiated away. The scope of the thrust stand project does not
include ETEEV thermal control, however the two are heavily intertwined. Basic thermal
specifications for ETEEV had to be defined in order to understand how the thrust stand would
interact with them.
Nevertheless the thrust stand thermal requirements could be defined with only a
limited idea of ETEEV's thermal control. Except for the engine itself, the thrust stand would
be protected from radiation by some sort of cover, most likely multilayer insulation. Its only
form of heat transfer would be conduction to a constant temperature base plate. This would
allow consistent operation in a variety of spaceflight and laboratory environments.
The
requirement therefore stated that the thrust stand must be able to conduct any excess heat
through its base into a constant temperature base plate. We defined that this base plate shall
maintain, by means of some external thermal control, a temperature between twenty-five and
thirty-five degrees Celsius.
3.2 Design Selection
Consideration was given to each of the four major thrust stand concepts described in
section 2.4. While the final selection was based on all the requirements described above, only
three of these directly drove the design decision. They were the requirements for operation in
a vibrational environment, survival of launch loading, and the ability to function in both zero
gravity and one gravity environments.
Of these, the requirement for good vibrational
response was considered the most important.
Literature from past thrust stand projects
indicated that this factor imposes a fixed limit on measurement resolution.
22
The deciding factors for each concept are described below. Refer to Appendix A for a
detailed comparison.
A long-period pendulum concept was eliminated early due to its unnecessary
complexity. The long period is not required for steady state thrust measurements, and the
concept has no other particularly favorable qualities to compensate for this added effort.
The inverted pendulum is a simple design and has the capability to sustain launch
loading. Nevertheless, it has an inherently poor response to vibrations due to the fact that it
positions the engine mass so far from the pivot. Another negative trait is its dependence on
gravity to increase sensitivity. The pendulum's characteristics would change when operated
in zero gravity.
An electromagnetic design provides better response to vibration, however it requires
special procedures to survive launch loading. NASA is unlikely to allow engine levitation
during launch, especially if electrical power is required to do so.
Instead, a mechanical
stowing device would have to clamp the engine. The concept was eliminated due to this
added complexity. An additional factor was the limited number of existing designs from
which to draw upon.
A torsional balance was the only concept to satisfy all three requirements. With the
engine mass properly balanced, it is less affected by vibrations and requires less structure to
survive launch loading. Additionally, mass balance greatly reduces the effect of gravity on
the thrust stand's operation. These qualities, especially vibration response, explain why the
torsional balance is so often used. A torsional balance concept was therefore selected as a
basis for the thrust stand design.
3.3 Design Overview
The thrust stand is composed of two parts; a rotational balance arm, and a fixed base.
The balance arm consists of a square aluminum bar forty centimeters long. It is attached to
the base by way of two flexural pivots. The engine is mounted at one end of the arm, and a
counterweight of nearly equal mass is mounted at the opposite end. The thrust stand is
illustrated in Figure 5 and Figure 6 in its thermal test configuration, without the engine or
counterweight mounted. The opposite end also houses components for position sensing and
balancing force application. The two pivots are mounted at the center of the arm and allow it
23
to rotate about their common axis. Aside from electrical wiring, they are the only mechanical
contact between the balance arm and the fixed base. Their mechanical characteristics and
limitations are described further in section 3.4.
The fixed base consists of a mounting plate to hold the pivots, and four legs extending
both above and below this plate. These legs allow the thrust stand to be positioned upright as
shown in Figure 6, inverted, or on its side. The thrust stand was tested in each of these
positions, however vacuum chamber dimensions dictate that final operation will occur on its
side. The legs and mounting plate have a large cross section to allow easy heat conduction
into the base plate.
mounting plate.
The fixed base also includes two sheaths that are connected to the
They surround the balance arm to isolate it from the external thermal
environment and allow for radiative cooling as described in section 3.5. Mechanical stops
inside the sheaths limit rotation of the balance arm to a one degree arc.
The thrust stand operates in a null balance mode, using feedback control to maintain
zero position and damp oscillations. Engine thrust is determined from the required nulling
force. Components and specifications of the controller are described in section 3.6.
3.4 Mechanical
Many design requirements for the thrust stand were driven by the need to survive
launch loading during the ETEEV mission. This mission however, was only one of several
intended applications for the thrust stand. It is expected to spend time both before and after
the ETEEV mission serving as a much needed ground based thrust stand at MIT's Space
Propulsion Laboratory. During the course of the project, this ground based application took
over as the driving application.
About one year into the project the design focus shifted to allow early fabrication the
thrust stand. The new goal was fabrication, assembly, and testing of a ground thrust stand
based on the core spaceflight design developed up to that point. This stepping stone approach
would allow the design to be verified at a low cost. Operational problems could be identified
early and solutions applied to the final design of flight hardware. In addition, this would
provide the laboratory with a functioning thrust stand while the flight version was still being
developed. It is important to stress that the flight version would be a modification of the
ground thrust stand, not a redesign.
24
2 coaxial
displacement
sensor
pivots
engine mounts
here
voice coil for
force feedback
sheath for thermal
isolation and cooling
Figure 5: The stand consists of a rotational balance arm and a fixed base.
Figure 6: The assembled thrust stand in its thermal test configuration.
Figure 7: The counterweight is situated so that the center of mass is aligned with the pivot axis.
25
With the in-flight breakup of the Space Shuttle Columbia, and impending restructuring
of STS payloads, the ETEEV experiment and its requirement for a spaceflight thrust stand
were delayed indefinitely.
Therefore, while the core design of the thrust stand remains
capable of flight, there are currently no additional plans to design beyond the required
capability of a ground thrust stand. This section details that core design. Refer to Appendix
B for some of the possible modifications to qualify the thrust stand for space flight.
The core of the thrust stand, and the part that has been designed to withstand launch
loads, is the pivot and balance arm. The rest of the thrust stand consists of a supporting box
and components built around this core.
The fixed base and balance arm are linked by two Lucas Free-Flex@ pivots. A major
factor in the success of this design, the pivots employ three thin flexures inside a hollow shell
(Figure 8).
This allows rotational motion along one axis yet provides stiff resistance to
translation or rotation along any other axis. In addition, since there are no moving parts,
friction and hysteresis are eliminated as long as the pivot is operated in its elastic regime. The
thrust stand has mechanical stops to prevent rotation of the balance arm beyond one degree,
well within the pivot's range of motion.
The choice of pivot spring constant
and balance arm length involves a trade off
between sensitivity and loading.
Pivots
with a small spring constant give the thrust
stand good sensitivity, but they cannot
Figure 8: The pivots utilize thin
flexures for rotation.
support the defined launch loading conditions.
support a very large load. The goal is to
select the most sensitive pivot that can still
Similarly, a long arm provides good
sensitivity because it gives the engine thrust a long moment arm. By the same token, it gives
the engine mass a long moment arm during launch loading, producing large loads on the
pivots.
26
The optimal arm length can be determined by examining the relation between
sensitivity, loading, and arm length. A force F applied at a distance I from the pivot will
cause a rotation.
0-F * 1
7
k
where k = pivot spring constant
For a constant force, angular displacement increases linearly with arm length. This
gives the stand better sensitivity. Loading conditions, especially angular acceleration make a
long arm less desirable. Since most of the balance arm mass is located at the two ends, it has
a large moment of inertia. Angular acceleration of this inertia will produce large off axis
loads on the pivots. For arm length I with masses m located at the ends, the force produced at
the pivots is described by:
F = ccml
2*d
(8)
where
a angularaccelerationduring launch
d = distance separatingthe two pivots
The force exerted on the pivot increases with the square of arm length. Given that
sensitivity increases linearly with arm length, and applied load increase with the square of arm
length, the arm was designed to a relatively short 40 cm end to end.
The engine and supporting hardware are estimated to have a mass of 1.5 kg.
By
design the counterweight would have an equal mass. These masses at the end of a 40 cm
balance arm produces a torque of 12.9 N*m during launch loading. This large torque is
accommodated by spacing two pivots 5 cm apart.
In this configuration the pivot will
experience a maximum load of 600 N in its radial direction.
The final configuration mounts two Lucas Free-Flex model 5024-600 pivots with their
axes aligned. The pivots can support a force of 1400 N each in the radial direction. The
combined spring constant is 5200 N*mm/rad. The spring constant may vary with changes in
radial loading, however by operating in null balance mode, force measurement is not directly
affected by spring constant.
27
Because it must be supported by the sensitive pivots, the balance arm and components
mounted on it are kept to a low mass. Configuration of the arm itself is driven by natural
frequency.
The NASA CARS document states that all structures are required to have a
natural frequency above thirty-five hertz. A higher natural frequency is preferable as any
component with a calculated natural frequency below one hundred hertz must have this
verified by test [8]. With its long cantilever configuration, the balance arm is particularly
susceptible to low natural frequencies.
The arm requires a large cross section and area
moment of inertia to remain stiff, yet its weight must be kept to a minimum. The solution is
stock 1% inch square hollow tubing. This provides a stiff cross section, low weight, and
because of its standard size, low cost. With this cross section, a 20 cm cantilever beam with a
1.5 kg mass at its end has a natural frequency of 140 Hz.
f
1
2ff
=1-
3EI
l(m +0.24mb)
(9)
(9
Stress in the arm is not a significant factor given the wide cross section required for a
suitable natural frequency. Including linear force and torques, a maximum stress of 20 MPa
occurs at the center of the balance arm.
Stress concentrations from mounting holes may
increase this value, but it still remains well below the yield stress of aluminum.
A final component that experiences high stress is the engine mount. It is purposefully
designed as a spindly structure to limit heat transfer into the balance arm. The design is
discussed in detail in section 3.5.2 as it is driven by both mechanical and thermal
considerations.
3.5
Thermal
The BHT-200 engine is expected to operate at a maximum temperature of one hundred
and sixty degrees Celsius.
It is designed to radiate away all waste heat.
Nevertheless,
because it must be mechanically mounted, some amount of heat will always conduct into the
structure. In the case of the thrust stand, this structure is the balance arm.
Heat from the engine must flow through the engine mount, down the balance arm,
through the pivots and their mounts, and into the thrust stand base. The base is thermally
grounded and can be assumed to remain at the base plate temperature of 30"C. A good model
28
for this scenario would be a chain of thermal resistances connected in series between a
temperature reservoir at 160"C and another reservoir at 304C. Each element experiences a
temperature drop based on its thermal resistance. The more resistive elements experience
larger temperature drops. In fact, this sort of resistive network is utilized in section 3.5.1 to
further analyze the heat flow.
Heat Stop (insulator)
Main thermal block. Separates high
temp thruster from low temp arm
Pivot Mount (insulator)
Final barrier to prevent heat
flow through the pivot
Pivot
Arm (conductor)
Remains at uniform temperature
to prevent thermal drift
Temperature gradients
may cause distortion
Radiation
Main source of heat dissipation
from the arm
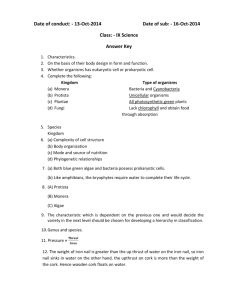
Figure 9: Heat escapes from the balance arm by a combination of conduction and radiation.
The engine mount is the first of these elements, and it is designed to have a high
thermal resistance. Its goal is to limit heat from entering the balance arm in the first place.
For this reason it is referred to as the heat stop. Nevertheless, some heat will leak into the
balance arm, and from this point on the pivots are the only element with any significant
thermal resistance.
We should expect a large temperature drop across the heat stop,
essentially uniform temperature through the aluminum balance arm, and then another large
temperature drop across the pivot. This is confirmed by the thermal simulations shown in
Figure 11.
There are two potential problems with the heat transfer described here. The first
problem results from the balance arm and base structure reaching different temperatures at
steady state. The balance arm, at a higher temperature, will expand. Since the thrust stand
relies on position measurements of less than 1 ptm to operate successfully, this uneven thermal
expansion could cause the thrust stand to register a drift force. Fortunately this problem can
29
be eliminated with a proper design. The position sensor and pivots are both mounted on
balance arm's central plane. These two components will remain in the same position relative
to the fixed base even as the rest of the arm grows around them.
The second problem is caused by a temperature drop across the pivot, notated ATP.
One side of the steel pivot will get hot, the other side will stay cool, and the temperature will
change significantly through the flexures. Inside the pivot, three thin flexures span the gap
between two rigid cylinders.
If the flexures and cylinders expand at different rates, a
deflection is likely to occur. For example, if the flexures are heated they will become too long
to fit inside the rigid cylinder. In this unstable configuration, the flexures are likely to deflect
to one side to make room for any extra length. The resulting deflection of the balance arm
would falsely register as a force input.
This effect was difficult to model or calculate. The pivot's intricate geometry caused
difficulty determining in which direction and at what temperature the flexures would deflect.
Therefore for early design it was assumed that the pivot could sustain a ATP of up to five
degrees Celsius before it deflected enough to distort force measurements.
3.5.1
Modeling the Heat Flow
The goal of thermal analysis was to direct heat flow through the thrust stand in such a
way as to minimize ATP. The heat flow scenario was an ideal case for a resistive network
model (Figure 10). In this model, the engine is fixed at one hundred and sixty degrees Celsius
and the base is fixed at thirty degrees. Four elements connect these two extremes; the heat
stop, balance arm, pivot mount, and pivot. Each of these elements has a thermal resistance
based on its geometry and material composition.
AT1
q -T
R
R=
A*k
(10 & 11)
where q = heat flow (W)
A = cross-sectional area
k = thermal conductivity
Given these conditions, the model outputs the amount of heat flowing through the thrust
stand, as well as a temperature drop across each element.
30
ARM
R = 1 *C/W
qTOT
PIVOT
Figure 10: The thrust stand is modeled as a resistive network.
We simulated various configurations with the goal of minimizing ATP.
Figure 11
shows results of the initial configuration. The heat stop is composed of an insulating material,
the pivot is steel, an all other components are aluminum. As expected, large temperature
drops occur at the heat stop and pivot. This configuration produces a ATP of seventy degrees
Celsius, almost certain to cause distortions.
Table 1: Thermal Conductivity (W/m*K)
6061-T6 Aluminum Alloy
167
420 Stainless Steel
25
Mykroy-Mycalex 410 Ceramic
0.5
Ti-6Al-4V Titanium Alloy
6.7
3.5.2 Heat Flow Solutions
Figure 11 and Figure 12 illustrate a number of configurations that will reduce ATp.
