Document 10694266
advertisement

Polymers (continued)
18.S995 - L08
dunkel@mit.edu
2.1.2
vMF polymer model
Consider an idealized polymer consisting of i = 1, . . . , N segments of length . Each
segment has an orientation µi , so that the vector connecting the two polymer ends is given
by
R(N ) =
N
X
N
X
Ri =
i=1
µi .
(2.5)
i=1
The total length of the polymer is L = N and w.l.o.g. we choose R(0) and µ1 = (0, 0, 1).
We assume that the conditional PDF of µi for a given µi 1 , is a vMF-distribution with
spread parameter ,
f (µi |µi 1 ) = C2 eµi ·µi 1 .
(2.6)
We would like to compute correlation functions and statistical moments of R(N ) in
the limit of large N . Of particular interest are the mean end-position
Karjalainen et al (2014) Polym Chem
E[R(N )|µ1 ] =
N
X
n=1
E[µn |µ1 ],
(2.7a)
the squared end-to-end distance
D(N ) = E[R(N ) · R(N )],
(2.7b)
and the excursion PDF
⇥
pN (r) = E (r
R(N )) .
Mean end-position and persistence length
http://dx.doi.org/10.1039/1759-9962/2010
⇤
(2.7c)
To compute the mean end-position E[R(N )|µ1 ] for a given initial condition µ1dunkel@math.mit.edu
, let us first
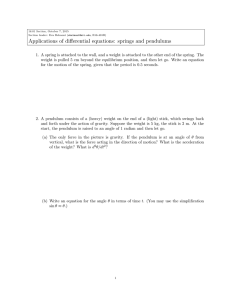
von Mises-Fisher distribution
𝜅 =1
𝜅 =10
𝜅 =100
arrows = mean direction
dunkel@math.mit.edu
2 0, one finds that D !
to
normal
di↵usion.
For
floppy
polymers
with
!
ared end-to-end
distance
D
'
2
= 2 LP .
large
2
, whereas for
(2.20)
large
Computing the double sum (2.15), one D
obtains2
D(N
)
=
E[R(N
)
R(N
(2.7b)
lim D · =
2 2 . )],
(2.19)
Excursion PDF & thermodynamics
!1
lim = 2 .
(2.19)
N
!1
N
2 2 + N
2
That
is, for long sti↵itpolymers
1, we
have
Unfortunately,
is
not) with
possible
compute
the excursion
PDF (2.7c) exactly
for the
D(N
= to
,
(2.17)
e excursion
PDF
2
That is, for long1sti↵ polymers with
1, we(have 1)
vMF model . However, the central limit theorem combined with (2.18c) implies that, for
⇥D ' 2 22 = 2 LP⇤.
large
, thelimiting
excursion
PDF
'
R(N
=2 L
pN (r)
=
ED will
(r2 approach
))P a. . Gaussian
and from
thisNthe
behaviors
(2.20)
(2.20)(2.7c)
◆3/2
Excursion PDF & thermodynamics ✓
2
3 D(N ) =3r2 /(2DN
Excursion PDF & thermodynamics
lim D(N
)
=
lim
N, ) .
(2.18a)
p(r)
'
e
(2.21)
end-position
and
persistence
length
!0
!0
Unfortunately, it is not possible to compute
the excursion PDF (2.7c) exactly for the
2⇡DN
2 2 (2.7c) exactly for the
Unfortunately,
it
is
not
possible
to
compute
the
excursion
PDF
D(N
) =
lim D(N
) = with
N (2.18c)
,
vMF model11 . However, thelim
central
limit
theorem
combined
implies that, for (2.18b)
!1
vMF
model
. excursion
However,PDF
the
central
limit
combined
with (2.18c)
implies
for
pute the
mean
end-position
E[R(N
)|µ1theorem
]we
a given
initial
condition
µ1that,
, of
letthe
us polymer
first
For
remainder
of !1
this
will
assume
that
the end-points
are
large
N the
, the
will section,
approach
afor
Gaussian
N , the
excursion
PDF
will
approach
a |µ
Gaussian
at corresponding
the large
conditional
value
E[µ
be computed
aswhen keeping
fixed
atto
0 expectation
and
r.
To
make
the
connection
with
thermodynamics,
we may consider
◆3/2 1 ] can
n
normal di↵usion✓and ballistic
growth.
Conversely,
<1 r
✓ 3 that
◆3/2can3rbe
2 /(2DN )
as
a
macroscopic
state-variable,
realized
by a number of (2.21)
di↵erent polymer
p(r)
'
e
3
2
fixed but letting the number of monomers
N !3r1,
then
Z
/(2DN
) .n
Y
p(r)
' 2⇡DN PNe If no other
.
(2.21)it is plausible
configurations referred
constraints
are
known,
nto1as microstates.
µ
·µ
2⇡DN
i=2 i i 1
dµ
E[µ
|µ
]
=
C
µ
e
i
D
1
+
n
1
n
2
2
that
each
microstate
is
equally
likely
and,
for
large
N
,
the
number
of microstates
realizing
For the remainder of this section,
we
will
assume
that
the
end-points
of the polymer
are (2.18c)
D()
:=
lim
=
,
For the remainder of this section, we will
assume that thei=2
end-points of the polymer are
3N !1
fixed
at
0
and
r.
To
make
the
connection
with
thermodynamics,
we may consider
r order of the
N
1
a
specific
the
macrostate
r
is
p(r),
assuming
the
spatial
resolution
is
of
the
Z can be with
fixed at 0 and r. To make the connection
thermodynamics,
we may consider r
n
1 of
as segment
a macroscopic
state-variable,
that
realized
by
a
number
di↵erent
polymer
Y
P
length
.
The
corresponding
microcanonical
entropy
is
given
by
n 1
1/2
n
2
µ
·µ
as
a
macroscopic
state-variable,
that
can
be
realized
by
a
number
of
di↵erent
polymer
i
i
1
This configurations
means that,referred
for finite
the
end-to-end
distance
increases
with
corresponding
i=2
microstates.
constraints
aredµ
known,
itNis plausible
= to as,C
µnIf 1noeother
i
2
configurations
referred
to
as microstates.
If with
no other
constraints
are
2
2known, it is plausible
to normal
di↵usion.
For
floppy
polymers
!
0,
one
finds
that
D
!
, whereas for
3r
that each
microstate
is equally
likely
and, for
large
N
,
the
number
of
microstates
realizing
3
i=2
that each microstate is equally likely
for large
N=
, the
realizing
kassuming
p(r)]
S0 number
kB of microstates
. of the order
(2.22)
3S ' and,
B ln[
a
specific
the
macrostate
r
is
p(r),
the
spatial
resolution
is
of
the
· · · r is 3 p(r), assuming the spatial resolution
largea specific the macrostate
2DNis of the order of the
segment
length . The corresponding
microcanonical entropy is given by
n
1
1
segmentThe
length
. The
entropy
is givenspin
by model [Fis64]. (2.8)
= corresponding
µ1equivalent
, microcanonical
vMF polymer
model is
Heisenberg
Dto a classical
2
2
lim
=
2
.
(2.19)
3r
3
2
S ' kB ln[ !1
kB 3r .
(2.22)
3 p(r)]= S0
S
'
k
ln[
p(r)]
=
S
k
.
(2.22)
2DN
B
0
B
g
382DN
That is,1 The
forvMF
longpolymer
sti↵ polymers
with to a classical
1, weHeisenberg
have spin model [Fis64].
model is equivalent
1
The vMF polymer model isNequivalent to a classical
Heisenberg
spin model [Fis64].
N
1
N
X
X
1
2
n D
1 '2 =2 L
nP .
(2.20)
µ1 .
