LTI System Identification Majid Mirbagheri Postdoctoral Fellow Institute for Learning and Brain Sciences
advertisement

LTI System Identification
Majid Mirbagheri
Postdoctoral Fellow
Institute for Learning and Brain Sciences
System Identification
•What is system identification?
•What is the goal of system identification?
•How is system identification being carried out?
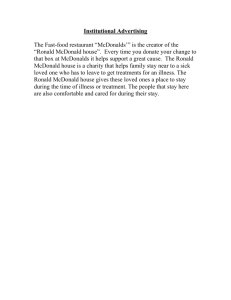
Example
Noise
Sound Signal
U(n)
Auditory Processing +
EEG
Observations
Y(n)
Systems and Signals
u
System
T
y
Systems and signals
A description of the system T should specify how the output signal(s) y depend
on the input signal(s) u.
The signals depend on time: continuous or at discrete time instants.
Several system descriptions are available:
•
•
Continuous versus discrete time
Time domain versus frequency domain
Examples for LTI systems:
•
•
•
•
Frequency Response Function (FRF) or Bode plot
Impulse response of step response
State space model
Transfer function
Ronald Aarts
PeSi/2/1
Frequency Response
The Bode plot of a system G(iω) is the amplitude and phase plot of the
complex function G depending on the real (angular) frequency ω.
It specifies for each frequency ω the input-output relation for harmonic signals
(after the transient behaviour vanished):
• The amplification equals the absolute value |G(iω)|.
• The phase shift is found from the phase angle ∠G(iω).
The output y(t) for an arbitrary input signal u(t) can be found by considering
all frequencies in the input signal: Fourier transform.
Procedure (in principle): Transform the input into the frequency domain, multiply
with the Bode plot or FRF, transform the result back to the time domain.
Ronald Aarts
PeSi/2/2
Ronald Aarts
PeSi/2/1
Impulse Response Function
The impulse response g(t) of an LTI system can also be used to compute the
output y(t) for an arbitrary input signal u(t):
The input signal can be considered as a sequence of impulses with some (time
dependent) amplitude u(t). The outputs due to all impulses are added:
Continuous time signals and systems: Convolution integral
y(t) = (g ∗ u)(t) =
!∞
0
g(τ )u(t − τ ) dτ
Discrete time signals and systems: Summation
y(k) = (g ∗ u)(k) =
Ronald Aarts
∞
"
l=0
g(l)u(k − l)
PeSi/2/3
(k = 0, 1, 2, ...)
Ronald Aarts
PeSi/2/5
Signal characterization
Signal characterisation
M ATLAB’s identification toolbox ident works with time domain data. Even then,
the frequency domain will appear to be very important. Furthermore,
identification can also be applied in the frequency domain.
• Frequency content: Fourier transform
• Energy
• Power
Deterministic or stochastic signals?
Ronald Aarts
PeSi/2/7
Ronald Aarts
PeSi/2/6
Fourier transforms
Continuous-time deterministic signals u(t): Fourier integral:
! ∞
! ∞
1
−iωt
U (ω) =
u(t)e
dt
u(t) =
U (ω)eiωt dω
2π −∞
−∞
For a finite number (N ) of discrete-time samples ud(tk ): Fourier summation:
UN (ωl ) =
N"
−1
k=0
−iωl tk
ud(tk )e
−1
1 N"
UN (ωl )eiωl tk
ud(tk ) =
N l=0
UN (ωl ) with ωl = Nl ωs = Nl 2π
Ts , l = 0, ..., N − 1 is the discrete Fourier
transform (DFT) of the signal ud(tk ) with tk = kTs, k = 0, ...N − 1.
For N equal a power of 2, the Fast Fourier Transform (FFT) algorithm can be
applied.