One effective way to reduce heat flow through the pivot, and therefore AT,, is to
provide another means for heat to exit the balance arm. If the balance arm is surrounded by a
cool surface it can transfer heat by radiation. The sheaths shown in Figure 5 completely
31
surround the balance arm and they are well grounded to the base temperature of thirty degrees
Celsius. Application of a radiative coating allows significant radiation heat transfer from the
balance arm.
Radiation is a function of temperature to the forth power, but it can be linearized to
better integrate into the thermal model.
q
AT
R
R
R =
2-6
4* A*0-*r*
(12 & 13)
TBS
HEAT
STOP
ARM
PIVOT
MOUNT:'
PIVOT
60-
Baseline (with radiation)
50
Temp
(C)
Temp
(C)
40
Config 1
Config 2
0
0.05
0.1
0.15
Distance from pivot (m)
Figure 11: Radiative cooling removes a great
deal of load from the pivot.
0.2
30'
0
0.05
Config 3
0.1
0.15
0.2
Distance from pivot (m)
Figure 12: Heat reduction by:
Config 1 - Reduce heat stop area 70%
Config 2 - Increase radiator area 30%
Config 3 - Reduce sheath temp by 5*C
The addition of radiation to the model has a dramatic effect. With a black anodized
surface, the aluminum balance arm would have an emissivity of 0.85. This alone reduces AT,
to a more reasonable twenty degrees.
Radiation cooling relieves the pivot's heat load, but AT, is still higher than desired.
More radiation will improve the situation, and to do that we need more radiation area or a
larger temperature difference between radiating surfaces. The balance arm surface area can
be increased about thirty percent by widening it and adding short cooling fins. The added
area increases radiative heat transfer to further reduce ATP. Configuration 2 in Figure 12
32
illustrates the outcome of this setup. A drawback to this extra area is additional mass that the
pivots must support. Also, the cooling fins are extra parts that add to total cost.
The other method to increase radiation is to create a larger temperature difference. We
need to increase the temperature of the balance arm, where radiation occurs, without
increasing ATP. An insulating pivot mount will keep the pivot from experiencing the larger
temperature drop required for good radiation heat transfer.
Tarm - Tbase =
ATp + ATpiot mount
(14)
Unfortunately the pivot mount is a bad place to put an insulator. This area of the
thrust stand experiences the highest stresses and insulators generally have poor mechanical
properties.
This solution is possible but should only be employed if no other option is
available since it will require extensive design and non-standard materials.
The opposite approach generates a larger temperature difference by cooling the sheath
instead of heating the balance arm. Active thermal control could maintain the sheaths at a
lower temperature than the base structure. More heat would radiate from the balance arm,
reducing arm temperature and ATP. Configuration 3 in Figure 12 shows that ATP drops to less
than two degrees if the sheaths are cooled.
Like the previous solutions, this will add
complexity and cost to the system, by requiring coolant pipes, a pump, and a heat sink.
Direct, active cooling of the engine was considered as a solution. For example, water
could be circulated near the base of the engine. Again this is undesirable because it requires a
heat pump and/or heat sink. In addition cooling pipes would now cross the sensitive interface
between the balance arm and fixed base. The thrust stand is designed to operate with electric
thrusters in the two-hundred watt range. Judging from previous thrust stand designs, this
power lies near the upper limit for what can be passively cooled. It should be possible to
passively cool the balance arm for less complexity that would be required by active cooling.
The baseline configuration shown in Figure 11 utilizes a simple heat stop. It is
composed from standard insulating materials and has a large enough cross section to
minimize mechanical stresses. During thermal analysis we determined that we could get
better performance from the heat stop. It needs to separate the hot engine from a cool balance
arm yet still be able to support the engine during launch loading. Configuration 1 in Figure
33
12 shows a temperature drop of one hundred and twenty degrees Celsius across the heat stop.
This case would be ideal because it limits all significant thermal gradients to one component.
The characteristics required from this heat stop require a precisely designed part
fabricated from non-standard materials. An insulator is actually not a good material for this
application. Because of their low strength, a large cross sectional area is required to limit
stress. This negates any advantage gained from their low conductivity.
A high strength
material with a small cross section produces a better result. The most likely candidate design
therefore employs titanium struts.
Titanium alloys have conductivities of less than 10
W/m*C, much lower than aluminum and about half that of steel. In addition, its superior
strength, greater than 700 MPa, allows minimal cross sectional area for conduction.
The
proposed configuration requires three hollow titanium columns only three millimeters in
diameter and ten millimeters in length.
The concept is shown in Figure 13.
These small diameter titanium
rods
would
provide
the
required
temperature drop and they could survive
all required stresses. Between material
procurement and precise machining, this
heat stop would constitute a majority of
the overall manufacturing costs.
Methods to reduce AT, exist, but
Figure 13: Thin titanium rods separate the
they are complex and costly. None of
them can be justified based on the
hot engine from the aluminum balance arm.
starting assumption that AT, remain
below five degrees. With these solutions defined the next section attempts to clarify what is
the maximum allowable ATP. That knowledge will decide which of these proposed solutions
are required and whether or not it is worth the cost.
3.5.3 Testing the Flexures
The goal at this point was to determine how large ATp could get before the pivot
distorted.
34
Several methods were available, but none provided the desired solution.
The
pivot's complex shape prevented any useful conclusions from analytical calculations. Lucas
Aerospace, the manufacturer, could not supply any information about how the pivots behave
when subject to a temperature gradient. Finite element analysis of the pivot was considered.
Although, this would have helped explain the behavior, it would also have taken a good deal
of time to do so.
At this point in the project a majority of the design was ready for fabrication. Therefore
a basic core was built to test the thermal capability of the pivots. Even though this thermal
test would take more time than finite element modeling, it would advance other aspects of the
assembly and checkout. Those parts required for the test such as the base, balance arm, and
sensing components would not change as a result of the test. Expensive parts that depended
on the test results would be designed after the test and added to the core to produce the ground
based thrust stand.
Besides a thermal test, this early assembly would be used to troubleshoot thrust stand
operation. For example, testing of the control and data acquisition circuitry required physical
connection to the thrust stand.
To save time and money, each stage of the thrust stand would have only the minimum
required capability. The first version would exclude the engine, heat stop, and counterweight.
It would operate in air at normal atmospheric pressure to avoid the time consuming pumpdown periods in a vacuum. Additionally, radiation cooling would not be included. After
sufficient testing in air, the second version would be set up in a vacuum to expose it to more
realistic operating conditions.
At this point a radiative coating would be applied to the
balance arm and sheaths. At the conclusion of thermal testing, the engine, heat stop, and
counterweight would be added to the final version: the ground based thrust stand.
An electric heater was mounted at the end of the balance arm to simulate heat flow from
the engine.
The expected thermal flow and sensor locations are illustrated in Figure 14.
Temperature is monitored at three locations during the thermal test. This is accomplished
with precision thermistors that change resistance with temperature. A thermistor is mounted
on each side of the pivot to give an accurate reading of the temperature drop it experiences. A
thermistor is also mounted at the end of the arm near the heater. A large temperature drop
along the length of the balance arm indicates heat loss due to convection or radiation.
35
The sheaths, designed for radiation cooling, conveniently provide protection from
convective currents during operation in air. A convective flow past the heated balance arm
could easily produce a drift force. By placing sheaths around the balance arm with only a 1/8
air gap, this convection is essentially eliminated. Any openings for sensors or actuator are
covered as much as possible.
T
Heater
Sheath restricts
convection
Thermistor location
Figure 14: The test configuration uses aluminum components.
Insulators may be added if required.
During the test, the controller is set to maintain the null position. The required nulling
force is monitored. Heat is added in increments allowing time in between for the thrust stand
to reach steady state. During this process the arm temperature will grow and at a particular
temperature, the applied nulling force is expected to drift. The goal is to determine at what
temperature drift occurs, and whether or not it is repeatable in different configurations.
In addition to determining this limit temperature, the test will quantify thrust stand
behavior above the limit temperature. If the drift force occurs in a predictable manner it can
be factored out from force measurements. The test will continue until the arm temperature is
twice that at which a drift force is first detected.
This allows a good range of data to
determine a relation between temperature and drift force.
The test cycle is performed in various orientations to highlight the effect that initial
loading has on thermal distortion. Three orientations will be tested; upright, inverted, and
sideways.
36
3.6 Feedback Control
While a torsional balance design is inherently insensitive to vibration, during physical
operation the thrust stand is going to experience a number of disturbances.
Force
measurement will not be affected as long as these disturbances are damped out.
Because of its flexible, virtually-friction-free pivots, the balance arm has no natural
damping and it oscillates for several minutes if disturbed. Therefore active damping is added
via feedback control to a force actuator. With this system disturbances are damped out within
a matter of seconds.
The controller would include position control as well as damping. This allows the
thrust stand to operate in null balance mode.
A control force, equal and opposite to the
engine's thrust, is applied to maintain the null position. Force measurement is determined
from the control signal applied to the force actuator.
Null balance mode requires less
calibration since the current-to-force relation remains constant. This applied force will be
equal to the engine's thrust regardless of configuration or orientation.
Additionally, null
balance operation eliminates any variations in spring rate from the force measurement.
Position sensing is accomplished with a sensitive linear variable differential transducer
(LVDT). The sensor provides non-contact position measurement with and does not apply a
significant force to the balance arm. There are other types of position sensors that also meet
these goals, such as a variable capacitor, strain gauges, and light reflection. However, the
LVDT is simple, widely available, and provides a linear position/voltage relation that easily
integrates into the position control system.
The Schaevitz 050 DC-EC LVDT outputs a
voltage linearly related to displacement over a range of 2.5 mm. It has a sensitivity of eight
volts per millimeter, which combined with a digital resolution of five millivolts results in
position knowledge to within roughly 500 nm. The LVDT is positioned at the end of the arm
where displacement is the largest. It is positioned on the opposite end from the engine to
minimize electromagnetic interference.
Force application is provided with a BEI LA1O-08-OOOA voice coil. The coil provides
a non-contact force of up to six Newtons.
The voice coil is mounted opposite from the
engine, about 10 cm away from the pivots. Since the voice coil has a shorter moment arm, it
must produce twice as much force as the engine to null the trust stand. This allows a greater
resolution in force measurements.
37
To simplify the design process, feedback control is supplied by a commercial unit
available at the laboratory. This eliminates time consuming design, analysis, and testing of a
custom analog controller. The Galil DMC-2020 is a two-axis controller with capability for a
variety motion control, and analog inputs for feedback.
These capabilities exceed our
requirements, however it is available at the lab so the extra performance will go unused. A
position signal from the LVDT is connected to the analog input, which has an analog-todigital resolution of five millivolts.
The null position is maintained with PID control.
Damping is obviously required
since that thrust stand has none of its own. Integral control is required because it allows the
controller to maintain zero position with a steady state disturbance. On the thrust stand, this
steady state disturbance is engine thrust.
The Galil controller is accompanied by a Galil CPS-15-40 amplifier. It is powered
from a standard AC wall outlet and provides up to five hundred watts with a forty volt signal.
Again this is more than required for the thrust stand, but it is easily scaled down.
The
amplifier utilizes twenty kilohertz pulsed width modulation (PWM) to produce a signal that
oscillates between zero and forty volts. Its high power presented good potential to burn out
electronics and the voice coil during testing. Fuses are therefore included to limit current
flow to one half of an ampere.
A PWM amplifier operates by adjusting the duty cycle of is oscillating forty volt
signal. The balance arm has enough inertia to average this oscillating input so its position
remained steady. However, force measurement requires capture of a steady current signal.
Additionally the alternating forty volt signal produced a troubling EMI environment that
distorted other signals from the thrust stand, including output from the LVDT.
An RC filter was mounted at the amplifier output to average the signal. This filter
output a DC signal to power the voice coil. The complete circuit is illustrated in Appendix A.
An added feature of this RC network was power dissipation.
As previously
mentioned, the amplifier can produce much more power than the thrust stand requires. A
direct connection would required the PWM to operate at less than one percent of its available
output.
PWM amplifiers are not very stable when operating is this regime, and steady
operation is required to accurately determine the balancing force. The RC network provides a
38
resistance of one hundred ohms to dissipate about ninety percent of the output power. The
remaining ten percent produces a force in the voice coil.
39
Wr
-
--
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
40
- -V
-
__
-
-
-
----
-
__
4 OPERATION AND PERFORMANCE
Initial thrust stand tests were aimed at characterizing its operation. First the thrust
stand was calibrated and balanced. These procedures were performed in air to save time. The
next set of tests identified the thermal response of the thrust stand. Several of these tests were
run in air to identify rough trends. Final thermal tests were performed in vacuum to best
simulated actual operating conditions.
4.1 Sensitivity
Thrust stand calibration is required only once as long as the voice coil and driving
electronics are not altered. During operation, the recorded value is a voltage drop across a
seventy-five ohm resistor. This value is multiplied by a series of factors to yield current flow
through the voice coil, force applied by the voice coil, and force applied by the engine. The
formula is described below:
F
-) * Kvc * 'vc
R
(15)
Ir
where
V
=
measured voltage
R
target resistor ( 75 Q)
Kvc = voice coil force constant ( 3614 mN/A)
lvc = length, pivot to voice coil
F
IT
= engine thrust
= length, pivot to engine
Equation 15 describes an ideal operation. In the actual instrument there are two
deviations from this equation. First, the assumed scaling factors, such as the force constant or
seventy-five ohm resistance, will not be exactly as predicted. For this reason a correction
factor is included in the equation. As long as the voice coil and electronics do not change,
this correction factor will remain constant. The second deviation is that some voice coil
output will be required to maintain zero position even when the engine is off. This is referred
to as the offset. This force is subtracted from our calculations to yield the accurate applied
force. Equation 15 is modified for these two errors:
41
F = K*K-)*KyC*
R
C
(16)
-FOFFSET
1T
where
K
=1.07
FOFFSET ~ 100 mN
The two values were determined during the calibration run illustrated in Figure 15 .
The offset varies for each run due to thrust stand orientation, tilt, and component positioning.
Therefore, the offset is determined before each test by taking a measurement while the engine
is off.
The thrust stand was calibrated in its upright position. It will, however be operated on
its side so that the engine can fire down the longitudinal axis of the vacuum chamber. The
correction factor is independent of orientation, but the offset will change in this new
orientation. Calibration was performed by placing know weights onto the end of the arm.