(2.9)
E[R(N )|µ1 ] =
µ1 = 38
µ1 =
38
dunkel@math.mit.edu
1
n=1
n=0
onfigurations
referred to as microstates. are
If no
constraints
are known, it is plausible
@S other2as3k
BT
and the stretch force components
obtained
D '=
2 = 2ri .LP .
(2.20)
(2.25)
i = T
hat each microstate is equally likely fand,
for
large
N
,
the
number
of
microstates
realizing
DN
✓@ri ◆
@S the spatial
3kB T resolution is of the order of the
specific the macrostate r is 3 p(r), fassuming
ri .
(2.25)
i = Tassumed =
Thus
far, our calculations
implicitly
a
microcanonical
setting,
since
we
focussed
on
Excursion
PDF & thermodynamics
@r
DN
i
gment length
.
The
corresponding
microcanonical
entropy
is
given
by
an isolated polymer. In most experiments, polymers are surrounded by liquid molecules
Unfortunately,
is not
possible
excursion
PDF
for the
Thusmay
far, act
our calculations
implicitly
a microcanonical
setting,long
since
we (2.7c)
focussedexactly
on
that
as ait canonical
bath. assumed
If to
thecompute
polymer
is
sufficiently
(thermodynamic
2the
3r
1
3 experiments, polymers
an
isolated
polymer.
In
most
surrounded with
by liquid
molecules
vMF and
model
. S
However,
thep(r)]
central
(2.18c)
that, for
limit)
if the
coupling
polymer
is. combined
sufficiently
weak,
then
oneimplies
can
' kB ln[between
= Slimit
ktheorem
(2.22)
0 and
B bathare
that may
act that
as a microcanonical
canonical
If
the
polymer
is sufficiently
long
(thermodynamic
safely
assume
canonical
ensembles
become
equivalent.
In this
large
N
, the
excursion
PDFbath.
willand
approach
a2DN
Gaussian
limit) fand
if the
polymer
and bath
is sufficiently
weak,
then one
can
1
is the
force
neededbetween
to
a
polymer
in
a
solvent
bath
of
temperature
T
.
The vMF case,
polymer
model
is coupling
equivalent
to stretch
a classical
Heisenberg
spin
model
[Fis64].
✓canonical◆ensembles
3/2
safely
assume
that
microcanonical
and
becomefree-energy
equivalent. In this
Furthermore, it is also instructive to compute
3 the corresponding
3r 2 /(2DN )
' a polymer in a esolvent bath .of temperature T .
(2.21)
case, f is the force needed top(r)
stretch
2⇡DN
3r 2
Furthermore, it is also instructive 38
to compute the corresponding
free-energy
F := E T S = E T S0 + kB T
.
(2.26)
For the remainder of this section, we will assume2DN
that
the end-points of the polymer are
2
3r
F :=
E Tthe
Sversion
=connection
E of
T SHooke’s
T law thermodynamics,
.
(2.26)
0 + kB
fixedis at
0 and ar.thermodynamic
To
make
with
we
may consider r
This
essentially
2DN
as a macroscopic state-variable, that can be realized by a number of di↵erent polymer
3kBlaw
T
This is essentially a thermodynamic K
version
of Hooke’s
2
+ r ,
K
. constraints are known,
(2.27)
configurations referred Fto=asF0microstates.
If =
no other
it is plausible
2
DN
K 2 and, for large
3kB T N , the number of microstates realizing
that each microstate is equally
likely
F = F0 +3 r ,
K=
.
(2.27)
For
long
sti↵
polymers
we
have
DN
'
2
N
L
=
2LL
,
we
find
for
the
spring-constant
P
Pthe spatial resolution is of the order of the
2
DN
a specific the macrostate r is p(r),
assuming
segment
length
. The
entropy
given by
For long sti↵
polymers
we corresponding
have DN ' 2 N
LBPT= 2LLP , we find
for the is
spring-constant
3kmicrocanonical
K=
.
(2.28)
2LLP
2
3k
T
3r
B
3
(2.28)
S ' kBKln[= 2LL
p(r)]. = S0 kB
.
This means, for example, that the persistence Plength Lp can be
inferred from force mea2DN
surements
if temperature T and polymer length L are known.
1
This
means,
example,
that
the persistence
length LHeisenberg
from [Fis64].
force meaThe vMF for
polymer
model
is equivalent
to a classical
spin model
p can be inferred
surements if temperature T and polymer length L are known.
(2.22)
38
39
39
dunkel@math.mit.edu
F := E
TS = E
3r 2
T S0 + k B T
.
2DN
(2.26)
Self-avoidance (Flory’s scaling argument)
This is essentially a thermodynamic version of Hooke’s law
The simplest way of accounting
for
self-avoidance
is
to
include
in
Eq.
(2.27)
K 2
3kB T
F = accounts
F0 + r for
, (Flory’s
K = scaling
. argument)
(2.27)
Self-avoidance
contribution Fe that
excluded
volume
e↵ects.
Consider
a polyme
2
DN
N
1 monomers
ofsimplest
volumeway
vd with
fixed end-to-end
distance
Flory’s
sca
The
of accounting
for self-avoidance
is tor.include
in Eq.
For long sti↵ polymers we have DN ' 2 N LP = 2LLP , we find for the spring-constant
assumes
forcontribution
a fixed |r|,
the
Nterm
monomers
may
roughly)
explore aa pv
accounts
for excluded
volume
e↵ects. Consider
include
additional
freeFenergy
to account
for self(very
repulsion
e that
• IDEA:that
N (Flory’s
1 monomers
vd with
fixed end-to-end
r. Flory
where Self-avoidance
d is the space
dimension.
overlap
probability
for adistance
single monom
3kof
Tvolume
BThe
scaling
argument)
K for
= Self-avoidance
. |r|, the
(2.28) explo
d
(Flory’s
scaling
argument)
Self-avoidance
(Flory’s
scaling
argument)
assumes
that
a
fixed
N
monomers
may
(very
roughly)
2LL
the
filling
fraction
=
vfor
ASSUMPTIONS:
dPN/|r| . Assuming short-range repulsion,
• volume
The simplestwhere
way of
accounting
self-avoidance
is to include
in Eq. for
(2.27)
a free-e
d
is
the
space
dimension.
The
overlap
probability
a
single
m
The
simplest
way
of
accounting
for
self-avoidance
is
to
include
The
simplest
way
of
accounting
for
self-avoidance
is
to
include
in
Eq.
(2.27)
a
free-energy
extensive,
we have
particles
(Flory’s
scaling
argument)
d
Fe for
that
for excluded
Consider
a polymer
This
means,
forcontribution
example,
that
theNaccounts
persistence
length Lvolume
can bee↵ects.
inferred
from force
mea- consis
p vd
the for
volume
filling
fraction
=
N/|r|
.forAssuming
short-range
repu
contribution
Fe Consider
that
accounts
excluded
volume
contribution Fe that accounts
excluded
volume
e↵ects.
a polymer
consisting
of e↵ects. Cons
N self-avoidance
1 monomers
of
volume
vind for
with
fixed
end-to-end
distance
r. Flory’s
scaling
arg
(i)temperature
if
T
and
polymer
length
L
are
known.
ysurements
ofNaccounting
for
is
to
include
Eq.
(2.27)
a
free-energy
extensive,
we
have
N
particles
N
1
monomers
of
volume
v
with
fixed
end-to-end
distance
1 monomers of volume vd with fixed end-to-end distance r. Flory’sdvscaling
argument
N
d
assumes
that fore↵ects.
a fixed Consider
|r|,Fassumes
the
N
monomers
may
(very
explore
a volume
d (very
hatassumes
accounts
for for
excluded
aN
polymer
consisting
ofthe aroughly)
a=fixed
Nvolume
monomers
may
rougho
kthat
N explore
k|r|,
,
that
a fixedvolume
|r|, the N monomers
may
(very
roughly)
of
|r|
,
e '
B Tfor
BT
(ii)
d a single
vd Nprobability
where
d
is
the
space
dimension.