Ronald Aarts
PeSi/2/8
6
900
10
800
10
4
YN [−]
y [−]
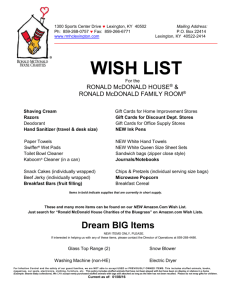
Example: 32768 data samples of the piezo mechanism (left).
700
2
10
0
600
10
0
0.5
t [s]
1
0
10
2
10
f [Hz]
DFT (right) in 16384 frequencies computed with M ATLAB’s fft command.
Horizontal axis in steps of 1/(total measurement time) = 0.925 Hz.
Ronald Aarts
PeSi/2/9
4
10
Energy and power (continuous signals)
Energy spectrum:
Energy:
Ψu(ω) = |U (ω)|2
Eu =
∞
−∞
1
u(t)2dt =
2π
∞
Ψu(ω)dω
−∞
1
|UT (ω)|2
T →∞ T
Power spectrum:
Φu(ω) = lim
Power:
1
Pu = lim
T →∞ T
T
0
1
u(t)2dt =
2π
∞
Φu(ω)dω
−∞
[ UT (ω) is de Fourier transform of a continuous time signal with a finite duration ]
Signal types
1
• Deterministic with finite energy:
"
Eu = Ψu(ω)dω bounded.
Ψu(ω) = |U (ω)|2 limited.
0
• Deterministic with finite power:
"
Pu = Φu (ω)dω finite.
Φu(ω) = T1 |UT (ω)|2 unbounded.
• Stochastic with finite power:
"
Pu = Φu (ω)dω finite.
Φu(ω) = T1 |UT (ω)|2 bounded.
Ronald Aarts
−1
1
0
−1
1
0
−1
0
20
40
60
t [s]
PeSi/2/11
80
100
Ronald Aarts
PeSi/2/10
Energy and power (discrete time signals)
Energy spectrum: Ψu(ω) = |U (ω)|2
Energy:
Eu =
∞
#
2
ud(k) =
k=−∞
(from the DFT)
!
Ψu(ω)dω
ωs
1
|UN (ω)|2
N →∞ N
Power spectrum:
Φu(ω) = lim
Power:
!
−1
1 N#
2
Pu = lim
ud(k) = Φu(ω)dω
N →∞ N
k=0
ωs
Ronald Aarts
PeSi/2/12
(“periodogram”)
Convolution
Convolutions
Continuous time: y(t) = (g ∗ u)(t) =
!∞
0
g(τ )u(t − τ ) dτ
After Fourier transform: Y (ω) = G(ω) · U (ω)
Discrete time: y(k) = (g ∗ u)(k) =
∞
"
l=0
g(l)u(k − l)
(t = 0, 1, 2, ...)
After Fourier transform: Y (ω) = G(ω) · U (ω)
Example: u is the input and g(k), k = 0, 1, 2, ... is the impulse response of the
system, that is the response for an input signal that equals 1 for t = 0 en
equals 0 elsewhere.
Then with the expressions above y(k) is the output of the system.
Ronald Aarts
PeSi/2/13
Stochastic Signals
Realisation of a signal x(t) is not only a function of time t, but depends also on
the ensemble behaviour.
An important property is the expectation:E{ } f (x(t))
Examples: Mean E { }
x(t)
Power E { }
(x(t) − E x(t))2
{ }
Cross-covariance: Rxy (τ ) =E [x(t) − Ex(t)][y(t − τ ) − Ey(t − τ )]
{ }
Autocovariance: Rx(τ ) =E [x(t) − Ex(t)][x(t − τ ) − Ex(t − τ )]
White noise: e(t) is not correlated met signals e(t − τ ) for any τ = 0.
Consequence: Re(τ ) = 0 for τ = 0.