Each weight had a mass of 209 ± 3 mg to generate a force of 2.05 ± 0.03 mN.
correction factor applied, force was calculated to within 0.1 mN of the actual force.
7.00
.-.-
Calculated
6.00
SActual
5.004.00
8
3.00
2.00 -
---
1.000.00-1.00
0.0
5.0
10.0
15.0
20.0
25.0
30.0
Time (sec)
Figure 15: Equation 16 calculates force with a maximum error of 0.1 mN.
42
35.0
With
A potential source of error during calibration comes from placement of the calibration
weights. A longer moment arm will produce the same effect as a larger weight. During thrust
stand calibration, all weights were positioned within ±2 mm of the intended location.
Assuming that the engine can also be positioned within these limits, maximum error from
positioning is 0.1 mN.
Combination of the positioning error and calibration error yields
overall thrust stand accuracy. The thrust stand is accurate and repeatable to within 0.2 mN.
The thrust stand does exhibit hysteresis. Effects on the order of about 0.1 mN are
evident in Figure 15.
Larger effects were measured, and appear to be the result of large
disturbances. Hysteresis appeared any time a disturbance was large enough to deflect the arm
significantly away from its null position. This can be attributed to friction, hysteresis in the
pivot, or integrator wind up in the controller.
In some instances hysteresis could be
eliminated by resetting the integrator. During testing, hysteresis generated a maximum error
of 0.5 mN.
Another aspect of calibration is mass balance in the arm. For a good vibrational
response, the balance arm's mass must be centered on the rotational axis. To balance the arm,
nulling force was measured in both the upright and inverted positions. A counterweight was
adjusted until these two were within 0.7 mN of each other. In this manner, the center of mass
is positioned within one hundred micrometers of the rotational axis.
While this sort of
positioning is possible, it may not be necessary. Before balancing, the center of mass was
offset roughly one millimeter. Measurement noise in this unbalanced configuration was not
significantly greater than after balancing.
The thrust stand has a resolution of 0.1 mN. This is limited by a data acquisition
resolution of 2.5 mV, and could therefore be reduced with better DAQ hardware. Overall, the
thrust stand was relatively insensitive to vibrations. It operated during business hours, in the
presence of a good deal of human and machine activity. During this period the measurement
noise was no worse than measurements overnight, when the laboratory is noticeably quite.
Operation in vacuum added a significant amount of noise, even while the vacuum pumps and
thruster were powered off. Since the vacuum setup requires long wires to reach vacuum feedthroughs, electromagnetic interference is the suspected source of this additional noise.
43
4.2 Sources of Thermal Drift
As noted in section 3.5.3, a major objective of this first build is to test thermal
characteristics for the final design. The thermal test provides information about steady state
temperatures throughout the thrust stand, the amount of heat that is conducted away from the
engine, and any drift forces that occur as a result of heat loads. It is important to determine
what internal temperature drops are allowable before the thrust stand exhibits a drift force.
This information will provide temperature ranges where accurate force measurement is
possible.
The first thermal test provides a rough picture of how the thrust stand responds to a
heat flow. Fifteen watts of heat is added to the engine mounting location on the balance arm.
This is several times larger than the maximum heat expected to leak from the engine. During
this heating, the thrust stand temperature and the required nulling force are both recorded.
The results are shown in Figure 16. The thermistor locations are outlined in Figure 14:
End Temp - At the end of the arm, next to the heater
Arm Temp - In the middle of the arm, next to the pivot
Base Temp - On the base, next to the pivot
The thrust stand experiences a drift force for even the smallest of temperature drops.
There is no limit temperature for the drift force, such as the ATP described in section 3.5. If
the thrust stand is subject to heat flow, a drift force will occur. If the cause of this drift force
can be determined, a design correction will solve the problem.
Otherwise the goal is to
quantify the drift force so that is can be removed during data processing.
There are several possible sources for the drift force. These possibilities are analyzed,
tested, and if possible corrected. This is a deliberate process, as the drift may be caused by a
combination of effects, so that the correction of one will only reveal the next largest source.
44
80.0
70.0~
60.0-
50.0-
40.0-
Upright
1XDrift-Eore
30.0 -
Inverted
-1XDriftForce_
20.0 10.0 -
4N-
N
Hanu
0.00.0
20.0
40.0
80.0
60.0
Time (min)
100.0
120.0
140.0
Figure 16: The thrust stand exhibits positive drift force regardless of orientation.
4.2.1 Center of Mass
For vacuum operation, the balance arm was assumed to settle to a uniform
temperature, even when transferring heat. This could be justified because aluminum has a
high conductivity, allowing it to transfer heat with only small temperature drops. Operation
in air however, presents a new problem. Now the balance arm loses heat to convection along
its whole length. This is evidenced in Figure 16 where the heater end of the arm is much
hotter than the center of the arm.
A result of this temperature gradient in the arm is uneven expansion in the arm. The
hot side expands more, shifting the center of mass in its direction. Expansion such as this
should generate a positive drift force when the thrust stand is upright. If the thrust stand is
inverted however, the drift force should be negative. Figure 16 shows that the drift force is in
a positive direction regardless of the thrust stands orientation. It is smaller in magnitude in
the inverted position. These results indicate that a center of mass shift may contribute, but not
45
more than 10 % of the overall drift. Additionally, its effect is expected to diminish during
vacuum operation.
4.2.2 Convection
Operation in air presents the possibility of another source of drift force. Convective
cooling along the arm's length applies an uneven force to the balance arm. The thrust stand is
protected from this effect by surrounding the balance arm with a sheath. Therefore, the
magnitude of drift force shown in Figure 16 could not be caused by convection. Furthermore,
in the upright orientation convective effects would cause a negative drift force as rising air
lifts the heater end of the arm.
4.2.3 Pivot Distortion
Thermal analysis in section 3.5 often points to the pivot as a source of drift force.
There was good reason to suspect this upon first look. The pivot is composed from two rigid
cylinders that will settle to different temperatures due to heating from the engine. The two
cylinders will therefore also settle to different sizes, and the thin flexures holding them
together will easily bend to accommodate. It appears to be an ideal setup for distortion.
Upon further analysis, it becomes apparent that the pivots are actually very stable,
even when subject to a temperature drop. Figure 17 shows that the warmer cylinder will grow
due to thermal expansion.
The flexures experience an average temperature rise of AT/2
causing them to grow just enough to fill the gap between the warm cylinder and the cold
cylinder. There is no deflection and no torques. Both cylinders remain concentric even as
one of them changes size.
To verify this theory the pivot was tested in two different twist orientations. First the
balance arm was positioned to zero rotation and heated to twenty-five, thirty-five, and fortyfive degrees Celsius. Then the balance arm was rotated 0.25 degrees and the heating cycle
repeated. The drift force was the exact same for both cases. This confirms the theory that the
pivot itself makes not significant contribution to the drift force.
46
TcOLD + AT
TCOLD
TCOLD
TCOLD
Pivot length L = Rc + Rc
where Rc = cylinder
radius when
cold
Rh
=
L'
=
Rc (1 + aAT)
L±( + %aAT)
= Rc + Rh
Figure 17: Even with a temperature drop, this pivot experiences no stresses and no center shift.
4.2.4 Stress Applied to Pivot
To better quantify the drift force, the thrust stand was tested at a uniform elevated
temperature. This highlighted the presence of two different thermal effects that combine to
cause the drift force; internal temperature gradients, and overall temperature rise of the thrust
stand. The thrust stand was secured inside an insulating box and then heat was applied.
While in this heating mode, the thrust stand still experienced temperature gradients as all
power was added to a small area at the end of the arm. After sufficient heating however, the
heater is powered down, and the thrust stand settles to a uniform, elevated temperature. From
this point, the whole assembly will slowly cool as the insulating box leaks heat. Figure 18
illustrates the thrust stand response. The plot begins just as the heater is powered down. The
thrust stand equilibrates to a uniform temperature about fifteen degrees above room
temperature and then cools over the next twenty-four hours.
47
18.0
- - -- -
16.0
14.012.0-
Overall Temperature Rise
TBASE- To
10.0 8.0
6.0 4.0
Temperature Difference-
2.0 -
2.0
TARM - TBASE
-
2.00-
Measured Drift Force
CalCUlated Drf
Cn 1 + Cmo 2
1.501.00-
-
0.50
I
Componcent i due to
I lU:lic
ZV
0 00 -S-0.50-
-1.00Comnponent 2 dueUto
1.50 -1.50
vera
du
Te mperatur
R ise
-2.00
-2.50
0.0
400.0
800.0
1200.0
1600.0
Time (min)
Figure 18: Drift Force can be determined from two temperature components. The shaded zone indicates
time when the heater was activated.
The results of this test highlight several interesting effects. The thrust stand clearly
exhibits a drift force even when it is at a uniform temperature. This indicates that the drift
force cannot be explained solely by internal temperature gradients. Furthermore, this drift
force is in the negative direction, opposite to that indicated in Figure 16. During that test, the
thrust stand experienced large internal temperature gradients, but very little overall
48
temperature rise. A logical conclusion is that a temperature increase of the whole thrust stand
causes negative drift and temperature drops within the thrust stand cause positive drift. These
two opposite effects combine to produce the measured drift force.
Notice a dip in the drift force in Figure 18. It is the result of a ten minute period of
heat addition.
Heat addition causes temperature gradients, and therefore, a positive
component of drift force.
This positive component cancels out some of the negative
component from uniform heating to bring the overall drift force closer to zero. With the right
combination of overall heating and temperature gradients, the two effects would completely
cancel out.
A possible explanation for this combination of positive an negative drift is thermal
expansion of dissimilar materials. The aluminum balance arm and aluminum base structure
are rigidly connected by steel pivots. If the whole assembly is heated, the aluminum parts
expand more than the pivots, loading them in axial tension (Figure 19). Conversely when the
balance arm is heated more than the base, it alone expands to load the pivots in axial
compression (Figure 20).
Figure 19: Side view of the thrust stand when it
is uniformly heated. The gap expands more than
the pivot, placing the pivot in tension.
Figure 20: If the arm is warmer than the
base it expands more. This closes off the gap
and places the pivot in compression.
49
An overall temperature rise above the starting temperature To produces a tensial load
load on the pivots described by:
FT
=K
* 1G
A1 ~
SS
BASE ~T~
(17)
where K = pivot axial rate - 9000 N/mm
lG = gap width as shown in Figure 19 - 18 mm
An additional temperature rise in just the balance arm produces a compressive load
described by:
1
2
Fc =*K*l
where
*
aA
* (TARM -TBASE)
(18)
lA = width of the arm and pivot mounts - 50 mm
For the higher heat loads, these forces can exceed one hundred Newtons. The two
equations are combined to yield the estimated drift force illustrated in Figure 18.
NASA's Micropound Extended Range Thrust Stand (MERTS) experienced similar
effects. Like this design, MERTS employs a balance arm mounted between two coaxial
pivots. To eliminate axial loading on the pivots, the MEERTS team mounted one of the pivots
on a diaphragm. This diaphragm allowed the pivot to shift in the axial direction only, thereby
relieving stress.
The effect of axial loading can easily be tested by removing one of the pivots. The
only reason for two pivots is survival of launch loads, so operation on the ground with one
pivot is acceptable. Note that a one-pivot configuration limits the thrust stand to operation on
its side so that the balance arm hangs symmetrically from the single pivot. Figure 21 shows
the thrust stand response in both the one-pivot and two-pivot configurations.
The thrust stand definitely exhibits new drift characteristics when configured with a
single pivot. While the drift force now takes twice as much time to fully develop, temperature
measurements retain the same response as in the two-pivot configuration. The variation of
drift without an accompanying variation in temperature indicates that the one-pivot drift may
be caused by another source. Nevertheless, the drift in both configurations settles to the same
value. It is unlikely that two different sources cause drift of the exact same magnitude.
50
70
60-
5040 30 20-
OX Dr i Forc
1X
o Drift Force
w/ I Pivot (mN)
(NN
fW
w1vPivots
10-
-10 -1
0.0
50.0
100.0
150.0
200.0
250.0
300.0
350.0
Time (min)
Figure 21: The thrust stand still drifts in the one-pivot configuration, but possibly
due to a different source.
4.2.5 Twist in the Pivot Mount
The pivot mount presents a possible source for the drift force shown in Figure 21. The
mount consists of a 'C' shaped aluminum clamp. A steel bolt clamps the open end to securely
hold the pivot. A drawback to this design is the difference in materials on each side of the
pivot. As this part is heated, the aluminum on the left side will expand more than the steel
bolt on the right side. In effect, the right side will clamp down relative to the rest of the part.
It is difficult to model how this change in geometry will rotate the balance arm. The
balance arm is mounted asymmetrically to the pivot mount as shown in Figure 22. As this
mount deforms, the arm is pulled along and rotated. The magnitude of rotation depends on
local friction and elastic deformation between the two parts. As a first order approximation,
assume that the bolt spans a six millimeter wide gap. For a change in temperature AT, the
differential expansion will cause a rotation:
51
2r
AT*lG
where
G =
r
(aA,
(19)
-as
6 mm gap
distance from bolt to pivot center - 16 mm
The controller will apply a force, which registers as a drift force, to null this rotation:
F =6*r
where r =
(20)
the balance arm length
For a temperature rise of twenty degrees Celsius these calculations yield a drift force
of 0.7 mN. This is about one half of the drift force shown in Figure 21 for a comparable
temperature rise.
MOUNTING HOLES
CONNECT MOUNT
TO BALANCE ARM
ALUMINUM
STEEL BOLT
0O
Figure 22: The mount changes geometry when its temperature is increased.
4.3 Estimating Drift Force
While the ultimate goal is to totally eliminate the drift force, the thrust stand can still
dependably measure engine thrust with the thermal drift. Temperature sensors provide a good
thermal picture of the thrust stand. From this knowledge the drift force can accurately be
calculated and then removed from thrust measurement data.
52
The temperature sensors provide a good thermal picture, but not a perfect one. During
transition periods the temperature sensors do not capture the whole picture, and therefore the
model cannot accurately predict the drift force. Drift prediction is only valid during quasi
steady state operation. Figure 23 illustrates the areas where drift force can be accurately
correlated to the measured temperatures. This limitation should not affect thrust measurement
as the engine is a steady state device. Large temperature changes are not expected, so the
thrust stand should operate close to steady state during the majority of measurements.