The
overlap
probability
for
monomer for
is giv
|r|
where
d
is
the
space
dimension.
The
overlap
a
s of
volume
v
with
fixed
end-to-end
distance
r.
Flory’s
scaling
argument
where d is dthe space dimension. The overlap probabilitydF
for
a
single
monomer
is
given
by
'
N
k
T
=
N
k
T
,
e
B d
B d
d
the
volume
filling
fraction
=
v
N/|r|
.
Assuming
short-range
repulsion,
so tha
the
volume
filling
fraction
=
v
N/|r|
.
Assuming
short-ra
(iii)
d volume
overlap
probability
given
by
filling
fraction
a fixed
|r|,
the
N
monomers
may
(very
roughly)
explore
a
volume
of
|r|
,
d
|r|
d
the volume filling fraction = vd N/|r| . Assuming short-range repulsion, so that F is
extensive,
we haveisfor
N particles
havefor
forthe
N
aceextensive,
dimension.
The
probability
forparticles
athermal
single monomer
given
by Adding Fe to Eq. (2.27)
where
khave
accounts
kinetic
energy.
B Toverlap
we extensive,
for
N we
particles
d
where kBshort-range
T accountsrepulsion,
for the thermal
to Eq.
g fraction
=
v
N/|r|
so that kinetic
F is energy. Adding Fve N
d
dimensions . Assuming
39
d
vF
dN
v
N
'
N
k
T
=
N
k
T
,
dimensions
ve for N particles
d
e
B
B
d
= N kB T
,
e '
Fe ' N kB T =FN
kBN
T kB Td , ✓
(2.29)
|r|
|r|✓d 2 ◆
◆
|r|
v
N
|r|
d
2
d
vd NF = F + N k T
vd N
|r| d
+
.
where
kB TFB
accounts
for
the
thermal
kinetic
energy.. Adding F
0
F e ' N kB T = N kB T
,
(2.29)
=
F
+
N
k
T
+
0
B
d
2
d
d
where kfor
accounts
the dimensions
thermal
kinetic F
energy.
we fin
where kB T accounts
thermal
kinetic
energy. Adding
(2.27),
wee to
find
in 2(2.27),
d
|r|
2D
|r|for
B Tthe
e to Eq.Adding
|r|
2DEq.
d NF
dN
dimensions dimensions
✓
◆
2
nts for the thermal kinetic energy.
Adding
F
to
Eq.
(2.27),
we
find
in
d
vdexpression
N this|r|express
d w
e
✓
◆ must
To obtain thedistance
equilibrium
distance
r⇤F,minimize
we
must
minimize
✓
◆
To obtain the equilibrium
r
,
this
2 we
=
F
+
N
k
T
+
.
⇤
2
0
B
vd N
|r| d vd N
d
2
|r|
d
|r|
2Dd N
r
=
|r|,
which
gives
F
=
F
+
N
k
T
+
.
(2.30)
0
B
F
=
F
+
N
k
T
+
.
B 2
r = |r|, which✓gives
d0
|r|
2D
N |r|d
◆
d
2Dd N 2 dunkel@math.mit.edu
2
vd N
|r| d
To obtain the equilibrium distance r⇤ , we must minimize this
extensive,
wefilling
have for
N particles
the volume
fraction
= vd N/|r|d . Assuming short-range repulsion, so that F is
extensive, we have for N particles
vd N
F e ' N kB T = N kB T
,
(2.29)
d
Self-avoidance (Flory’s scaling argument)
v|r|
dN
F e ' N kB T = N kB T
,
(2.29)
d
|r|
where
k
B T accounts for the thermal kinetic energy. Adding Fe to Eq. (2.27), we find in d
The simplest way of accounting for self-avoidance is to include in Eq. (2.27)
dimensions
where kB T accounts for the thermal kinetic energy. Adding Fe to Eq. (2.27), we find in d
contribution
Fe that accounts for✓ excluded2 volume
e↵ects. Consider a polyme
◆
dimensions
vd N
|r| d
= F0 + N kv
T with
✓ d +
◆.
N
1 monomers ofF volume
fixed
end-to-end
distance (2.30)
r. Flory’s sca
Bd
|r|
vd N 2D
|r|d2Nd 2
F = F|r|,
kB T N monomers
+
. may (very roughly)
(2.30)explore a v
0 + Nthe
assumes that for a fixed
d
2
|r|
2Dd N
To obtain the equilibrium distance r⇤ , we must minimize this expression with respect to
where
dwhich
isthethe
space dimension. The overlap probability for a single monom
rTo
= |r|,
gives
obtain
equilibrium distance r⇤ , we must minimize this expression with respect to
d
ther =volume
filling
fraction
=
v
N/|r|
. Assuming short-range repulsion,
|r|, which gives
d
dF
vd N
d
= particles
= d d+1 +
r⇤
(2.31)
extensive, we have for0 N
2
dF
v
N
d
d|r|
D N
rd
0=
= d ⇤d+1 + d 2 r⇤
(2.31)
d|r|
D
N
r⇤
d
and therefore
vd N
F e ' N kB T = N kB T
,
and therefore
d
|r|
r⇤ = (Dd vd )1/d+2 N 3/(d+2) .
(2.32)
r⇤ = (Dd vd )1/d+2 N 3/(d+2) .
(2.32)
Thus, explicitly
where
k
T
accounts
for
the
thermal
kinetic
energy.
Adding
F
to
Eq.
(2.27)
B
e
Thus, explicitly
dimensions
d=1:
r⇤ / N
(2.33a)
= 21 ::
/N
N 3/4 ,✓
(2.33a)
dd =
rr⇤⇤ /
(2.33b)
◆
2
3/4
3/5 , vd N
d
=
2
:
r
/
N
(2.33b)
|r|
d
⇤
d=3:
r⇤ / N .
(2.33c)
Fd ==3 F
+
N
k
T
+
.
: 0
r⇤ / B
N 3/5 . |r|d
(2.33c)
2
2D
dN
The result is trivial for d = 1, seems to be exact for d = 2 when compared to simulations,
0.589...for d = 2 when compared to simulations,
Theisresult
is trivial
for dnumerical
= 1, seems
to be N
exact
and
very close
to best
results
for d = 3.
Toand
obtain
the toequilibrium
r⇤ ,forwe
minimize this expression w
is very close
best numerical distance
results N 0.589...
d =must
3.
r = |r|, which gives
dunkel@math.mit.edu
Karjalainen et al (2014) Polym Chem
persistent RW model
Next: mechanistic model
dunkel@math.mit.edu
2.2
Bead-spring model
To2.2
obtain aBead-spring
simple dynamical model
for the motion of a polymer in a solvent fluid, we
model
Rouse
model
simple dynamical
model
for (wiki)
the motion
of a polymer in a solve
can consider a chain consisting of ↵ =To1,obtain
. . . , Na beads,
representing
monomers
at posi2.2
Bead-spring
model
a chain consisting
of ↵ = 1, .we
. . , may
N beads
represent monomers at p
tions
X
(t).
Neglecting
inertial
e↵ectsconsider
andthehydrodynamic
interactions,
assume
To
obtain
a
simple
dynamical
model
for
motion
of
a
polymer
in
a
solvent
fluid,
wecan
can
2.2
Bead-spring
model
↵
To obtain a simple dynamical model for theNeglecting
motion inertial
of a polymer
in hydrodynamic
a solvent fluid,
we
e↵ects
and
interactions,
we may assume t
2.2
Bead-spring
model
that
the
dynamics
of
a
single
bead
is
governed
by
the
over-damped
Langevin
equation
consider
a
chain
consisting
of
↵
=
1,
.
.
.