Ronald Aarts
PeSi/2/13
Power density or Power Spectral Density:
Φx(ω) =
!∞
Rx(τ ) e−iωτ dτ
∞
"
Φxd (ω) =
Rxd (k) e−iωkT
k=−∞
−∞
With (inverse) Fourier transform:
1
Rx(τ ) =
2π
Power:
!∞
iωτ
Φx(ω) e
dω
−∞
T
Φxd (ω) eiωkT dω
Rxd (k) =
2π ω
!
s
White Noise
E (x(t) − E x(t))2 = Rx(0) =
1
=
2π
Ronald Aarts
!∞
White Noise PSD
E (xd(t) − E xd(t))2 = Rxd (0) =
T
Φxd (ω) dω
=
2π ω
!
Φx(ω) dω
−∞
s
PeSi/2/15
Ronald Aarts
PeSi/2/14
Systems and models
A system is defined by a number of external variables (signals) and the
relations that exist between those variables (causal behaviour).
v
u
Signals: •
•
•
Ronald Aarts
✲
❄
✗✔
✲
✖✕
G
y
✲
measurable input signal(s) u
measurable output signal(s) y
unmeasurable disturbances v (noise, non-linearities, ...)
PeSi/2/16
Estimators
Suppose we would like to determine a vector θ with n real coefficients of which
the unknown (true) values equal θ0.
An estimator θ̂N has been computed from N measurements.
This estimator is
• unbiased if the estimator E { }
θ̂N = θ0.
• consistent, if for N → ∞ the estimator E{ }
θ̂N resembles a δ-function, or in
other words the certainty of the estimator improves for increasing N .
The estimator is consistent if it is unbiased and the asymptotic covariance
lim covθ̂N = lim E (θ̂N − E θ̂N )(θ̂N − E θ̂N )T = 0
N →∞
N →∞
{ }
Non-­‐parametric (System) Identification
•
t-domain: Impulse or step response
•
f -domain: Bode plot
• Give models with “many” numbers, so we don’t obtain models with a “small”
number of parameters.
• The results are no “simple” mathematical relations.
• The results are often used to check the “simple” mathematical relations that
are found with (subsequent) parametric identification.
• Non-parametric identification is often the first step.
Correlation Analysis
Correlation analyse
Ident manual: Tutorial pages 3-9,10,15;
Function reference cra (4-42,43).
v
u
✲
G0
❄
✗✔
✲
✖✕
y
✲
y(t) = G0(z) u(t) + v(t)
Using the Impulse Response g0(k), k = 0, 1, 2, ... of system G0(z)
y(t) =
∞
!
k=0
g0(k)u(t − k) + v(t)
(t = 0, 1, 2, ...)
So the transfer function can be written as: G0(z) =
∞
!
g0(k)z −k
k=0
⇒ Impulse response of infinite length.
⇒ Assumption that the “real” system is linear and v is a disturbance (noise, not
related to input u).
Ronald Aarts
PeSi/3/2
Ronald Aarts
PeSi/3/1
The Finite Impulse Response (FIR) ĝ(k), k = 0, 1, 2, ..., M , is a model
estimator for system G0(z) for sufficiently high order M :
y(t) ≈
M
!
k=0
ĝ(k)u(t − k)
(t = 0, 1, 2, ...)
Note: In an analysis the lower limit of the summation can be taken less than 0 (e.g. −m) to
verify the (non-)existence of a non-causal relation between u(t) and y(t).
How do we compute the estimator ĝ(k)?
•
•
•
u(t) en v(t) are uncorrelated (e.g. no feedback from y to u!!!).
"
Multiply the expression y(t) = g0(k)u(t − k) + v(t) with u(t − τ )
and compute the expectation.
This leads to the Wiener-Hopf equation:
Ryu(τ ) =
∞
!
k=0
Ronald Aarts
g0(k)Ru (τ − k)
PeSi/3/3
Wiener-Hopf: Ryu(τ ) =
∞
!
k=0
g0(k)Ru (τ − k)
If u(t) is a white noise signal, then Ru(τ ) = σu2δ(τ ), so
g0(τ ) =
Ryu (τ )
R̂yu (τ )
and
ĝ(τ
)
=
σu2
σu2
How do we compute the estimator for the cross covariance R̂yu (τ ) from N
measurements?