Drift force is calculated in equation 21 as a linear combination of three temperature
readings; the heater end of the arm, the middle of the arm, and the base structure. The
measured drift force and that calculated from equation 21 are plotted together in Figure 23.
Both plots show thrust stand response when it is operating in vacuum and oriented on its side.
This is the configuration that will be used for thrust measurements.
Drift Force = - 0.17 (TEND
-
TARM)
+ 0.23 (TAJM
-
TBASE)
0.06 (TBASE
-
TREF)
-
(21)
Equation 21 indicates that the drift force is caused by a combination of effects.
Twisting of the pivot mount, as described in section 4.2.5, is related to the TARM - TBASE
temperature drop. Both equation 21 and the calculations in section 4.2.5 predict a positive
drift force due to this temperature difference. Nevertheless, the scaling factor in equation 21
is larger than expected by a factor of ten.
The first term in equation 21, TEND - TARM shows the effect of a temperature gradient
along the balance arm. The exact effect is not known, however a shift of the center of mass is
considered a likely candidate. To better understand the effects from this temperature gradient,
future tests should include additional thermistors mounted along the length of the arm.
The final term in equation 21, TBASE - TREF, addresses the overall temperature rise of
the thrust stand above a starting reference temperature.
This term makes only a small
contribution as the base structure temperature does not rise by more than a few degrees, and it
is scaled by a small factor.
53
70.0
0110
011260.01
50.0-
End Temp,--
-
40.0
E
Arm Temp
Arm Temp
Base Temp
Base Temp
20.0-
10.0 1
0.0
100.0
300.0
200.0
400.0
0.0
500.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
70.0
80.0
6.00
6.00
Measure Force
5.00
5.00
4.00
4.00
2 3.00
E
3.00
2.00
o 2.00
1.00
1.00
0.00
0.00
-1.00
-1.00
0.0
100.0
200.0
300.0
Time (min)
400.0
500.0
0.0
10.0
20.0
30.0
40.0
50.0
60.0
Time (min)
Figure 23: Shown are two different vacuum tests of the thrust stand. Both are correlated by
equation 21. Shaded areas indicated transient conditions where the equation does not apply.
54
5 RECOMMENDATIONS AND CONCLUSION
Testing up to this point has demonstrated that the thrust stand can measure force
between 0 mN and 30 mN with a resolution of 0.1 mN. Maximum calculated error for these
measurements is 0.2 mN. The thrust stand has been tested in its upright position, where
calibration occurs, and on its side, where the majority of thrust measurement will occur.
Several potential sources of thermal drift have been identified and further testing is
recommended to confirm the source. In particular, axial loading of the pivot and twisting in
the pivot mount are suspected to be the primary sources of thermal drift. Both of these effects
are caused by thermal expansion of dissimilar materials.
The drift force was also quantified and correlated to thrust stand temperature as
outlined in section 4.3. This relation will allow accurate operation of the thrust stand until the
source of thermal drift can be confirmed and eliminated.
Besides elimination of the thermal drift, several design modification are required
before the thrust stand is operational. The engine must be mounted to the balance arm by way
of a heat stop. To maintain balance, a counterweight must also be mounted exactly opposite
to the engine.
5.1
Future Testing
The most immediate work on the thrust stand should be solution of the thermal drift
force. Final analysis has revealed the pivot mount as a likely source of the error. With
continued testing, the drift force can be eliminated, thereby producing a more robust thrust
stand.
The pivot mount appears to cause the drift force, however due to its complicated shape
the exact mode is difficult to model. Fortunately the mount can be modified to eliminate its
twisting tendency.
The current pivot mount is a 'C' shaped piece of aluminum that is
clamped around the pivot by a stainless steel screw. The asymmetry of material from side to
side is the cause of twisting. The asymmetry can be removed by cutting through the 'C' and
connecting the two pieces with a screw on each side. The modification is illustrated in Figure
24. Notice also that two extra mounting holes are added to produce complete symmetry.
55
Figure 24: A simple pivot modification will provide the necessary symmetry.
Recall that the drift force is due to either pivot mount twist in the one-pivot
configuration or axial pivot loading in the two-pivot configuration. Therefore, an alternative
solution reverts back to two pivots so that opposite mount twisting from both sides eliminates
the effect. One of the mounts must be
modified to allow pivot movement in
the axial direction, while restraining all
0
other rotation or movement.
In Figure 25, the mount is
clamped just enough to restrict all
0o
translation except that along the pivot's
axis. Then a hole is drilled along the
Figure 25: A steel pin keeps the pivot from
rotating, but it can still slide along its axis.
mount/pivot interface.
A pin is fit into
this hole to prevent rotation between the
pivot and mount. This setup restricts all
pivot movement except translation along the pivot axis (out of the page in Figure 25). When
heated, the balance arm is now free to expand in the axial direction without placing additional
loads on the pivots.
Any redesign of the pivot mount should include both of these modifications. The
thrust stand is capable of operation in either the one-pivot or two-pivot configurations.
Before any of these modifications can be tested, the thrust stand electronics need to be
replaced. The controller and amplifier used for the thrust stand belong to Draper Laboratry,
56
and therefore must be returned.
Replacing these components with another commercial
controller will return the thrust stand to operation in the shortest time. Appendix E describes
replacement options.
5.2
Completing the Ground Based Thrust Stand
Once thermal drift is contained to an acceptable level, the thrust stand design can be
completed. Three major components must be added to produce the ground based thrust stand;
the engine, the heat stop, and the counterweight. The design evolution, including possible
upgrade to a flight model, is shown in Figure 26.
Prototype
I
Thermal components
Ground
Model
Flight
Model
I-_-
I
I
Flight base structure
Launch clamping
Figure 26: Completion of thermal tests allows final design
of thermal components such as the heat stop.
The engine must be mounted to the balance arm by way of a heat stop. Section 3.5.2
outlines an elaborate heat stop design that will minimize ATp, the temperature drop across the
pivot. Final results from thermal testing will indicate if such a design is necessary. If the
57
thermal drift can be eliminated, then a simple steel mount will suffice.
In addition to
mounting, the engine must also be supplied with wiring and propellant lines. To limit their
effect on force measurement, these lines should cross the base to balance arm interface near
the pivots.
A counterweight of equal mass to the engine must be mounted on the far end of the
arm to maintain mass balance. Figure 27 shows that the engine and counterweight must be
mounted above and below the arm respectively to completely center the mass.
The
counterweight itself is just a properly sized piece of steel. Its mount however, will require
some design. The mount must be designed to hold the counterweight's center of mass an
equal distance from the arm as the engine's center of mass. This distance could exceed sixty
millimeters, especially when the engine is mounted on top of a heat stop. In addition, the
mount must be capable of moving the counterweight over a range of several millimeters.
With this setup, the counterweight can be finely positioned to best balance the arm.
5.3 Spaceflight Considerations
This thrust stand was originally intended to operate from low Earth orbit. While the
present configuration is not capable of spaceflight, the basic design does have the potential to
be modified if necessary. This includes adequate strength to survive launch loading as well as
a thermal flow that can operate in vacuum and that is easily shielded from the harsh radiation
environment in space.
The current configuration uses the same core as would be required for space flight.
This includes the pivots, pivot mounts, and balance arm. It is the base structure and cooling
sheaths that have been simplified for the current configuration to save cost. In a spaceflight
design, these parts are replaced by a one-piece aluminum box. The box is hollowed out so
that the balance arm and counterweight can fit inside. This one-piece base structure provide
better mechanical strength, more precise alignment for the components, and a better
conduction path to keep the structure cool. The spaceflight assembly is illustrated in Figure
27.
When completely assembled, the box surrounds the entire balance arm, with one
exception; the engine. This isolation is ideal for the harsh radiation environment in space.
The balance arm also requires a modification for launch loading. Although the pivots
are strong enough to restrain linear balance arm motion during launch, they do allow it to
58
-
ON- - --
.-
-
rotate. In this condition, the balance arm would repeatedly bounce against the base structure
during cyclic loading. Therefore, some sort of clamping mechanism is required to prevent
balance arm rotation during launch. Several clamping schemes are detailed in Appendix F.
Launch
Clamping
Figure 27: The spaceflight configuration surrounds the balance arm with an aluminum box.
59
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
60
APPENDIX A
TRADE STUDY: THRUST STAND CONCEPTS
intage
Meu minHuu d tiniuso
LOU LUDIWUVVIL1d
t1UU
W3M
C2UTUDL
LdIU LUOLVU
Lti
Micro-Newton Thrust Stand to Strain Gauge Based Thrust
]Measurement System
FEEP
Thrust Stand for High Power
Electric Propulsion Devices
Interferometric Proximeter
System (IPS)
Cork Institute in Ireland
Compact Thrust Stand for
Pulsed Plasma Thrusters
Meeis requiremeni
Meets requirement
Meets reequirement
Meets requirement
Meets requirement
Unknown
active damping
A basic pendulum
Unknown
Complex stability issues
Minimal
Dynamic measurements
Added complexity for dynamic
behavior
Minimal
Very sensitive to vibrations.
Sensitive to vibrations
Sensitive to vibrations
Eliminates vibrations
Lacks rigidity along several
axes
Sustains all loads
Likely failure
Function in
Microgravity
Insensitive to gravity
Uses gravity to increase
sensitivity, but works in
Heavily dependent on gravity
Requires power to the
electromagnet or a
mechanical stowing device
Functions in microgravity
Ground Testing
Insensitive to gravity
Change in sensitivity
Fuel lines would be much
stiffer than the wire flexures
Easily integrated into the
flexures
Flexible fuel lines would add
minimum stiffness
Ruins the non-mechanical
interface
Heat Sinking
Active cooling required
Multiple strain gauges cancel
out thermal effects
Conduction with a possible
effect on elasticity
Active cooling required
Conclusion
ELIMINATED. Cannot
sustain launch loads, or
operate with vibrations.
ELIMINATED. Complex
ELIMINATED because of poor
design adds nothing to static
vibration response.
measurements and detracts
from required flight
characteristics
Hesolution: 0.1 mN
Range: 5-50mN
Time Response: 2 s
Design Complexity
Power
Vib. operating
environment
Sustain Launch Loads
Unknown
Simple, a mass suspended
by wires
Minimal
,With
I
meets requirement
I
u1KnsoW1
Moderate - High
microgravity
Fuel Line Interface
Significant change inbehavior Expected change in behavior
ELIMINATED. The levitation
provides good vibration
response, but causes
problems with launch loads
and fuel line interface.
61
I
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
62
APPENDIX B
MACHINE DRAWINGS
63
4
3
REV
APVD/DATE
JM
0.591 THRU
D
CHR
OWN
DESCRIPTION
0.6+ RELEASED PER ECR
NOTES:
6X 0.136 THRU
L-J 0.219 X T.276
1
I FL
-
D
f
- -- --- ---
2X 1.928
1.574
o
0
0
0
0
0
0
0
1.574
2X 1.928
C
C
2X .669
2X .669
C/)
B
n-)
C/)
FIND
.No.
OTY UC CAGE PART OR
CODE
IDENT
NO.
NOMENCLATURE/DESCRIPTION
NOTES
-
UC : (USAGECODE) FOR PARTSWITH SAME FIND NO. S : SELECT,P : PREFERED,A : ALTERNATE
PARTS LIST
PART NO. ETV-TST-144
B
SHEET
REOISIOMSTATUS
INTERPRETDRAWING
IN ACCORDANCEWITH
MIL-T-3 000T
THECHARLES STARKDRAPERLABORATORY,INC
02139-35A3
CAMBRIDGE,MASSACHUSETTS
DO NOT SCALETHIS DRAWING
A
NOTES:
I. BREAK SHARP EDGES AND REMOVE BURRS
2. SURFACE FINISH 1.6 uM
NEXT ASSY
4
4
3
3
USED ON
APPLICATION
UNLESSOTHERWISE
SPECIFIED
CAPACITORS
NH) IN MP
RESISTORS
VALUESARE INOHMS
DIHENSIONS
ARE IN INCHES
TOLERANCE
ON
ANGLES
DECIMAL$
.10 0.01
.xx * 0.00s
* o.*
CONTRACTNO.
MATERIAL
APVD
6061-T6 AL ALLOY
OWN J MttCZAK
BASE
THERMAL TEST
mil0
CHK
AVD
AV0
mm
A
ETE[V
nese
SIZE
CAGE CODE
REV
DRAWINGNo.
C 519931TEST - BASE -2
SCAL
F
Il/l
ISHEFTI OF I
. 6+
4
+
3
REV
D
NOTES: 1.
2.
3.
4.
- - - - -
- - - -
-
JM
.D
1.378
2X
4X TAP 4-40 THRU\
FRONT SIDE ONLY2X.9
-------- -
OWN CHK APVD/DATE
DESCRIPTION
0.3+ RELEASED PER ECR
USE STOCK I 3/4 IN SQUARE TUBING -- 1/8 IN WALL THICKNESS
SURFACES WITHOUT DIMENSIONS DO NOT REQUIRE MACHINING
BREAK SHARP EDGES AND REMOVE BURRS
SURFACE FINISH 1.6 uM
- - -
2X . 512
2X .512
7.283
C
C
I 772
S-
-
L
8
866
<C
LaJi
B
FIND
NO.
OTY UC CAGE
ICODE
PART OR IDENT NO.
NOMENCLATURE/DESCRIPTION
NOTES
UC : (USAGE
CODEIFOR PARTSWITHSAMEFINDNO. S : SELECT,P : PREFERED,
A : ALTERNATE
PARTS LIST
REV I
I
I
I
I
I
I
I
I
I
1
1
U
I
SHEET
PART NO. ETV-TST-143
REVISIONSTATUS
INTERPRET
DRAWING
INVCCORDANCE
WITH
MIL-T-31000I
THECHARLESSTARK SETLR
L 2
3ORATOR35
INC.
MASSACHUSETTS
02139-3563
CAMBRIDGE.
1!AM&oIfl
DO NOT SCALETHISDRAWING
SCALE
os~s
0.500
A
isP-sFttit0.
H,150
CAPACTOSARE
I N u-F
RESISTORS
VAL"S AREINSANS
DIMNSIONS
AREINI
INCHES
TOLERANCE
ON
ANGLES
-1 t 0.01
.EXE* 0.000 ;h 0.05
CONTRACT
NO.