,
N
beads
represent
monomers
at
positions
X
(t).
↵
obtain
a simple dynamical
model
forics
the
of a polymer
in abysolvent
fluid, we
can
of amotion
single
bead
ismonomers
governed
thepositions
over-damped
Langevin
equation
considerTo
a
chain
consisting
of
↵
=
1,
.
.
.
,
N
beads
represent
at
X
(t).
↵
p
To
obtain
a
simple
dynamical
model
for
the
motion
of
a
polymer
in
a
solvent
fluid,
we
can
Neglecting
inertial
e↵ects
and
hydrodynamic
interactions,
we
may
assume
that
the
dynamspring
model
consider
a chain
consisting
of
↵r
=x1,
. .({X
.,N
beads
represent
monomers
at that
positions
X ↵p
(t).
dX
(t)
=
U
})
dt
+
2D
⇤
dB
(t),
(2.34)
↵
↵
↵
↵
Neglecting
inertial
e↵ects
and
hydrodynamic
interactions,
we
may
assume
the
dynamTo
obtain
a
simple
dynamical
model
for
the
motion
of
a
polymer
in
a
solvent
fluid,
we⇤ dB
can↵ (t),
dX
(t)
=
r
U
({X
})
dt
+
2D
consider
a single
chain consisting
of ↵ = by
1, . the
..,N
beads represent
monomers
X ↵ (t).
↵
xat
↵
↵ positions
ics
of
bead
is
governed
over-damped
Langevin
equation
inertial
e↵ects and
interactions,
we equation
may assume that the dynamp
of a Neglecting
single
bead
governed
by hydrodynamic
the
over-damped
Langevin
consider
chain
consisting
ofin
↵a=solvent
1,
.
.
.
,
N
beads
represent
atthe
positions
Xpotential
where
D
is inertial
theisamotion
thermal
di↵usion
constant
of
a
bead.
The
potential
contains
contributions
e ics
dynamical
model
for
the
of
a and
polymer
fluid,
we
can
Neglecting
e↵ects
hydrodynamic
interactions,
we
mayUmonomers
assume
that
dynam↵ (t).
where
D
is
the
thermal
di↵usion
constant
of
a
bead.
The
U contai
ics↵ of
a .single
bead is
governed
by r
the
over-damped
Langevin
equation
dX
(t)
=
U
({X
})
dt
+
2D
⇤
dB
(t),
(2.34)
p
↵
x
↵
↵
↵
onsisting ofics
=
1,
.
.
,
N
beads
represent
monomers
at
positions
X
(t).
from
elastic
nearest
neighbor
interactions
U
,
from
bending
U
and,
to
implement
selfinertial
e↵ects and
hydrodynamic
interactions,
assumeUthat
thebending
dynam-Ub and, to
↵
ofNeglecting
a single bead
is governed
by the
over-damped
equation
e
b we may
pLangevin
from
elastic
nearest
neighbor
interactions
e , from
dX
(t)
=
r
U
({X
})
dt
+
2D
⇤
dB
(t),
(2.34)
↵
↵
↵ (t),
↵
p2D
e↵ects andavoidance,
hydrodynamic
interactions,
we
may
assume
the
dynamshort-range
U the
: that
dX ↵ (t)
=xrepulsion
rxconstant
({X
+
⇤ dB
(2.34)
ics ofDasteric
bead
isdi↵usion
governed
Langevin
where
issingle
the
thermal
ofover-damped
adt
bead.
The
potential
Uequation
contains
↵ })
↵
↵ Uby
avoidance,
steric
short-range
repulsion
U : contributions
dX
(t)
=
r
U
({X
})
dt
+
2D
⇤
dB
(t),
(2.34)
↵
x↵
↵
↵
p
d where
is governed
by
the
over-damped
Langevin
equation
from
elastic
nearest
neighbor
interactions
U
,
from
bending
U
and,
to
implement
selfDwhere
is theDthermal
di↵usion
constant
of
ae of
bead.
potential
U
contributions
e The
bcontains
U
=
U
+
U
+
U
(2.35)
is the thermal
constant
a
bead.
The
potential
U
contains
contributions
pdi↵usion
b
s
dX
(t)
=
r
U
({X
})
dt
+
2D
⇤
dB
(t),
(2.34)
U
=
U
+
U
+
U
↵
x↵
↵
↵
e
b
s
where
D
is
the
thermal
di↵usion
constant
of
a
bead.
The
potential
U
contains
contributions
avoidance,
: from
dX ↵ (t)
=
rxelastic
})
dt +short-range
2Dinteractions
⇤ dBinteractions
(t),
(2.34)
from
elastic
nearest
neighbor
UeU, U
bending
self↵steric
↵repulsion
↵ U ({Xnearest
b band,
from
neighbor
,
from
bendingUµU
and, to
to implement
implement selfe
Defining
(N
1)
chain
link
vectors
R
and
their
orientations
by
(N
1)bending
chain
and their
orientations
µ↵ by
↵Defining
where
is the thermal
di↵usion
a bead.
Thelink
potential
UR↵contains
contributions
fromsteric
elasticDnearest
neighbor
interactions
Ue , of
from
U↵b vectors
and, to
implement
selfavoidance,
repulsion
: constant
avoidance,
steric
short-range
repulsion
U
rmal
di↵usion
constantshort-range
of a bead.
The
potential
UUcontains
contributions
U
=:Ue +
Ub + Us
(2.35)
avoidance,
steric short-range
repulsion
U:
from elastic
nearest neighbor
interactions
Ue , from
R↵ bending Ub and, to implementRself↵
st neighbor interactions Ue , from bending
U
and,
to
implement
selfb↵+1
R
=
X
X
,
µ
=
(2.36)
R
=
X
X
,
µ
=
↵
↵
↵
↵+1
↵
↵
↵
=+
UeU+
UUbU
Us orientations µ↵ by
(2.35)
Defining
(N steric
1) chain
linkUvectors
R
their
=U
U
+
(2.35)
avoidance,
short-range
repulsion
:+
band
hort-range repulsion
U:
U e= Ue↵ +
Ub +s Us ||R↵ ||
(2.35) ||R↵ ||
Rµ
(N
1) +
chain
link vectors
R↵over
and
their
orientations
µ↵by
by
↵ interactions
the
potentials
can
be
written
as sums over 2-body and 3-body
the
potentials
can
be
written
as
sums
2-body
and
3-body
U
=
U
+
U
+
U
(2.35) interaction
DefiningDefining
(N
1)
chain
link
vectors
R
and
their
orientations
e
b
s
U
=
U
+
U
U
(2.35)
↵
X ↵their
, orientations
µ↵ =
(2.36)
↵ ↵ by
s linkR
↵ = X ↵+1
Defining (Ne 1)b chain
vectors
R↵ and
µ
||R
N
1
↵ ||
N
1
R
X
↵
X
Defining
1) chain
vectors R andµtheir
µ↵ by u(||R ||),(2.36)
Rorientations
chain link vectors
R↵ and(N
their orientations
µ↵+1
↵
R↵U=link
X
=
R
↵ by X ↵ ,↵
↵
↵
U
=
e
=as
||),
the potentials can
written
sums
interactions ↵ (2.37a)
R↵be=R
X
X
, over
µ↵ µ=↵ =and
(2.36)
e X
=
X
(2.36)
||R3-body
↵ u(||R
↵ ↵+1
↵+1
↵ , ↵ 2-body
↵ ||
R↵
↵=1
||R||R
↵ ||↵ || R↵
↵=1N 1
R↵ the
= Xpotentials
X
,
µ
=
(2.36)
R↵sums
= XX
X ↵ , and µ
(2.36)
↵+1
↵ can be↵written as
↵+1 2-body
N
2
over
3-body
interactions
↵ =
X
||R
||
N
2
↵
||R
||
↵
the potentials
be written
as
over
2-body
and
3-bodyinteractions
interactions
the potentials
can becan
written
as sums
over
2-body
3-body
Ue sums
=X
u(||R
||),
(2.37a)
↵and
U
=
b(µ
·
µ
),
b
N
1
↵
↵+1
Ub =interactions
b(µ
·
µ
),
(2.37b)
X
be written as sums
over
2-body
and
3-body
↵
↵+1
↵=1
N
1
the potentials can be written
as
sums over 2-body and 3-body interactions
↵=1
N
1 ↵=1
X
U
=
u(||R
||),
(2.37a)
X
e
↵
N
2
N
1
N
N
X
X
Ue = u(||R
u(||R
X X (2.37a)
N
1 ↵ ||),
N
N||),
U
=
(2.37a)
X
↵=1
e
↵
X
X
Ue =
u(||R↵ ||),
(2.37a)
Ub U=↵=1
b(µ
·
µ
),
(2.37b)
U
=
s(||X
X ||).
s
↵ (2.37a)
↵
↵+1
=
u(||R
||),
N
2
e
↵
U
=
s(||X
X
||).