Sample covariance function:
N
1 !
N
R̂yu(τ ) =
y(t)u(t − τ )
N t=τ
is asymptotically unbiased (so for N → ∞).
Ronald Aarts
PeSi/3/4
Spectral Analysis
Spectral analyse
Ident manual: Tutorial pages 3-10,15,16;
Function reference etfe (4-53,54),
spa (4-193–195).
v
u
✲
G0
❄
✗✔
✲
✖✕
y
✲
y(t) = G0(z) u(t) + v(t)
Fourier transform (without v): Y (ω) = G0(eiωT )U (ω), so
G0(eiωT ) =
Y (ω)
.
U (ω)
Estimator for G0(eiωT ) using N measurements: ĜN (eiωT ) =
V (ω)
Effect of v: ĜN (eiωT ) = G0(eiωT ) + N
.
UN (ω)
Ronald Aarts
PeSi/3/12
YN (ω)
.
UN (ω)
The estimator ĜN (a)
(b)
(c)
is unbiased.
has an asymptotic variance
1 |U (ω)|2 unequal 0 !
Φv (ω)/ N
N
is asymptotically uncorrelated for different
frequencies ω.
Difficulty: For N → ∞ there is more data, but there are also estimators at more
(=N/2) frequencies, all with a finite variance.
Solutions:
1. Define a fixed period N0 and consider an increasing number of
measurements N = rN0 by r → ∞. Carry out the spectral analysis for each
period and compute the average to obtain a “good” estimator in N0/2
frequencies.
2. Smoothen the spectrum in the f -domain.
Ronald Aarts
PeSi/3/13
Parametric Analysis
Going from “many to “just a few” parameters: a first step
Idea: Try to recognise “features” in the data.
• Immediate function of u(k) and y(k)
• In the spectral models: Are there “features” e.g. like peaks as they are
expected in the Bode plots / FRF (eigenfrequency, ...) of a system with a
complex pole pair.
• In the impulse response (measured or identified):
(1) Recognise “features” (settling time, overshoot, ...).
(2) Realisation algorithms → to be discussed next.
Linear Regression and Least Square Estimate
v
Intermezzo: Linear regression and Least squares estimate
u
ϕi
{ }
Regression:
G0
+
• Prediction of variable y on the basis of information provided by other
measured variables ϕ1, ..., ϕd.
⎡
⎤
ϕ1
⎢ . ⎥
• Collect ϕ = ⎣ . ⎦.
ϕd
• Problem: find function of the regressors g(ϕ) that minimises the difference
y − g(ϕ) in some sense.
So ŷ = g(ϕ) should be a good prediction of y.
• Example in a stochastic framework: minimise E[y − g(ϕ)]2.
Ronald Aarts
PeSi/4/1
y
Ronald Aarts
PeSi/3/24
Ron
v
u
Linear regression:
ϕi
{ }
G0
• Regression function g(ϕ) is parameterised. It depends on a set of
parameters
⎤
⎡
θ1
⎥
⎢
θ = ⎣ .. ⎦.
θd
• Special case: regression function g(ϕ) is linear in the parameters θ.
Note that this does not imply any linearity with respect to the variables
from ϕ.
• Special case: g(ϕ) = θ1ϕ1 + θ2ϕ2 + ... + θdϕd
So g(ϕ) = ϕT θ.