MATERIAL
APVD
DECINALS
NEXT ASSY
USED ON
APPLICATION
4
4~f
3
6061-T6 AL ALLOY
OWNJ
SHEATH - RIGHT SIDE
[CIM
11/15l02
THERMAL TEST
C-
APVD
A
ETEEV
APVD
SIlEj
CAGECODE
REV
DRAWINGNO.
C 51993 TEST -SHEATH _R p . 3+
HE IO
0 .|
Iof- I
I3AFSAE I 0050
| utS
SCALE:
T
3
4
REV
10.7+
NOTES:
DESCRIPTION
CHK
OWN
RELEASED PER ECR
APVD/DATE
JM
D
D
4X TAP 4-40
{
FRONT SIDE
2X .512
57
2X .512
C
C
2X R.126
.Li--L
-_--
..
JJ.J.L-LL ---.----
NOTES:
1. USE STOCK I 3/4 IN SQAURE TUBING -- 1/8 IN WALL THICKNESS
2. SURFACES WITHOUT DIMENSIONS DO NOT REQUIRE MACHINING
3. BREAK SHARP EDGES & REMOVE BURRS
4. SURFACE FINISH 1.6 uM
-
(.875)
7
-r
c
.866
B
h-----
---
-Trr-
--
---
i
rr
OTY U
N
PART OR IDENT NO.
NOTES
NOMENCLATURE/DESCRIPTION
UC : (USAGECODE)FOR PARTS WITH SAMEFIND NO. S : SELECT,P : PREFERED,A
= ALTERNATE
PARTS LIST
U
REV
PART NO. ETV-TST-142
SHEET
REVISIONSTATUS
INTERPRE
I
T DRAWING
DRAWING
IN ACCORDANCEWITH
31000
D0 NOT SCALE THISDRAWING
WISE
SPICIFIlb
UNL.ESS
OTHER
ARE N u
ADSARE INGING
RESISTR VAARE I N INC
HES
SCALE
A
1/2
T0LERANCE
ON
DE
x t 0.01
.XEx
0.005
44
3
3
USED ON
APPLICATION
CONTRACTNO.
OWNJAIRlcAK
10/1102
C"P
ANGLES
*
0.5*
MATERIAL
NEXT ASSY
THE CHARLESSTARRDRAPERLA3ORATOR. INC5
CAHBRIDGE.MASSACHUSETTS
02139-3563
6061 -T6 AL ALLOY
APVi VIRKlAK10/14/02
SHEATH - LEFT SIDE
THERMAL TEST
APVD
Aen
SIE
A
ETEEV
APVD
CAGE
CODE RAWING
NO.
REV
C 51993 TEST-SHEA TL.7+
TCALT
I/I
I
ISHOOTI
of
I Of
ISHEET
I---
4
NOTES:
D
3
\1
DESCRIPTION
R AREV
0.5+IRELEASED.PER ECIRI
I. TOLERANCES ±0.005 IN
UNLESS OTHERWISE SPECIFIED
2. SURFACE FINISH 1.6 uM
3. BREAK SHARP EDGES
& REMOVE BURRS
OWN
CHK
APVD0ATE
2X 0.116 THRU4-40 UNC CLEAR
#32 DRILL
D
2X 0.0960 THRU
2-56 UNC CLEAR
#41 DRILL
C
C
2X 450 X .079 -
.519±. 002
0
B
(~)
FIND OTY Uc CAGE
CODE
NO.
PART OR IDENT NO.
NOMENCLATURE/DESCRIPTION
UC : (USAGECODE) FOR PARTSWITH SAME FIND NO. S : SELECT,P
(/)
w
PREFERED.A
NOTES
H-
ALTERNATE
PARTS LIST
REV
PART NO. ETV-TST-140
SHEET
REVISIONSTATUS
INTERPRETDRAWING
IN ACCORDANCEWITH
MIL-T-31000
- THECAHBRIDGE,MASSACHUSETTS
0213D363
DO NOT SCALE THIS DRAWING
SPECIFIED
UNLESSOTHERWISE
CAPACITORS
ARE IN uF
AREIN HOS
VALU1ES
RESISTORS
NCHES
RENSIN ARE I
ON
TOLERANCE
DECIMALS
ANGLES
A
.XXi RU0S
*
USED ON
APPLICATION
4
4
3
DWNJWirroak
6061-T6 Al Alloy
Voice Coi l Mount
Thermal Test
0)1/1/02
CHK
APV0J wirlaak
0.
MATERIAL
NEXT ASSY
CONTRACTNO.
09/l
A
ETEEV
/02
APyD
I
APVO
APYD
WmyD
SIZE
CAGE CODE
DRAWING NO.
REV
C 51993 TEST _VC-MOUNT2 5+
SCALE: 2 .3
000
|
ISHEET I OF I
4
NOTES:
3
1. CBORE TO FIT SCHAEVITZ 050 DC-EC SENSOR
2. BREAK SHARP EDGES AND REMOVE BURRS
3. SURFACE FINISH 1.6 uM
[
. 102
.116 THRU
0.591 THRU
.512
LJ 0.752+001 X T I .492
SEE NOTE (I)
REV
SHEET
REVISIONSTATUS
THECHARLESSTAR DRAPERLABORATOR INC
, MASSACHUSETTS02I39-35A3
CAINAR100E
LVDT BODY MOUNT
THERMAL TEST
ETEEV
SIZE
CAGE CODE
REV
DRAWINGNO.
C 51993 TESTLVDT-BOD 'O 1
SCALE: I/I
4
3
2
I
SHEETI Of
I
3
4
6
REV
NOTES:
D
I. TOLERANCES t0.005 IN UNLESS OTHERWISE SPECIFIED
2. SURFACE FINISH 1.6 AM
3. BREAK SHARP EDGES
& REMOVE BURRS
TAP
TAP
LJ
-LJ
DWN CHK
DESCRIPTION
APVD/DATE
***.stRELEASED PER ECR
D
DRILL THRU
4-40 X T.906
0.116 X T .512
0.193 X T .354
R.079 THRU
C
2X 0.219
THRU
039
I
.039
450
2X 45* X .039
SECTION
SECTION
A-A
B-B
B
B
3X TAP DRILL X T.63(
TAP 4-40 X T.31!
FINDO
NO.
TY UC CAGE PART OR IDENT NO.
CODEI
UC
NOMENCLATURE/DESCRIPTION
(USAGECODE) FOR PARTSWITH SAME FINDNO. S : SELECT.P
PARTS LIST
I
PART NO. ETV-TST-141
NOTES
PREFERED,A
ALTERNATE
REV
SHEET
REVISIONSTATUS
INTERPRE
T DRAWING
IN ACCORDANCEWITH
-31000
.157
THE CHARLESSTARK DRAPENLABORATORY.INC.
02139-563
LG~in~fLIt~i~~~9CAHBRIDGE,MASSACHUSETTS
D0 NOT SCALE THIS DRAWING
UNLESSOTHER
SPECrIED
AREIN uF
UES AREINOHMS
RESISTORS
VAL
ARE IN INCHED
WISE
CONTRACT
NOJ.
MOUNT - BASE SIDE
THERMAL TEST
ETEEV
,,,,,,
OWN
CHK ,,,
A
,,,.
ANGLES
Detr
APvo
t 0.S5'
NEXT ASSY
USED ON
MATERIAL
606 1-IT6
APvD
Al Al0loy
APPLICATION
-4
3
NY nrunN
2
EV
.
N[
C9 E3 DRAWING
CAGE
S I 5l9931TESTBASE-MOt
V.
C
APvo
Bl
n
2. 000
SCALE:
1
I
ISHEET
I OF I
1
4
3
2
REV
NOTES:
D
0.10
t
DESCRIPTION
DRN
CRK
APVR/DATE
RELEASED PER ECR
2X 450 X .008
59 I±. 00 2
D
NOTES:
I. TOLERANCES ±0.005 IN UNLESS OTHERWISE SPECIFIED
2. SURFACE FINISH 1.6 uM
3. BREAK SHARP EDGES & REMOVE BURRS
TAP DRILL THRU
TAP 4-40 X T.906
.116 X T .512
|-J
L-J 0.193 X T.354
.276
C
157
C
2X0 .136 THRU
LJ 0.219 X T.315
-- 709
-. 591
R.079 THRU-..
TT
.7
Hc
'
B
SECTION
SECTION
A-A
FIND OTY UC CAGE PART OR IDENT NO.
CODEI
NO.L
B-B
QL
NOMENCLATURE/DESCRIPTION
UC : (USAGECORE)FOR PARTSWITH SAMEFIND NO. S : SELECT,P
NOTES
PREFERED,A
ALTERNATE
PARTS LIST
I
PART NO. ETV-TST-I1
REV
SHEETI
I
I
I
REVISIONSTATUS
INTERPRETDRAWING
IN ACCORDANCE
- MIL-TIS1D00
WITH
DO NOT SCALE THISDRAWING
UNLESSOTHERWISE
SPECIFIED
AREIN oF
CAPACITORS
RESISTORS
VALUESAR:EINOWNS
RIMENSIONS
ARE IN INCHES
TOLERANCE
ON
DECIMALS
ANGLES
A
.BXX&
S.0DI
t
S,5"
MATERIAL
NEXT ASSY
4
3
3
USED ON
APPLICATION
6061-T6 AL ALLOY
THE CHARLESSTARKDRAPERLABORATOR
. INC.
CAMBRIDGE,.
MASSACHUSETTS
02139-3563
m me
LONTRACTNO.
MOUNT - ARM SIDE
THERMAL TEST
CAR
APVOJ MINCRR
09/12102I
APyO
I SIZE
APVD
CAGECODE
DRAWINGNO.
REV
C 5993 TEST-ARMMOUN .|0
APV0
BY DIRECIl
A
ETEEV
DAir_
2.000
SCALE:
I
ISHEET
I OF I
4A
I
-~
3
2
0
1
1
OWN CHK
DESCRIPTION
REV
NOTES:
APVD/DATE
JM
0.8+ RELEASED PER ECR
NOTES:
I.SURFACE FINISH 1.6 uM
2. BREAK SHARP EDGES & REMOVE BURRS
3. USE STOCK I 1/4 IN SQUARE TUBING -- I/8 WALL THICKNESS
4. SURFACES WITHOUT DIMENSIONS DO NOT REQUIRE MACHINING
D
D
.610
C
2X . 394
.610
(.125)I .2501
c
1.250)
(.1251
2X .394
2X 45
X .020
SECTION C-C
SCALE 2.000
-e H-.591
THRU
FRONT SIDE ONLY
O.315
-'---
------------
-4-
B
TAP 2-56 THRU
L_ 0.188 X T0.125
7.874
FIND
NO.
OTY
UC AGE PART OR IDENT NO.
IC CODEI
NOMENCLATURE/DESCRIPTION
UC : (USAGECODE)FOR PARTSWITH SAME FIND NO. S : SELECT,P
NOTES
PREFERED,A
= ALTERNATE
PARTS LIST
F
IREV
B
PART NO. ETV-TST-l112
REVISIONSTATUS
610
RRN
INEPE
I
IN ACCORDANCE
WITH
MIL-T-3ITVO
THE CHARLESSTARR ORAFERLABORATORY.INC.
02139-3503
CAMARIDGE AASSACHOSETTS
w
00 NOT SCALETHIS DRAWING
SPECIFIED
UNLESSO"ERWISE
ARE IN uPF
CAPACITORS
ARE INOHMS
RESITORSVALSES
ICHES
ARE imIN
DIMENSIONS
TOLERANCE
ON
DECIMALS
A
.xxx t
DETAI L D
SCALE 2.000
USED ON_
APPLICATION
A
4
0.001
MA6TERI
AL
NEXTASSY
3
CONTiRACT
NO.
OWN J MIRCAK
3ALANCE ARM
TI
HERMAL TEST
10113102
CAR
ANGLES
t
6061-T6 AL ALLOY
APvD
SIZE
CAGECODE
APvo
C
5 I993
ni-f rTina
I
nm"
A
ETEEV
IR1i3102
APASUMIRCOAN
S.S'
0.500
SCALE-
I
|
DRAWINGNO.
REV
TE STARM
.8+
|SHEET
I OF I
3
4
67
I
2
JM
0.1+ RELEASED PER ECR
1. BREAK SHARP EDGES AND REMOVE BURRS
2. SURFACE FINISH 1.6 uM
APVD/DATE
OWN CNK
DESCRIPTION
REV
NOTES:
D
D
2X0.089
THRU
2X .197
.236
-236
C
C
787
TAP7/16-20
THRU
.787
.433
111
18
CD
B
FIND OTY UC CODEPART OR IDENT NO.
NOMENCLATURE/DESCRIPTION
NOTES
UC : (USAGECODE)FOR PARTSWITH SAMEFIND NO. S : SELECT,P : PREFERED,A
PARTS LIST
I
REV
PART NO. ETV-TST-090
___
______
I
I
I
00 NOT SCALETHISDRAWING
OLES ONWISE SPECIFIED
AREIN uF
CAPACITORS
OR INOHMD
VALUES
RESISTORS
ARE'1IINCHRES
DIMENSIONS
TOLERlANCE
ON
ANGLES
DECINALS
'.0%
±
'
DRLt DD 0.5AGLS
OD
MATERIAL
APPLICATION
4.
4
USED ON
3
6061- T6 AL ALLOY
I
I
I
I
I
IWI
I
-
R
REVISIONSTATUS
--
THE CARE
CONTRACTNO.
J
APVO UMIAK
IAPVD
O
RV
0
ST A CASER LA
INC356
.
COUNTER WEIGHT MOUNT
THERMAL TEST
1115/02
A
ETE[V
APV0
NEXT ASSY
I
SHE
IT I I I I I I I I I I
__
IN ACCORDANCEWITH
MIL-T-31000
A
ALTERNATE
SIZE
CAGE CODE
NO.
DRAWING
REV
C 51993 COUNTER-WEIGH -MQUNI
E T II oOf II
SHEET
SCALE 2/ 1
, : I IIS
4
3
07
2
2
-7
REV
NOTES:
D
I. TOLERANCES ±0.005 IN
UNLESS OTHERWISE SPECIFIED
2. SURFACE FINISH 1.6 GM
3. BREAK SHARP EDGES
& REMOVE BURRS
0
OWN CRN
DESCRIPTION
APVD/DATE
0.9+ RELEASED PER ECR
.120'000
THRU
0
2X 0.128 THRU
4-40 UNC CLEAR
#30 DRILL
2X . 157
C
C
.433
I.I
-
.866 - -
B
FIND
OTY
NO.