(2.37c)
↵=1
s
↵
X
↵=1
↵=1
↵=1 =1, 6=↵
N
2
X
↵=1
Ub N
= 2 ↵=1 Nb(µ
·↵µ↵+1 ),
(2.37b)
=1, ↵6=N
N
X2
X
Ub X
= ↵=1X
b(µ
·
µ
),
(2.37b)
Specifically,
the steric repulsion po
N
↵2
↵+1the elastic spring potential u(r) and
X
USpecifically,
=
b(µ
·
µ
),
(2.37b)
b
U
=
b(µ
·
µ
),
(2.37b)
↵
↵+1
the elastic bspringUpotential
ands(||X
the ↵steric
potential
s(r)
en- b(q) involves 3-bod
X repulsion
||).
(2.37c)
s =↵=1code
↵ u(r)
↵+1
2-body
interactions,
whereas
the
bending
potential
N
N
U
=
b(µ
·
µ
),
b
↵=1
↵
↵+1
2 (2.37b)
X
↵=1X
=1, potential
6=↵
code 2-body
interactions, whereas
bending
b(q)
involves
3-body
interactions.
↵=1the
N
N
choices
are
X
N
N
↵=1 s(||X
Us = XPlausible
X ||).
(2.37c)
↵
X
X
N
N
Plausible
choices
are
Us||).X
= potential
s(||X
||). repulsion potential
X=1,
↵ theX
the
elastic
u(r)
s(r)2 enN 6=
Nand
Us Specifically,
=
s(||X
Xspring
(2.37c)
Ksteric
B (2.37c)
S e r/
↵=1
↵ X
↵
X
2
u(r) X
= ||).
(r involves
) S, e r/3-body
b(q) = interactions.
(q (2.37c)
1) , 2 s(r) =
↵=1
s(||X
=1,
6=↵
K Us =whereas
B
↵
code↵=1
2-body
interactions,
the
bending
potential
b(q)
=1, 6=↵
U
=
s(||X
X
||).
(2.37c)
2
2
2
2
r⌫
s
↵
= (r spring
) , potential
b(q) =u(r)(qand1)the, steric
s(r)repulsion
=
(2.38)
Specifically, u(r)
the elastic
potential
s(r)
en↵=1
=1, 6=↵=1
↵ 2 =1,
Plausibleu(r)
choices
2are
r⌫canpotential
6=↵1.
Specifically,
the
elastic
spring
potential
u(r)
and
the
steric
repulsion
s(r) en2
for
some
⌫
>
Although
(2.34)
onlyinteractions.
bedunkel@math.mit.edu
solved
numerically,
we know
lastic spring
potential
and
the
steric
repulsion
potential
s(r)
encode 2-body interactions, whereas the bending potential b(q)
involves
3-body
2
r/
2
for some
⌫ >interactions,
1. Althoughwhereas
(2.34) can
solved
numerically,
we
know
thatisinteractions.
the
associcode
2-body
theonly
bending
potential
b(q)
involves
3-body
atedbestationary
equilibrium
distribution
given
by
2.2
Bead-spring model
Defining (N
2.2
1) chain link vectors R↵ and their orientations µ↵ by
Bead-spring model
R↵ = X ↵+1
2.2
X↵ ,
R↵
µ↵ =
||R↵ ||
Rouse model (wiki)
(2.36)
Bead-spring model
potentials
can be written
sums
2-body
3-body interactions
To obtainthe
a simple
dynamical
modelasfor
theover
motion
of and
a polymer
in a solvent fluid, we can
2.2 Bead-spring model
To obtain a simple dynamical modelNfor1 the motion of a polymer in a solvent fluid, we can
consider a chain consisting of ↵ = 1, . . . ,X
N beads represent monomers at positions X ↵ (t).
consider
a chain
ofUe↵ =
. . . ,u(||R
N
beads
monomers
at that
X ↵ (t).
= 1,model
||), represent
↵the
Neglecting
inertial
e↵ects
and dynamical
hydrodynamic
interactions,
weofmay
assume
the (2.37a)
dynamTo obtain
aconsisting
simple
for
motion
a polymer
inpositions
a solvent
fluid, we can
inertial
e↵ects and
interactions,
we equation
may assume that the dynam↵=1
ics of a Neglecting
singleconsider
bead
isa governed
by hydrodynamic
theofover-damped
Langevin
chain consisting
↵N =2 1, . . . , N beads
represent
monomers at positions X ↵ (t).
ics of a single bead is governed by the
Langevin equation
Xover-damped
p interactions,
Neglecting inertial e↵ects
and
hydrodynamic
the dynamp ⇤ dB (t),we may assume that
Uxb↵ U=({X ↵ })
b(µdt
µ↵+12D
),
(2.37b)
dX ↵ (t)
=
r
(2.34)
↵ ·+
↵ (t),
dX (t) = r U ({X }) dt + 2D ⇤ dB
(2.34)
ics of a single bead↵ is governed
by the
equation
x↵ ↵=1
↵ over-damped Langevin
↵
p
N
N
where Dwhere
is theDthermal
di↵usion
constant
of
a
bead.
The
potential
contributions(2.34)
X
is the thermal di↵usion
bead.
Ucontains
contains
contributions
dX ↵ (t)constant
=X
rx↵of
Ua({X
dt +potential
2D ⇤ U
dB
↵ })The
↵ (t),
Us interactions
=
s(||X
X ||).
(2.37c)
↵
from elastic
nearestnearest
neighbor
interactions
Ue , Ufrom
bending
Ub band,
selffrom elastic
neighbor
and, to
to implement
implement
selfe , from bending U
whereshort-range
D is the thermal
di↵usion
of a bead. The potential U contains contributions
avoidance,
steric
repulsion
U↵=1
: constant
avoidance,
steric short-range
repulsion
U=1,
: 6=↵
from elastic
nearestspring
neighbor
interactions
, from
bending
Ub potential
and, to implement
Specifically,
the elastic
potential
u(r) andUethe
steric
repulsion
s(r) en- selfUeU+
UUbU
+s Us
(2.35)
U =UU
(2.35)
steric short-range
repulsion
:potential
2
e=+
b+
codeavoidance,
2-body interactions,
whereas
the
bending
b(q) involves 3-body interactions.
Plausible
choices
are vectors
1) chain
link vectors
R↵ U
and
by
= their
Ueorientations
+ orientations
Ub + Us µµ
(2.35)
DefiningDefining
(N
1)(Nchain
link
R↵ and
their
↵ ↵by
r/
K
B
S
e
R
2
2
↵
Definingu(r)
(N = 1) (r
chain
vectors
andµtheir
µ⌫↵ by
)link
, ↵+1
b(q)
1)
(2.38)
↵ s(r) =
R↵ =
X
X=↵R,↵ (q
=,Rorientations
(2.36)
↵
2
2
r
R
=
X
X
,
µ
=
||R↵ ||distribution known (2.36)
Needs to be solved
numerically
↵
↵+1
↵ but stationary
↵
||R↵ || R↵we know that the associfor
some
⌫
>
1.