+
y
Lin
Ronald Aarts
PeSi/4/1
Example
Linear regression — Examples:
y [−]
15
Then g(ϕ) = ϕT θ with input vector ϕ =
(
'
and parameter vector θ =
'
x
1
(
0
0
)
*
a
. So: g(ϕ) = x 1
b
• Quadratic function y = c2x2 + c1x + c0.⎡
x2
5
⎤
a
.
b
15
10
5
0
−5
Then g(ϕ) = ϕT θ with input vector ϕ = ⎣ x ⎦
0
1
⎡
⎤
⎡
c2
)
*
⎢
⎥
⎢
2
and parameter vector θ = ⎣ c1 ⎦. So: g(ϕ) = x x 1 ⎣
c0
⎢
Ronald Aarts
PeSi/4/3
⎥
5
x [−]
10
5
x [−]
10
(
'
y [−]
• Linear fit y = ax + b.
10
⎤
c2
⎥
c1 ⎦.
c0
Least-squares estimate (LSE):
• N measurements y(t), ϕ(t),
t = 1, ..., N .
N
1 !
• Minimise VN (θ) =
[y(t) − g(ϕ(t))]2 .
N t=1
• So a suitable θ is θ̂N = arg min VN (θ).
N
1 !
[y(t) − ϕT (t)θ]2.
• Linear case VN (θ) =
N t=1
Ronald Aarts
PeSi/4/4
Linear least-squares estimate (1):
N
1 !
• In the linear case the “cost” function VN (θ) =
[y(t) − ϕT (t)θ]2
N t=1
is a quadratic function of θ.
• It can be minimised analytically: All partial derivatives
zero in the minimum:
N
1 !
2ϕ(t)[y(t) − ϕT (t)θ] = 0
N t=1
∂VN (θ)
have to be
∂θ
The solution of this set of equations is the parameter estimate θ̂N .
Ronald Aarts
PeSi/4/5
Linear least-squares estimate (2):
• A global minimum is found for θ̂N that satisfies a set of linear equations, the
normal equations
⎡
⎣
N
1 !
N t=1
⎤
ϕ(t)ϕT (t)⎦ θ̂
N
1 !
ϕ(t)y(t).
N =
N t=1
• If the matrix on the left is invertible, the LSE is
⎡
θ̂N = ⎣
Ronald Aarts
N
1 !
N t=1
T
⎤−1
ϕ(t)ϕ (t)⎦
N
1 !
ϕ(t)y(t).
N t=1
PeSi/4/6
Linear least-squares estimate — Matrix formulation:
⎡
⎤
y(1)
.. ⎥
⎦,
y(N )
⎡
⎤
T
ϕ (1)
⎢
⎥
..
and the inputs in the N × d regression matrix ΦN = ⎣
⎦.
ϕT (N )
⎢
• Collect the output measurements in the vector YN = ⎣
(
)
T
• Normal equations: ΦN ΦN θ̂N = ΦT
N YN .
†
• Estimate θ̂N = ΦN YN
)−1
(
†
T
ΦT
(Moore-Penrose) pseudoinverse of ΦN : ΦN = ΦN ΦN
N.
†
Note: ΦN ΦN = I.
Ronald Aarts
PeSi/4/7
Example
0.1
Amplitude
0.05
0
-0.05
-0.1
0
0.2
0.4
0.6
Time (s)
0.8
1
1.2
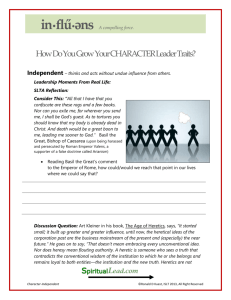
e(n): envelope of speech signal
Sound Signal
φi(n)=e(n-­‐‑i)
Noise
Auditory Processing h(i) = θi
+
EEG
Observations
Y(n)
−5
8 x 10
6
4
2
0
−2
−4
−6
0
50 125
250
Time (ms)
375
500
A priori considerations
Physical insight regarding the (minimal) order of the model.
Physical insight regarding the nature of the noise disturbance.
Relation between the number of data points N and the number of parameters
to be estimated Nθ : General:
N ≫ Nθ
Rule of thumb: N > 10Nθ
Note that the required number of points depends strongly on the signal to noise
ratio.
Ronald Aarts
PeSi/6/29