T
UC CAGE
CODE
PART OR IDENT NO.
UC
:
NOMENCLATURE/DESCRIPTION
(USAGECODE)FOR PARTSWITH SAME FIND NO. S : SELECT,P
NOTES
PREFERED,A
ALTERNATE
I
I
H-
PARTS LIST
REV
PART NO. ETV-TST-110
SHEET I
|
I
REVISIONSTATUS
INTERPRETDRAWING
IN ACCORDANCE
WITH
MILT31000IT
D0 NOT SCALETHIS DRAWING
UNLESSOTHERWISE
SPECIFIED
CAPAC
ITORSAND IN mF
RESISTORS
VARES AREINOHMS
DIMENSIONS
AREIN INCNES
TOLERANCE
ON
DECIMA
LS
ANGLES
A
.iX* S 001
NEXT ASSY
USED ON
APPLICATION
4
3
*
CONIRACtNO.
on
J N,,CA,
LVDT MOUNT
THERMAL TEST
,,,,,,,,2
CHK
APVD
J NIIACAK
0st1102
6061- T6 AL ALLOY
iAPV
IAV0
U,
A
ETEEV
0.5'
MATERIAL
Ly
THE CHARLESSTARRDRAPE
R LABORATORY,INC.
02139-3563
CAMRIDGE, MASSACHUSETTS
SIDE
CAGE CODE
I
DRAWINGNO.
REV
C 51993 TEST-LVDT-MOU TSI
DLK= j.'LCL
I
2. ISI00 I
ISHEE I
F
I
2
i
DWG
NO
R0D
.M3
ISH 1
REV
NOTES:
B
0.1
18
DESCRIPTION
M3 X 0.
.000
DWN
CHK
APVD/DATE
0.5+ RELEASED PER ECR
I. TOLERANCES ±0.005 IN UNLESS OTHERWISE SPECIFIED
2. SURFACE FINISH 1.6 uM
3. BREAK SHARP EDGES & REMOVE BURRS
B
3 X 0.5
-002
7 A
SECTION
.256
A-A
1.634
A
2.047
FIND
NO.
CTY UC CAGE
CODE
UC
PART OR IDENT NO.
NOMENCLATURE/DESCRIPTION
(USAGE CODE) FOR PARTS WITH SAME FIND NO. S : SELECT, P : PREFERED,
PARTS LIST
A
NOTES
ALTERNATE
R EV
I
REV
PA RT NO.
A
ETV-TST-000
S-E
A
REVISION STATUS
INTERPRET
DRAWING
INACCORDANCE
WITH
HIL-T-31IOTA
N
DO NOT SCALETHISDRAWING
THECHARES STAR DRAPRTLABOA
2
RY
356
02139-3563
CAMBRIDGE.HASSACHUSETTS
a
M3 ROD
CONTRACT
NO.
lED
UNLESSOTHERWISESPECI
CAPACITORSARE IN Af
RESISTORSVALUESARE HNURNS
DIMEN
SIONS ARE IN INCHES
TOLERANCE
OH
DECIMALS
.XX00 .01
.XX
0.001
NEXT
ASSY
USED
ON
APPLICATION
21
ANGLES
*0.
MATERIAL
6061-T6 AL ALLOY
DWHJ NIRCZAR
CR0
09/11/02
APVD J MIRC2AK
0911102
THERMAL TEST
APVD
SIZE
APVD
RY DIRECTION
CAGECODE
B 5199 3
APVD
I
2.0
DATEiSCALE:
DRAWINGNO.
M3 RO D
REV
IS I O II
E T I OF
SHEET
5
APPENDIX C
COMPONENT SPECIFICATIONS
OMEGA 44007 Precision Thermistors
Operating Range:
-800C (3684000 Q) to 120"C (194.7 Q)
Temperature / Resistance Relation:
-= A + B(ln R)+ C(In R)3
T
A = 0.0012862162
B = 0.0002359470
C = 0.0000000941
T = temperature in Kelvin
R = resistance in Q
Omega 44007 Thermistor
4
- - - - - - - -
10
-
E---
0 -
-
-
-
-
--
--
-
--
-----
F
4
-L
12
80
0 4 0-6
2 0 --I
-----Temp era u r (C)-----
c 3
--
4-~z10
C/)
--- -
-----
-4
-I
II1
102
10
20
40
60
80
100
120
Temperature (C)
75
OMEGA's Precision
Interchangeable Thermistors
Construction - Thermistors are manufactured from
oxides of nickel, manganese, iron, cobalt, magnesium,
titanium and other metals. All are available epoxy
encapsulated and color coded, with two 3" leads.
Model No. 44004
12
12
10
10
0.8
8
.6
L
In 6
.4
4
2
2
W
Model No. 44005 & 44007
12
1.2
-to
10
8
0.
-
-a-:-
-
.6
a:
-4
-
U) 6
-
4
2
--.
095" DIA MAX
.........
S -80-440
TEFLON TUBE
80 120 150
#32 TINNED
TEFLON
COPPER WIRE
INSULATION
3'LONG
-40
Model No. 44006
1.0
10
8
8
0 40 80 120 150
TEMP. *C
Model No. 44008
1.0
11"OIA.MAX.
T_
-80
TEMP.
10 [
F
-
---
8
O.8
-
-
-
2" MIN,
-4
-- -
41-
-
4
4
2 2-.2
Thermistors with 0.20C interchangeability also are
available encased in a 2" long waterproof Teflon* tube;
order by adding 100 to the part number. For example:
44005 is a standard 3000 Q thermistor; 44105 is a Teflon*
encased thermistor with the same temperature/resistance
values. Stiff wire is placed in the tube so that, with slight
finger pressure, it can be bent to any configuration.
For Teflon* encased thermistors, consult the factory.
Stability - Finished thermistors are chemically stable
and not significantly affected by aging or exposure to
strong fields of hard nuclear radiation.
Time Constant -The time required for a thermistor to
indicate 63% of a newly impressed temperature is
called the time constant. For a thermistor suspended
by its leads in a "well stirred" oil bath, it is 1 sec. max.,
or 2.5 sec. max. for Teflon* encased thermistors,
and in still air it is 10 sec. max., or 25 sec. max.
for Teflon* units.
Dissipation Constant - The power in milliwatts required
to raise a thermistor 1 C above the surrounding
temperature is the dissipation constant. For all
thermistors suspended by their leads in a "well stirred"
oil bath, it is 8 mw/ C min., or 1 mw/ C min. in still air.
Operating Temperature -Maximum operating
temperature is 1500C. Long-term stability studies
show that extended operation or continued cycling
above 90*C will cause thermistors with values less
than 2252 ohms at 25*C to exceed tolerances
eventually. Thermistors 44030, 44031, 44032 and
44033 are designed for operation below 75'C. They
will operate safely up to 100 C, but extended use
above 750C may cause a change in resistance. Storage
temperature for thermistors is from -80 to 120'C.
Tolerance Curves- The following curves indicate
conformance to standard resistance-temperature
values as a % of resistance and as a maximum
interchangeability error expressed as temperature.
- --
-
-80 -40
0
40 80 120 150
-80 -40
.3o
Model No. 44030 & 44034
3.0
25
2
----
20
1- 1 1 t
05"15
0
-
-
- -
0-604-2
2
0
-
0800
Model No. 44031
.30
3.0
.25
25
0.A4.20
20
1 .s 1
' .05
'
5
-60-o40-20
TEMP.*C'
30
- ( 3.0
5 l
05
Model No. 44032
I2
I
25
o
-
0 40 80 120 150
TEMP.*C
TEMP."C
0.20
-
2
-60400
0
.30
15 (123.0
5
.05
.5
0 40'60 810
TEMP.*C
----
0 20 40 60 80100
TEMP.*~C
Model No. 44033
-60-40-20 0 20 40 60 80100
TEMP.*C
Temperature ±C
Thermistor Equation
Occasionally, it is advantageous to have a general
mathematical expression for a thermistor.
OMEGA finds the following equation best represents
thermistor behavior:
-3
05
.
= A + B (LOGeR) + C(LOG R)3
Where T = *'Kelvin; R = resistance; A, B, C = fitting
constants.
A, B and C may be found by writing three equations
utilizing three known data sets: Ri, Ti; R2, T2; R3, T3;
and solving for A, B, and 0.
When -40('CK5T1, T2,T3 5150'C andI|T2 -T1I
50*C, | T3 - T2 | 5000 interpolation data generated
by this equation will be accurate to 0.0100 or better.
2
Thermistor Elements
Compatible Instrumentation
DP25-TH Panel Meter
See Section M
CN3000 Series
Controllers
See Section P
Individual Precision Interchangeable
Sensors, Available ±0.2'C & ±0.1'C Accuracy
44000 Series Thermistor Elements
I__
.OWDIA.
MAX
I
TEFLONTUBE
I
11"DIA MAX
NELAON
i
#32 TINNED
COPPER
IRE
I
.
Epoxy encapsulated, precision matched to standardized
resistance temperature curves, providing predicted
accuracy based on resistance values and
temperature
tolerances shown. For Teflon* encased elements, change
the middle digit to a "1", and increase price by $18 for
0.20C interchangeable elements or
$49 for 0.1 C interchangeable elements.
Ordering Example: 44104 sensor, $15 + $18 = $33
±0.2*C
Interchangeability
0-750C
±0.1 C
Interchangeability
0-750C
Model
Number
44004
44005
44007
44006
44008
44033
44030
44034
44031
44032
Resistance
@ 25"C
(Ohms)
2,252
3,000
5,000
10,000
30,000
2,252
3,000
5,000
10,000
30,000
Maximum
Working
Temp ("C)
150
150
150
150
150
75
75
75
75
75
Storage & Working
Temp. for Best
Stability (*C)
-80 to +120
-80 to +120
-80 to +120
-80 to +120
-80 to +120
-80 to +75
-80 to +75
-80 to +75
-80 to +75
-80 to +75
Price
Color
Each
Code
End
Body
$15
Yellow
Black
15
Green
Black
15
Violet
Black
15
Blue
Black
15
Gray
Black
22
Orange Orange
22
Orange Black
22
Orange Yellow
22
Orange Brown
22
Orange Red
Typical Thermometric Drift
(±0.20C Elements)
Operating
100 months
10 months
Temp.
<0.01 0C
<0.01 0C
00C
0
0.020C
<0.01 C
25 C
0.320C
0.200C
100 C
not recommended
1.50C
1500C
Discount Schedule
1-9 ...................................
10-24................. . .........
25-49 ..... ...
N et
10%
................ 20%
50-99 ..........................
30%
100 &over................... 40%
D-4
SmmenI.
T
-0
Minco H4A20W28V Button Heater
78
-INA-
BULLETIN HB-1
-MINIATU1RE' HEAT REUTPTONS
"6
HTA
H8A
SERIES
L*FWENIGH
GenI
70.50diameter
0 180 dr 0.165 thic
4 to 6 grams
machine screw
Les
high temperature
cemet, or cernp
betwbn surface.
-TYLEs
-a
SWeuile
(2)
or
Soda-eaedt
-em
-
pus Specie Heatr
ensoailabrom
give you localized heat in minimum space
1. Provide Localized, Concentrated Heat.
... just .750" diameter and only .180" or .165" thick.
2. Application Versatility . . . ideal heat source for small mechanical, electrical or electronic assemblies and components such as gyros, valves, relays, crystal ovens, instruments,
circuits, thermal time delays, for laboratory and medical use, cryogenics temperature
control, etc.
3. Installation Simplicity . . . lets you put heat where you need it . . . simple to install
on flat surface with #2 machine screw or high temperature cement.
4. "Off-Shelf" Availability . .. 2, 5, 10, 15 and 20 watt units at 28 and 115 volts available from stock for immediate shipment.
5. Correct Wattage Easily Determined . . . a special combination Heater-Sensor is
available, from stock, for prototype work . . . lets you experimentally select the right
2tock, 1. o 28 "Ittv,
2, 5, 10, 15
0wts
Ns
a Snt
s
Us
tOffft-
wattage for your use . . . saves time, prevents errors.
6. Custom Units Available . . . you can specify non-standard voltage, wattage for your
critical or special applications.
Minco's Miniature Heater-Buttons are a
widely accepted means for providing concentrated, localized heat in minimum space,
and give you a reliable method of warming
to operating temperature such mechanical, electrical or electronic devices as
valves, gyros, relays, crystal ovens, instruments, circuit modules, thermal time delay
devices, etc. They are easily mounted by
means of small (#2) machine screw or
high temperature cement, or the Model H7A
units can be clamped between surfaces.
In conjunction with temperature controls, the Heater-Buttons can be used to
maintain devices at precise temperature
levels for critical applications. Minco's
Heater-Buttons are widely used as heat
sources for aero-space, laboratory and com-
-73n0
aLane'/nheapoI
nCmem
mercial applications.
Three standard models, each available
for immediate delivery in 5 power ratings
and in both 28 and 115 volt versions, offer
the user a choice of regular, low silhouette,
and environmentally sealed units. Other
wattages and voltages are available on special order. To help you select the proper
Heater-Button, and for other experimental
or temperature sensing purposes, a special
combination Heater-Sensor Button, the
HS4A100, is available from stock for your
prototype work. You can experimentally select the right value of wattage for your
application. Brief instructions for use are
on the reverse side of this bulletin; complete
instructions are included with each HeaterSensor.
MWnnsoIf 56432 /1WX
gasgH6
gi go:dttiemi
pppngs
o
ar
c
r
1
C
M
.p.r.tue
_
eiede
-
-
-
-
MINIATURE HEATER-BUTTONS
SPECIFICATIONS
WATTAGE
MODEL NO.
115 Volts AC or DC
MODEL NO.