Although
(2.34)
can
only
be
solved
numerically,
R↵sums
= Xover
X ↵ , and µ
(2.36)
↵+1 2-body
the potentials can be written as
3-body
interactions
↵ =
||R
||
↵
ated stationary
equilibrium
distribution
is givenand
by 3-body interactions
the potentials
can be written
as sums
over
2-body
N
1
2-body and 3-body interactions
X
the potentials can be written
as
sums
over
1
U ({X ↵ })
N
1
= })
u(||R
(2.37a)
X
e({x
↵ ||),
pU
=
exp
,
(2.39)
N
↵
N
1
D
Ue =
u(||R
(2.37a)
↵=1 ZNX
↵ ||),
Ue N
=2
u(||R↵ ||),
(2.37a)
↵=1
X
where
!
↵=1
Ub Z
= 2 N b(µ
(2.37b)
N
),
↵ · µ↵+1
X
Y N 2
U ({x↵ })
↵=1 3 X
Ub ZN==
b(µ
(2.37b)
d↵ x· ↵µ↵+1
exp),
.
(2.40)
N
N
Ub X
= X b(µ↵ · µ↵+1
(2.37b)
D),
↵=1 ↵=1
↵=1 s(||X ↵
Us =
X ||).
(2.37c)
N
N
X potential
X=1,
N 6=↵ X
N
2
X
In principle, one could still include a↵=1
contribution
Ut that penalizes twisting, which would
U
=
s(||X
X
(2.37c)
s
↵ s(||X
X ||).
have to involve 4-bead interactions,
forUdefining
three ||).
subsequent
vectors {µ↵ 1 , µ↵ , µ
}. (2.37c)
s = ‘twist’ requires
↵
↵+1
Specifically, the elastic spring ↵=1
potential
u(r)
and
the
steric
repulsion
potential
s(r)
en=1, 6=↵=1
↵
=1, 6=↵
2
dunkel@math.mit.edu
code 2-body interactions, whereas the bending potential b(q) involves 3-body interactions.
41
Karjalainen et al (2014) Polym Chem
persistent RW model
mechanistic model
continuum model
http://www.uni-leipzig.de/~pwm/web/?section=introduction&page=polymers
dunkel@math.mit.edu
2.3 Continuum
Continuum description
description
2.3
2.3
description
2.3.1 Continuum
Di↵erential geometry
of curves
2.3.1 Di↵erential geometry of curves
3
ConsiderDi↵erential
a continuous curve
r(t) 2 3Rof
, where
t 2 [0, T ]. Assume that the first three
2.3.1
geometry
curves
Consider a continuous...curve r(t) 2 R , where
t 2 [0, T ]. The length of the curve is given
derivatives ṙ(t), r̈(t), r (t) are linearly 3independent. The length of the curve is given by
by
Consider a continuous curve r(t) 2 R , where t 2 [0, T ]. Assume that the first three
Z
...
Z TT
derivatives ṙ(t), r̈(t), r (t) are linearly independent.
The length of the curve is given by
L=
dt ||ṙ(t)||
(2.41)
Z
L = 0T dt ||ṙ(t)||
(2.41)
0
L
=
dtEuclidean
||ṙ(t)|| norm. The local unit tangent (2.41)
where ṙ(t) = dr/dt and || · || denotes the
vector
0
where
ṙ(t) by
= dr/dt and || · || denotes the Euclidean norm. The local unit tangent vector
is defined
is defined
where
ṙ(t)by
= dr/dt and || · || denotes the Euclidean norm. The local unit tangent vector
ṙ
is defined by
t = ṙ .
(2.42)
||
ṙ||
(2.42)
t = ṙ .
||
ṙ||
t = vector,
.
(2.42)
The unit normal vector, or unit curvature
is
||ṙ||
The unit normal vector, or unit curvature vector, is
(I vector,
tt) · r̈is
The unit normal vector, or unit curvature
n=
.
(2.43)
(I tt)
||(I
tt) ·· r̈r̈||
n = (I tt) · r̈ .
(2.43)
n = ||(I tt) · r̈||.
(2.43)
Unit tangent vector t̂(t) and unit normal
n̂(t) span the osculating (‘kissing’) plane
||(I vector
tt) · r̈||
at point
t. The
unitt̂(t)
binormal
vector
is defined
Unit
tangent
vector
and unit
normal
vectorby
n̂(t) span the osculating (‘kissing’) plane
Unit
tangent
vector
t̂(t)
and
unit
normal
vector
n̂(t)
span
... the osculating (‘kissing’) plane
at point t. The unit binormal vector
is
defined
by
(I is tt)
· (I bynn) · r
at point t. The unit binormalb =
vector
defined
(2.44)
... .
||(I
tt)
·
(I
nn)
·
r
||
(I tt) · (I nn) ...
b = (I tt) · (I nn) · r... .
(2.44)
b
=
.
(2.44)
||(I
tt)
·
(I
nn)
·
r
||
...
The orthonormal basis {t(t), n(t),
the local
||(I b(t)}
tt) ·spans
(I nn)
· r || Frenet frame. For plane curves,
...
r (t)orthonormal
is not linearly
independent
ṙ and
r̈. Inthe
this
case,
we setframe.
b = n ^ t.
The
basis
{t(t), n(t),ofb(t)}
spans
local
Frenet
The The
orthonormal
basis {t(t),
n(t),the
b(t)}
spans the
localofFrenet
frame.
For1/
plane curves,
localcurvature
curvature
(t) and
and
associated
radius
curvature
⇢(t)
... The local
(t)
the associated
radius
of curvature
⇢(t) =
= 1/ are
are defined
defined
rby
(t) is not linearly independent of ṙ and r̈. In this case, we set b = t ^ n.
by
The local curvature (t) and the associated radius of curvature ⇢(t) = 1/ are defined
ṫ · n
by
(t) = ṫ · n ,
(2.45)
(t) = ||ṙ|| ,
(2.45)
dunkel@math.mit.edu
||
ṙ||
ṫ · n
curveLr(t)
, where
t 2 [0, T ]. The length of the curve is given
= 2 R dt
||ṙ(t)||
(2.41)
nuous curve0r(t) 2 R3 , where t 2 [0, T ]. The length of the curve is given
Z T
denotes the Euclidean
norm. The local unit tangent vector
Z
L=
dt ||ṙ(t)||
(2.41)
T
-2
0
L=
dt ||ṙ(t)||
(2.41)
0
d || · || denotes the
Euclidean
norm. The local unit tangent vector
ṙ
0
.
(2.42)
t
=
/dt and || · || denotes the Euclidean norm. The local unit tangent
vector
||ṙ||
ṙ
.
(2.42)
t=
2
it curvature vector,
is
ṙ
||ṙ||
.
(2.42)
t=
||ṙ||
r, or unit curvature
(I tt)vector,
· r̈ is
n =or unit curvature .vector, is
(2.43)
vector,
2
||(I (Itt) ·tt)
r̈||· r̈
n=
.
(2.43)
(I· r̈||tt) · r̈
||(I tt)
0
n = n̂(t) span the
. osculating (‘kissing’)
(2.43)
unit normal vector
plane
||(I tt) · r̈||
)vector
and unit
is normal
definedvector
by n̂(t) span the osculating (‘kissing’) plane
-2
normal
is defined
tor t̂(t)vector
and unit
normalby
vector n̂(t) span the osculating (‘kissing’)
plane
...