28 Volts AC or DC
ENV. SEALED
ENV.SEALED LOW PROFILE LOW PROFILE
STANDARD
ENY. SEALED
ENV. SEALED LOW PROFILE LOW PROFILE STANDARD
2
5
10
15
H4A2W115
H4A5W115
H4A1OW115
H4A15W115
H6A2W115
H6A5W115
H6A1OW115
H6A15W115
H7A2W115
H7A5WI15
H7A10W115
H7A15W115
H8A2W115
H8A5W115
H8A10W115
H8A15W115
H4A2W28
H4A5W28
H4AlPW28
H4A15W28
H6A2W28
H6A5W28
H6A10W28
H6A15W28
H7A2W28
H7A5W28,
H7A10W28
H7A15W28
HSA2W28
H8A5W28
HBA10W28
H8A15W28
20
H4A20W115
H6A20WI15
H7A20W115
H8A20W115
H4A20W28
H6A20W28
H7A20W28
H8A20W28
HS4A100 HEATER-SENSOR
Element resistance is 100±1 ohms at 0*C. (32*F.) and varies
H54A100 Heater-Sensor has same dimensions as H4A Series.
approximately .7 ohms per degree C. (approximately .39 ohms per degree F.) from 0*C to 200*C. A table of resistance versus
temperature, and instructions for use (Application Aid #5) are included with each unit.
.1- 5 Na.
POWER RATING DETERMINATION
The maximum power at which the Heater-Buttons can be
used is determined by the.temperature of the surface to
which they are attached. To ossist in evaluation of this
factor, the above deraring curve is used. Internal element
temperature of all models is limited to 260*C (500F) and
therefore the sum of the temperature rise of the element,
added to the temperature of the heated surface cannot
exceed this figure. Please ask for Minco Application Aid
#4 for detailed information.
The HS4A100 Heater-Sensor Button is used for prototype
and empirical determination of the power required in an
application. By operating the HS4A100 from an adjustable
power source, the temperature of the element and the power
required for an application can easily be determined by
simple voltage and current measurement.
Please ask for
Minco Application Aid #5 for detailed instructions.
H8A
H7A
MA
WA S-I
6
J
PHYSICAL SPECIFICATIONS
SIZE: 0.75" diameter, .165 or .180 thick maximum not including terminals. See dimensional sketch above.
CASE: Nickel plated brass. Crimped closure on H4A Heaters, H7A Heaters, and HS4A Heater-Sensor. Crimped and
solder-sealed closure on H6A and H8A Heaters.
LEADS: AWG#28, stranded, Teflon insulated, nominally
6" long.
TERMINALS: Glass-to-metal sealed feed-thru on H4A, H6A,
and HS4A Models. Potted leads on H7A. Potted terminals
on H8A Models.
4 &.( .44
MOUNTING: Clearance hole for #2 machine screw. Mounting surface must be flat and burr free for good thermal
contact. A thermal transfer compound (Dow Corning Heat
Sink Compound #340 or equivalent) should be used on
mounting surface. Tighten to screw manufacturer's recommended torque.
IMMERSION: Immersion in non-conductive liquids is permissible. H6A and H8A Models are solder sealed to protect the element under adverse environment. Since. the
terminals are exposed on all models other than the H8A,
precaution should be taken not to immerse terminals in
conductive fluids. H8A Models meet moisture resistance
and immersion per MIL-H-22577A.
WEIGHT: Standard and low profile models 4 grams max.
Environmentally sealed models 6 grams max.
M0INCO
PRODUCTS, INC.
7300 Commerce Lane|IMinneapolis. Minnesota 55432/ TWX: 910-576-2848/|Telephone: (612) 786-3121
6- 10-68
FORM 651214
BEI LA 10-08-OOOA Voice Coil
81
D
I UNITS I TOL
DC RESSITANCE
VOLTAGE
0 Fp
CURRENT0 Fp
OHMS
VOLTS
AMPERES
FORCESENSITIVITY
0
BACK EMFCONSTANT
V
C
lox
V//SC
:01
MIW-HENRY *302
INDUCTANCE
ACTUATOR PARAMETERS
R
V
is
UNITS
K@
L
KI~I
IP~NI~~A.
.
.
5T,
1
A00_0A
114L1-800
9.9
A 00-0674UPDATE TO CURRENT STANDARD
RG 10/17/0
B 021188 UPDATETODUALDIM.TITLEBLOCK MJL 10/29/02
18.3
1.85
M.G.
M.G.
Fp
Fs
9
2.7
KA
4.13
_
ACTUATOR
CONSTANT
0z
ELECTRICAL
TIMECONSTANT
T
NICAL ME CONSTA
CNT T
MEHNIA
POWERPR 0 Fp
STROKE
ON EACHSIDEOF COIL
CLEARANCE
MIL-SEC
U11L1S
TTS
* INCHES
* MM
MIN
THERMAL
RESISTANCE
OF COIL
MAX. ALLOWABLE
COILTEMP.
C ATT
C
WEIGHT
OF COILASSEMBLY
0Wc
,IM C
110
3.51
1.2
D
SYMBOL VALUE
CONTINUOUS
STALLFORCE.
_
WDA I
3
4
5
*lxKD
P
PEAKFORCE
_
I
125
S .1
33.1
0100
2.54
089
PIP
A
15.5
155
T
TEMP
FORCE VECTOR
0247
WEIGHT
OF FIELDASSEMBLY
C
ISYMBOLI
*12.5X
NOMINAL
NOMINAL
3
4
5
66
77
B
8
WINDING
CONSTANTS
W
F
3289
C
10 SECONDS
AT 25'C AMBIENT,
155'CCOILTEMP
25"CAMBIENT
& 155C WINDING
TEMPERATURE
2x #2-56 UNC-28 THRU(
(COILASSEMBLY)
4-
V.100[2.54]
MAX.)
B
B
04-40 THD' .10[2.5] MAX.
#10-24 THD THRy
(COILASSEMBLY)
COILASSEMBLY
WIRE:TEFLONTYPEE INSULATION
028 AWO
12.0(305] MINLONG
2 PL
(RED,BLACK)
A
OBE WR
onesu"
uaa
's
ANQEPROEClOCN
THRD
-a004"A
DOT
101MALE
A POSITIVE
(+) VOLTAGE
APPUEDTOTHERED LEADWILLPRODUCE
A FORCE
ON
THECOILASSEMBLY
IN THEPOSTIVE(+) DIRECTION.
sawm
DMFONI,
ME
PuN~E Y
8
I"1 M
7
6
5
4
W
1
sse
A. MORCOS
A.
1
1/13/9
990
P.
9
.
3
MAGNETCS DMSION
92069
A
SAMACOS,CA
12 17 98
000""
*ORCm
MCO
DA1E
TOLERANCES:
.x
t 06088
s
NOTES: UNLESSOTHERWISE
SPECIFIED
D
APPOVALS
N. FRENCH
w 9emu
2. DIMENSION
IN BRACKETS
AREMILLIMETERS
[MM] AND AREFORREFERENCE
ONLY.
1. INTERPRET
DIMENSIONS
d TOLERANCES
PERANSIY14.5M-1982.
A
7
22
4
LINEAR
ACTUATOR
eaa
8
LA10-08-000A
B
1 OF I
1
Schaevitz 050 DC-EC L VDT
83
DC-EC AccuSens MT Series
General Purpose LVDT
The DC-EC AccuSens"' Series incorporates a unique
monolithic chip combined with a computer-designed
AC LVDT to achieve premium performance.
The ratiometric design of the monolithic circuitry
compensates for power supply deviations
for continuously stable operation.
Unaffected by input variations, the
transducer provides highly accurate, repeatable measurement.
Innovative manufacturing techniques further enhance the
AccuSens operation and cost efficiency. Micro-miniature
components used in the construction of each unit are
selected for maximum stability.
Vacuum encapsulation of all elements produces an assembly
tolerant to shock, vibration and other forms of physical
abuse. Double magnetic shielding protects against stray
electrical fields.
Input Voltage ................... ±15 VDC (nominal), ±25 mA
Operating Temperature
Range .............................. 321F to 160'F
(01C to 701C)
Survival Temperature
Range .............................. -65*F to 200'F
(-55*C to 95*C)
Null Voltage ..................... 0 VDC
Ripple ................................ Less than 25 mV rms
Linearity ........................... 0.25% full range
Stability ............................. 0.125% full scale
Temperature-Coefficient
of Scale Factor .............. 0.04%/*F (0.08%/*C)
Shock Survival ................. 250 g for 11 milliseconds
Vibration Tolerance ........ 10 g up to 2 kHz
Coil Form Material .......... High density, glass-filled polymer
Housing Material .............. AISI 400 series stainless steel
Cable ................................. 4 conductor, 28 AWG, stranded
copper with braided shield and
polyurethane jacket, 1 meter
EMC ................................... CE certified (The DC-EC series,
when correctly installed, comply
with the EMC Directive 89/336/
EEC generic standards for residential
commercial, light industrial and
industrial environments.)
Output Impedance .......... Less than 1 ohm
Features
Q Linearity 0.25% of FS or better
U CE certified
" Integrated signal conditioning
" Rugged stainless steel construction
" Calibration certificates supplied with all models
App!!cations
U General
" Metric thread core
" Captive core option for convenient installation
C Guided core
Q Small diameter, low mass core
Performance and Electrical Specification
DC-EC Series
Model
Number
050 DC-EC
Scale Factor
V/mm
V/inch
Nominal Linear Range
mm
inches
±0.050
+1.25
Response
-3 dB
Hz
200.0
8.00
500
500
125 DC-EC
±0.125
+3.0
80.0
3.20
250 DC-EC
±0.250
+6.0
40.0
1.60
500
0.80
200
500 DC-EC
±0.500
±12.5
20.0
1000 DC-EC
±1.000
±25
10.0
0.40
200
2000 DC-EC
±2.000
±50
5.0
0.20
200
200
3000 DC-EC
±3.000
±75
3.3
0.13
5000 DC-EC
±5.000
+125
2.0
0.08
200
±10.00
+250
1.0
0.04
200
10000 DC-EC
'All calibrationis performed at room ambient temperature.
North America Tel: 800/745-8008
Internet: www.schaevitz.com
Document Fax Back: 916/431-6541 Europe Tel: (01753) 537622
56
CE:
DC-EC models, when correctly installed,are CE certified to comply
with the EMC Directive 89/336/EEC.
OUTPUT
INPUT
Specify the DC-EC Model followed by the desired option
number(s) added together.
+15VDC
Red
t10VDC
White
Ordering Example:
Model Number 050 DC-EC-200 is an DC-EC Series
LVDT with a ±0.050" range (050 DC-EC), with the
captive core option (200).
-15VDC
Black
Green
signal Common
Power Supply
Common
DC-EC Model Options
Numbe Description
050 DC-EC
Metric Thread Core
006
125 DC-EC
Guided Core
010
250 DC-EC
Small Diameter, Low Mass Core'
020
500 DC-EC
200
Captive Core2
1000 DC-EC
'Consult factory for mass, dimensions and threadsize.
2000 DC-EC
2
Availa ble on 050 DC-EC through 3000 DC-EC
3000 DC-EC
only.
models
DC-EC
5000
10000 DC-EC
in(mm)
Dimensins
Nqew Catv.0r
0.750 t 0.010
(19.05 +0.254)
pto!
Diameter
The DC-EC features a captive
core design that greatly
simplifies installation. The
design utilizes a core rod and
bearing assembly that is captured
and guided within the LVDT
providing low friction travel
throughout the stroke length. The assembly incorporates
two Delrin bearings on the core rod traveling through the
stainless steel boreliner. A bronze bearing on the front end
utilizes a self-aligning feature to accommodate lateral
LVDT movement during operation. The core rod and
bearing assembly are field replaceable. See page 71 for
- ---------- & - - - - -
-0 P
(6.0 +0.127)
0.188 t0.005
(4.78 +0.127)
Diametr
Weight
oz
4-40 UNC-2B (Standard)
M3 x 0.5 - 6H (Metric)
0.38 (9.65) Minimum Depth
-t-er---
TIB
A (Body)
mm
in
Core
Body
Dia meter
-
t 0.762)
specifications.
DC-EC Series
Model
Number
0.236 t 0.005
gm
oz
gm
2
2.10
53.5
0
0
+ 0.762)
~
Dimensions
B (Core)
mm
in
o~a
.e~rrsel
Nominal
Center Positio
of Core at Null
P
in
mm
0.75
19.1
0.50
12.7
050 DC-EC
2.19
62
0.07
125 DC-EC
2.44
69
0.11
3
2.93
74.5
1.25
31.8
0.93
23.6
250 DC-EC
2.58
73
0.18
5
3.80
96.5
2.00
50.8
1.35
34.3
76.0
2.20
55.9
5.49
139.5
3.00
500 DC-EC
2.93
82
0.28
8
1000 DC-EC
4.24
120
0.35
10
7.75
196.9
3.80
96.5
3.18
80.8
11.12
282.5
5.30
135.0
4.88
134.6
2000 DC-EC
5.47
155
0.46
13
3000 DC-EC
9.39
266
0.49
14
16.32
414.5
6.20
157.5
7.55
191.8
5000 DC-EC
11.47
325
0.60
17
20.15
511.8
6.20
157.5
9.53
242.0
10000 DC-EC
15.71
445
0.85
24
35.38
898.5
12.00
305.0
16.58
421.1
g-CHAEVITZ
57
.ZEN50R5
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
86
APPENDIX D
CIRCUIT DIAGRAMS
Temperature Measurement
On Thrust Stand
-Fyi
5V
Thermistors
3X 1.8 kQ
V3
V2
Vi
oGND
e
Voltage divider circuit to determine thermistor resistance.
RmTH
e
=1800*
L_11
Maximum error of 0.2"C between the three assembled thermistors.
87
PWM Averaging & Current Measurement
1.2 kQ
+
1.2 kQ
-W
o
-E
VF
33 pF
EMI from PWM signal
25 Q
75 Q
1.5 A
Fuse
0.5 A
Fuse
20 k~lz
40 V
Voice Coil
33 pF
88
R = 10 Q
L= 1.2 mH
*
The RC circuit averages the amplifier's PWM output to provide a DC voltage across
the voice coil. It has a time constant Tmuch larger than the PWM period of 0.05 ms.
R = 100Q, C = 250tF
T = RC = 25 ms
" The 25 Q and 75 Q resistors also dissipate most of the amplifier's power. This allows
the PWM to run at a duty cycle of about 20% during nominal operation. They are
100 Q ) so that a maximum amplifier output of 40 VDC yields a current
sized ( RDIS
of 0.4 A. This is below the voice coil's current limit of 0.75 A.
IMAx
= 40/RDIS < 0.75 A
e VF is a voltage drop across the 75 Q. The same current that flows through this resistor
must also flow through the voice coil. Force is calculated from this current.
Ivc = VF/
e
75
The boxed area experiences significant electromagnetic noise. Spacing this portion a
few centimeters from the rest of the circuit will reduce its effect.
89
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
90
APPENDIX E
COMMERCIAL CONTROLLER
The Galil DMC-2020 controller and CPS-15-40 amplifier are both property of The
Charles Stark Draper Laboratory, Inc.
They were loaned out for the duration of testing
described in this thesis. As these components must now be returned to Draper Laboratory, a
replacement is necessary.
The Galil DMC-1416 has similar properties to the components described above, and it
comes at a much lower cost. It includes a controller, PWM amplifier, analog input, and is
powered from an AC wall outlet. This is the best replacement option from Galil.
91
DMC-14x5 Series
Product Description
DMC-1415 and
DMC- 1425 Controllers
The DMC-1415 and DMC-1425 are economical, one and
two axis motion controllers with an Ethernet 10Base-T
and RS232 port. They have many of the same high-performance features of Galil's multi-axis Optima controllers, but are designed for just one or two axes.This
offers the user both space and cost-savings.The DMC14x5 controllers are available as acard-level product or
inametal enclosure with power supply. The DMC-1416
includes an integrated PWM drive for brush or brushless motors.
With a32-bit microcomputer, the single and dual
axis controllers provide such advanced features as PID
compensation with
velocity and acceleration feedforward, program memory with
multitasking for simultaneously running two
applications programs,
and uncommitted I/0
for synchronizing
motion with external
events. Ithandles various modes of motion
including point-to-point positioning, jogging, contouring, electronic gearing and ECAM.The DMC-1415 singleaxis controller accepts inputs from two encoders, which
isuseful for electronic gearing applications.The DMC1425 dual-axis controller includes linear and circular
interpolation for precise, coordinated motion.
Like all Galil controllers, the DMC-14x5 controllers
use asimple, English-like command language which
makes them very easy to program. Galil's WSDK servo
design software further simplifies system set-up with
"one-button" servo tuning and real-time display of
position and velocity information. Communication drivers are available for DOS, Linux and all current Windows
operating systems.
Features
" (ard-level and box-level, stand-alone motion controllers
* DMC-1415: 1-axis card or box
DMC- 1425:2-axis card or box
DMC-1416: Box with integrated 6A, 60V servo drive
* Ethernet 1OBASE-T and one RS232 port up to 19.2 kb.
* Ethernetsupports multiple masters and slaves
* The DMC-1425 controls two servos or two steppers
" Accepts up to 12 MHz encoder frequencies forservos.
Outputs up to 3MHz forsteppers
* Advanced PID compensation with velocity and acceleration
feedforward, offsets, notch filter and integration limits
* Modes of motion indudejogging,point-to-pointpositioning, contouring, electronic gearing and ECAM. Accepts input
from auxiliary encoder for DMC- 1415 only.Linear and
circularinterpolation for DMC- 1425 only.
* Over 200 English-like commands directly executable by controller. Includes conditional statements and event triggers
* Non-volatile memory for programs, variables and arrays.
Concurrent execution of two application programs
U Home input and forward and reverse limits
U 2 uncommitted analog inputs with 12-bit ADC
U DMC-1415:7 Uncommitted digital inputs, 3digital outputs
DM(-1425:3 Uncommitted digital inputs, 3 digital outputs
* High-speed position latch
" Use Galil'sIOC-7007orDB-14064 for additional I/0
" Uses 37-pin Dconnector. I(M-1460interconnectmodule
breaks-out 37-pin cable into screw terminals
" DMC- 14x5-Card accepts +5V +/- 12V;
DMC-14x5-BOX accepts 90-260 VAC
" (ompact size:
DMC-1745-CA RD: 3.75"x 5.0"
DMC-145-BOX: 5.1"x3.0"x 6.8"
* DM(-1416 indudes aPWM amplifier for driving brush
or brushless motors up to 60V 6A. Operates offsingle
20-60VD(input
* Communication drivers for all current versions of
Windows, DOS and Linux
* CEcertified
* Custom hardware and firmware options available
www.galilmc.com / Galil Motion Control, Inc.
43
Ethernet/RS232 Econo 1-2 axes
DMC-14x5 Series
Specifications
System Processor
High Speed Position Latch
* Motorola 32-bit microcomputer
U Latches within 0.1 microsecond
Communications Interface
Dedicated I/0
1 Ethernet 10BASET and RS232 port up to 19.2k baud
M Main encoder inputs-Channel A,A-, B,B-,l,I- (± 12 Vor TTL)
U Auxiliary encoder-Channel A,A-, B,B-(not available on DMC-1425)
" Forward and reverse limit inputs
U Home input
U High-speed position latch input
U Analog motor command output with 16-bit DAC resolution
* Pulse and direction output for step motors
* Amplifier enable output
* Error output
* Encoder output compare
Modes of Motion:
* Point-to-point positioning
* Jogging
U Electronic Gearing
N Electronic Cam
N Contouring
U Linear and circular interpolation for DMC-1425
Memory
U Program memory size-500 lines x 80 characters
U 126 variables
* 2000 array elements in up to 14 arrays
Filter
* PID (proportional-integral-derivative) with velocity and
acceleration feedforward
U Notch filter
U Dual-loop control for backlash compensation (DMC-1415/1416)
U Velocity smoothing to minimize jerk
U Integration limits
U Torque limits
U Offset adjustment
U Option for piezo-ceramic motors
Kinematic Ranges
* Position: 32 bit (±2.15 billion counts per move; automatic rollover;
no limit injog or vector modes)
* Velocity: Up to 12 million counts/sec for servo motors
U Acceleration: Up to 67 million counts/sec 2
Uncommitted Digital //0
* DMC-1415/1416:7 TTL inputs; 3TTL outputs
U DMC-1425:3 TTL inputs; 3TTL outputs
U DB-14064:Configurable64TTL I/0
Uncommitted Analog Inputs
U 2individual ±10V analog inputs with 12-bit resolution
(16-bit optional)
44
www.galilmc.com / Galil Motion Control, Inc.
Minimum Servo Loop Update Rate
* 250 microseconds
I 125 microseconds with fast firmware
Maximum Encoder Feedback Rate
* 12 MHz
Maximum Stepper Rate
U 3MHz (Full, half or microstep)
Power Requirements
U DMC-1415 and DMC-1425 cards:
+5V 400mA
-12V 40mA
+12V 40mA
U DMC-1416: requires single 20-60 VDC supply
U DMC-1415/1425 box: accepts 90-260 VAC supply
Environmental
* Operating temperature: 0-700 C
U Humidity: 20-95% RH, non-condensing
Mechanical
U DMC-1415 and DMC-1425 cards:3.75" x 5.0"
U DMC-1415 and DMC-1425 boxes:5.1" x 3.0" x 6.8"
U DMC-1416 box-level:7.64" x 5.49" x 2.32"
Ethernet/RS232 Econo 1-2 axes
DMC-14x5 Series
Ordering Information
QUANTITY 1
DESCRIPTION
DMC-1415-card
1-axis stand-alone with Ethernet& RS232
$ 595
$ 395
DMC-1415-box
DMC-1415 inenclosure with power supply
$ 795
$ 545
DMC-1416-brush
Controller with amplifier for brush motors
$ 995
$ 845
DMC-1416-brushless
Controller with amplifier for brushless motors
$1095
$ 895
DMC-1425-card
2-axis controller for 2 servo motors
$ 695
$ 445
DMC-1425-box
DMC-1425 inenclosure with power supply
$ 895
$ 595
-STEPPER option
Controls 2 step motors instead of 2 servo motors
No extra charge
CABLE 37-pin D
37-pin D-type cable
$ 25
CABLE 9-pin D
9-pin RS232 cable
$ 10
ICM-1460
Interconnect Module for DMC-1400 series. Specify -HAEN
for high amp enable or -LAEN for low amp enable
$ 145
$ 95
ICM-1460-STEPPER
Interconnect for DMC-1425-STEPPER
$ 145
$ 95
ICM-1460-OPTO
ICM with optoisolated inputs and outputs
$ 195
$ 145
ICM-1460-20W
ICM-1460 with 20-watt amplifier
$ 220
$ 145
AMP-1460
ICM with on-board, PWM amplifier for 1 brush-type servo
$ 495
$ 345
DB-14064
Expansion board for 64 1/0
$ 295
$ 195
Galil Utilities
Communication drivers, SmartTERM software
$ 20 for CD; free download
CTOOLKIT
C/C++ documentation and examples
Included with Utilities
WSDK
Set-up, tuning and analysis software
$ 195
ActiveX Tool Kit
Custom ActiveX controls for Visual Basicor Visual C++
$ 595
Upgrade Options
Two sets of PID, anti-friction bias, absolute or 5SI sensors, backlash and
leadscrew error compensation, profile smoothing,anti-resonance profiling,
high-resolution gearing, password protect, memory expansion,
closed-loop steppers, coordinate transformation
Consult factory
One-time set-up charge
-CER
Piezo-ceramic motor option
$ 400 set-up charge
Consult factory
Gal offers additional quantity discounts for purchases between land 100. Consult Galil for a quotation.
48
QUANTITY 100
NUMBER
PART
www.galilmc.com / Galil Motion Control, Inc.
APPENDIX F
MECHANICAL CLAMPING FOR LAUNCH
Bumpers
Balance arm is free to move in a limited region
All components on the arm can survive impact against the bumpers
95
Extendable Pin
Powered during loading periods to extend a pin and clamp the balance arm
Power is cut on orbit and the pin retracts under minimal force
Launch
Actuator is powered and
On Orbit
Actuator is unpowered and
pin retracts
Lantpnd
t7-
96
Actuator is powered and
pin is extended
Retractable Pin
Fixed in the extended position for launch
Retracted in orbit with considerable force
Cannot be re-extended for landing
Launch
Pin is fixed in the extended
position
On Orbit
Pin is pyrotechnically
retracted
Landing
Arm is constrained only by
padded bumpers
97
[ THIS PAGE INTENTIONALLY LEFT BLANK ]
98
REFERENCES
[1]
Haag, T.W. "PPT Thrust Stand," Proceedings of the Thirty-FirstJoint Propulsion
Conference and Exhibit, Sand Diego, CA 1995.
[2]
Haag, T.W. "Design of a Thrust Stand for High Power Electric Propulsion Devices,"
NASA Technical Memorandum 102372, July 1989.
[3]
Wilson, M.J., Bushman, S.S., and Burton, R.L., "A Compact Thrust Stand for Pulsed
Plasma Thrusters," Proceedingsof the Twenty-Fifth InternationalElectric Propulsion
Conference, Cleveland, OH, 1997.
[4]
Gamero-Castano, M., Hruby, V., and Martinez-Sanchez, M., A TorsionalBalance that
Resolves sub-micro-Newton Forces,IEPC-01-235.
[5]
Boccaletto, L. and d'Agostino, L., "Design and Testing of a Micro-Newton Thrust
Stand for FEEP," Proceedingsof the Thirty-Sixth Joint Propulsion Conference,
Huntsville, AL, 2000.
[6]
Jamison, A.J., Muntz, E.P., and Ketsdever, A.D., "Accurate Measurement of NanoNewton Thrust for Micropropulsion System Characterization," Proceedingsof the
Twenty-Seventh InternationalElectric Propulsion Conference, Pasadena, CA, 2001.
[7]
Stark, K.W., Dennis, T., McHugh, D., and Williams, T., "Design and Development of
a Micropound Extended Range Thrust Stand (MERTS)," NASA TN D-7029, August
1971.
[8]
"Hitchhiker Customer Accommodations and Requirements Specifications," NASA
Goddard Space Flight Center, 740-SPEC-008, Greenbelt, MD, 1999.
[9]
Khaymn, V., Advanced PropulsionforMicrosatellites,Doctoral Thesis, MIT, June
2000.
[10]
Thomas, S., Developing a Space Shuttle Experimentfor Hall and Pulsed Plasma
Thrusters, Masters Thesis, MIT, February 2001.
[11]
Stephen, R.J., Rajanna, K., Dhar, V., Kumar, K.G.K., and Nagabushanam, S., "Strain
gauge based thrust measurement system for a stationary plasma thruster,"
Measurement, Science, and Technology, Vol. 12, 2001, pp. 1568-1575.
[12]
Cubbin, E.A., Ziemer, J.K., Choueiri, E.Y., and Jahn, R.G., "Pulsed thrust
measurements using laser interferometry," Rev. Sci. Instrum., Vol. 68, No. 2, 1997, pp.
2339-2346.
99
[13]
Crescini, D., Ferrari, V., Marioli, D., and Taroni, A., "Triaxial Thick Film Load Cell,"
Sensors and Materials, Vol. 5, No. 2, 1993, pp 45-55.
[14]
LaRocca, A.V., Malherbe, P., and Ferrara, J., "Microthrust and Impluse Measurement
Techniques for Electrical Thrusters," Proceedingsof the AIAA
Specialist Conference, Cleveland, OH, 1968.
[15]
4 'h
PropulsionJoint
Barry, N., "Load Cell Performance Using a Novel Electromagnetic Structure,"
Proceedingsof the 3 3 r Universities PowerEngineering Conference, Edinburgh, UK,
1998.
[16]
Viney, D., "Modem strain-gauge load cells in industry," Engineering Technology,
Vol. 1, No. 1, 1998, pp. 14-17.
[17]
"Guidelines for Shuttle Flight Experiment Design, Analysis, Development, Test, and
Mission Operations," NASA Goddard Space Flight Center, 545-PG-8700.2.3, March
1999.
[18]
Mulville, D.R., "Payload Vibroacoustic Test Criteria", NASA-STD-7001, June 1996.
[19]
Mulville, D.R., "Structural Design and Test Factors of Safety for Spaceflight
Hardware," NASA-STD-5001, June 1996.
[20]
Mulville, D.R., "Load Analyses of Spacecraft and Payloads," NASA-STD-5002, June
1996.
[21]
Mulville, D.R., "Fracture Control Requirements for Payloads Using the Space
Shuttle," NASA-STD-5003, October 1996.
[22]
Wertz, J.R., Larson, W.J., Space Mission Analysis and Design, 3 dEdition,
Microcosm Inc., October 1992.
[23]
Schwarz, S.E., Oldham, W.G., Electrical Engineering: An Introduction, 2 "dEdition,
Oxford University Press, New York, NY, 1993.
[24]
Beckwith, T.G., Marangoni, R.D., Lienhard, J.H., Mechanical Measurements,
Edition, Addison-Wesley Publishing Co., Menlo Park, CA, 1993.
100
5 th