...
unit (I
binormal
vector
isnn)
defined
by
tt)
·
(I
·
r
r.
= b = (I tt) · (I nn)...· ...
(2.44)
.
(2.44)
...
||(I ||(I
tt) · (I
· r·||rnn)
(I· (Inn)
tt) nn)
· (I
tt)
|| · r
b=
(2.44)
... .
||(I tt) · (I nn) · r ||
{t(t),b(t)}
n(t), b(t)}
local
Frenetframe.
frame.
n(t),
spansspans
the the
local
Frenet
(t)
and
then(t),
associated
radius
of
curvature
⇢(t)
=
defined
basis
{t(t),
b(t)}
spans
local
Frenet
frame.
nd
the
associated
radius
ofthe
curvature
⇢(t)
=1/
1/areare
defined
vature (t) and the associated radius of curvature ⇢(t) = 1/ are defined
ṫ · n
2
0
-2
dunkel@math.mit.edu
Unit tangent vector t(t) and unit normal vector n(t) ...
span the osculating (‘kissing’) plane
(I tt) · (I nn) · r
at
point
t. The unit
binormal
is defined
by local
b n(t),
=vector
.
(2.44)
... Frenet
The
orthonormal
basis
{t(t),
b(t)}
spans
the
frame. For plane curves,
||(I
tt)
·
(I
nn)
·
r
||
...
...
r (t) is not linearly independent of(Iṙ and
case,
tt)r̈.· (IIn this
nn)
· r we set b = n ^ t.
band
=
.
(2.44)
...curvature
TheThe
orthonormal
basis (t)
{t(t),
n(t),
spans the local
Frenet
frame.
curves,
local curvature
theb(t)}
associated
⇢(t) =For
1/plane
are defined
||(I
tt) · (I radius
nn) ·ofr ||
...
r (t) is not linearly independent of ṙ and r̈. In this case, we set b = n ^ t.
by
local curvature
theb(t)}
associated
of curvature
⇢(t) =For
1/plane
are defined
TheThe
orthonormal
basis (t)
{t(t),and
n(t),
spans radius
the local
Frenet frame.
curves,
...
n this case, we set b = n ^ t.
rby(t) is not linearly independent of ṙ(t)
and=r̈.ṫ ·In
,
(2.45)
||
ṙ||
The local curvature (t) and the associated radius of curvature ⇢(t) = 1/ are defined
ṫ · n
by
(t)
=
,
(2.45)
and the local torsion ⌧ (t) by
||ṙ||
ṅṫ··bn
(2.45)
⌧(t)
(t) ==
.,
(2.46)
ṙ||
||||ṙ||
ṅ · b
(t) =⌧ = 0. .
(2.46)
For plane
curves
with ⌧constant
and
the local
torsion
(t) by b, we ⌧have
||ṙ||
Given ||ṙ||, (t), ⌧ (t) and the initial values {t(0), n(0), b(0)}, the Frenet frames along
ṅ=· 0.
b
For curve
plane can
curves
with constant
b, we⌧the
have
⌧
the
be obtained
by solving
Frenet-Serret
system
(t) =
.
(2.46)
||
ṙ||
0 values {t(0),
1 n(0),
0 1b(0)}, the Frenet frames along
Given ||ṙ||, (t), ⌧ (t) and0
the1initial
ṫ
0
0
t
the
curve
can
be
obtained
by
solving
the
Frenet-Serret
system
1
For plane curves with constant
have ⌧ =
0. ⌧ A @nA .
@ṅb,Awe
@
0
=
(2.47a)
0
1
0
1
0
1
ṙ|| the
Given ||ṙ||, (t), ⌧ (t)||and
ṫ initial 0values
0
⌧ {t(0),
00 n(0),
bt b(0)}, the Frenet frames along
ḃ
the curve can be obtained 1by @
solving
@ Frenet-Serret
ṅA = the
0 ⌧ A @system
nA .
(2.47a)
||
ṙ||
The above formulas simplify if0t ḃis1the arc
for
0 0length,
1in0this
1case ||ṙ|| = 1.
⌧
0
b
ṫ
0
0
t
1 @ A @
ṅis the
0 for
⌧ Ain@this
nA case
= arc length,
.
(2.47a)
The above formulas simplify
if
t
||
ṙ||
=
1.
42
||ṙ||
0
⌧ 0
b
ḃ
and the local torsion ⌧ (t) by
42
The above formulas simplify if t is the arc length,
for in this case ||ṙ|| = 1.
42
dunkel@math.mit.edu
the tension3 by , adopting the parameterization y = h(x) for the polymer and assuming
that the bending energy is negligible, the energy relative to the ground-state is given by
Z L
p
E=
dx 1 + h2x L ,
(2.48)
0
where hx = h0 (x). Restricting ourselves to small deformations, |hx | ⌧ 1, we may approximate
Z L
a simple example, consider
a
polymer
confined in a plane.(2.49)
Assume
E'
dx h2x .
2 0
2.3.2
Stretchable polymers: Minimal model and equipartition
As
the polymer’s endpoints are fixed at (x, y) = (0, 0) and (x, y) = (0, L), respectively, and that the groundTaking into account that h(0) = h(L) = 0, we may represent h(x) and its derivative
state
configuration corresponds to a straight line connecting these two points. Denoting
through the Fourier-sine series
the tension3 by , adopting the
y = h(x) for the polymer and assuming
✓
◆
1 parameterization
X
n⇡x
2.3.2
Stretchable
model
and
equipartition
=
An sin theMinimal
(2.50a)
that the bending
energyh(x)
ispolymers:
negligible,
energy
relative
to
the
ground-state
is given by
L
n=1
◆
n⇡Z L ✓ n⇡x
As a simple example, consider X
a1 polymer
confined
in a plane. Assume the polymer’s endp.
hx (x) =
An
cos
(2.50b)
2
L
L
points are fixed at (x, y) = E
(0,=
0)
and
(x,
y)
=
(0,
L),
respectively,
and that the grounddx 1 + hx L ,
(2.48)
n=1
0
state
configuration
Exploiting
orthogonalitycorresponds to a straight line connecting these two points. Denoting
3 0
✓ the◆ parameterization
✓
◆
Z L
the
tension
y = h(x) for the polymer and assuming
where
hx = hby
(x)., adopting
Restricting
n⇡x ourselves
m⇡x toLsmall deformations, |hx | ⌧ 1, we may approxidx sin
sin
=
(2.51)
nm
that
is negligible,
relative to the
ground-state is given by
L
Lthe energy
2
0
matethe bending energy
Z L Z L
we may rewrite the energy (2.49) as
p
Z
⌘ ✓1n⇡x
E = ⇣ n⇡E⌘ ⇣'m⇡dx
+ ◆hh2x2x .✓ m⇡x
L ◆,
(2.48)
XX L
dx
(2.49)
E '
dx An Am
cos
cos
2
0
0 L
2
L
L
L
0
n
m
⇣ n⇡ ⌘ ⇣ m⇡ ⌘ L
XX
0
where
h
=
h
(x).
Restricting
ourselves
to=small
deformations,
|hx | h(x)
⌧ 1, and
we may
=
An Am h(0)
Taking xinto account
that
=L h(L)
0, we
may represent
its
nm
2 n m
L
2
mate
through the Fourier-sine
series
1
X
=
Z
(2.52a)
✓
◆
n=1
2 n⇡x
E
'
dx
h
(2.49)
= 2 0 An sinx .
(2.50a)
where the energy En stored in Fourierh(x)
mode n is
L
✓ 2 2 ◆ n=1
n⇡
2
✓ represent
◆(2.52b) h(x) and its derivative
1
n = An = h(L).X
Taking into account that Eh(0)
= 0, n⇡
we may
4L
n⇡x
hx (x) =
An
cos
.
(2.50b)
throughcarries
theunits
Fourier-sine
series
of energy/length.
L
L
n=1
✓
◆
1
X
n⇡x
43
h(x) =
An sin
(2.50a)
Exploiting orthogonality
L
n=1
✓
◆
✓
◆
Z L
✓ L◆
1
n⇡xX
m⇡x
n⇡
n⇡x
dunkel@math.mit.edu
dx
sin
sin
(2.51)
hx (x) =L
An Lcos = 2 .nm
(2.50b)
0
3
En ,
approxiderivative
1 L
X
E=
=
E
E=
00
0
dx p11+
+hh2xx LL ,,
dx
dx 1 + h2x L ,
(2.48)
(2.48)
(2.48)
where hhxx =
= hh00(x).
(x). Restricting
Restricting ourselves
ourselves to
to small
small deformations,
deformations, |h
|hxx|| ⌧
⌧ 1,
1, we
we may
may approxiapproxiwhere
0
where hx = h (x). Restricting ourselves to small deformations, |hx | ⌧ 1, we may approximate
mate
mate
ZZ LL
E'
' Z Ldx
dxhh2x2x.2.
(2.49)
E
(2.49)
2
E '2 00 dx hx .
(2.49)
2 0
Taking into
into account
account that
that h(0)
h(0) =
= h(L)
h(L) =
= 0,
0, we
we may
may represent
represent h(x)
h(x) and
and its
its derivative
derivative
Taking
Taking the
into
account that
h(0) = h(L) = 0, we may represent h(x) and its derivative
through
the Fourier-sine
Fourier-sine
series
through
series
through the Fourier-sine series
✓
◆
✓
◆
1
1
X
X
n⇡x
n⇡x ◆
1 A sin ✓
h(x) =
= X
(2.50a)
h(x)
Annsin n⇡x
(2.50a)
L
L
h(x) = n=1
(2.50a)
n=1 An sin
L
✓
◆
✓
◆
1
1
n=1
X
X
n⇡
n⇡x
n⇡
n⇡x
1 A
(x) =
= X
cos ✓ n⇡x ◆..
(2.50b)
hhxx(x)
Ann n⇡cos
(2.50b)
L
L
L
L
hx (x) = n=1
cos
.
(2.50b)
n=1 An
L
L
n=1
Exploiting orthogonality
orthogonality
Exploiting
Exploiting orthogonality
✓
◆ ✓
✓
◆
✓
◆
◆
ZZ LL
n⇡x
m⇡x
n⇡x
m⇡x
LL
Z Ldx
dx sin
sin ✓ n⇡x ◆sin
sin ✓ m⇡x ◆=
= L nm
(2.51)
(2.51)
nm
L
L
2
sin L
=2 nm
(2.51)
00 dx sin L
L
L
2
0
we
may
rewrite
the
energy
(2.49) as
as
we may rewrite the energy (2.49)
we may rewrite the energy Z
(2.49)
✓
◆ ✓
✓
◆
Z LL as
✓
◆
◆
⌘
⇣
⌘
⇣⇣n⇡
⌘
⇣
⌘
X
X
XX Z
n⇡ m⇡
m⇡
n⇡x
m⇡x
n⇡x
m⇡x
E '
'
dxA
AnnA
Amm ⇣ n⇡ ⌘ ⇣ m⇡ ⌘cos
cos ✓ n⇡x ◆cos
cos ✓ m⇡x ◆
X X Ldx
E
LL
E ' 22 nn mm 00 dx An Am LL
cos LL
cos LL
2X
L
L
L
L
0
⇣⇣n⇡
X
X
n X
m
n⇡⌘⌘⇣⇣m⇡
m⇡⌘⌘ LL
=
AnnA
Amm ⇣ n⇡ ⌘ ⇣ m⇡ ⌘ L nm
X XA
=
nm
2
L
L
2
2
L
L
2
=
m An Am
nm
nn m
2
L
L
2
1
1 n
m
X
X
1E
= X
Enn,,
(2.52a)
=
(2.52a)
= n=1
(2.52a)
n=1 En ,
n=1
where the
the energy
energy E
Enn stored
stored in
in Fourier
Fourier mode
mode nn isis
where
where the energy En stored in Fourier mode
✓ n22 is22◆
◆
✓
nn ⇡⇡
Enn =
=A
A2n2n ✓ n2 ⇡ 2 ◆..
E
4L
En = A2n 4L
.
4L
3
3
carries units
units of
of energy/length.
energy/length.
carries
(2.52b)
(2.52b)
(2.52b)
dunkel@math.mit.edu
n
m
⇣ n⇡ ⌘ ⇣ m⇡
⌘ ✓ n⇡x ◆ ✓ m⇡x ◆
(2.48)
E ' =
dx An Am
cos
cos
0
E
,
n
2 n m 0
L
L
L
L
⌘ ⇣may
Xn=1
X|hx | ⌧ ⇣1,n⇡we
h0 (x). Restricting ourselves to small deformations,
m⇡ ⌘approxiL
=
An Am
nm
where the energy
2 n Enmstored in Fourier
L
Lmode
2 n is
E=
dx
E'
2
1+
Z
Z
1
X
L X
, X
h2x
L
dx h2x .
0
=
1
X
L
En ,
En =
n=1
3
A2n
✓
2 2
◆
n⇡
(2.49) .
4L
(2.5
carries
units
of energy/length.
where
thewe
energy
Enrepresent
stored
in Fourier
mode
is
o account that h(0) = h(L)
= 0,
may
h(x) and
itsn derivative
✓ 2distribution
◆
e Fourier-sine series
2
Now assume the polymer is coupled to a bath and the stationary
is canonical
n
⇡
2
43.
An
n = stationary
Now assume the 1
polymer is✓coupled
to
a bath andEthe
distribution
is canonical
◆
1
4L
X p({An })n⇡x
=
exp( E)
Z1
h(x) = 3 A
(2.50a)
n sinunits of energy/length.
✓
◆
carries
1
p({An })L = 1 exp(
E)
X
n2 ⇡ 2
Z
2
n=1
=
exp
(2.53)
◆
1 An ✓
✓
◆
2 2
X
1
Z
4L
⇡
X n⇡
n⇡x1 exp n=1 A2n n 43
=
(2.53)
hx (x) = 1 An
cos
.
(2.50b)
Z
4L
n=1
with = (kB T ) . The PDF
factorizes
and, therefore,
also the normalization constant
L
L
n=1
orthogonality
Z
E '
=
L
1 therefore, also the normalization constant
= (kB T ) 1 . The PDF factorizes and,
Y
Z = 1Zn ,
(2.54a)
Y
✓
◆
✓
◆
Z =i=1 Zn ,
(2.54a)
where
dx sin
n⇡x
L
m⇡x
sin
Z 1 L
L
i=1
=
nm
2 ✓ 2 2◆
(2.51)
✓
◆1/2
n
⇡
4⇡L
Zn = Z dAn exp A2n ✓
= ✓ 2 2 ◆1/2.
◆
1
2
2
4L
n
⇡
n⇡
4⇡L
energy (2.49) as Z = 1 dA exp
2
An
=
.
n
n
2
2
4L
n⇡
WeZthus find for the first
1 to moments of✓An
◆ ✓
◆
0
write the
with
where
XX
L
(2.5
⇣ n⇡ ⌘ ⇣ m⇡ ⌘
n⇡x
m⇡x
We thus
dxfind
Anfor
Amthe first to moments
cosnof] A=n 0 cos
E[A
2 n m 0
L
L
L 2k T L L
2
E[Ann] ] == 0 B
E[A
,
⇣
⌘
⇣
⌘
XX
2
2
n ⇡T L
n⇡
m⇡ L
2k
B
2
An Am
nm E[An ] =
,
2 n mand from this L
L energy
2
for the mean
per mode
n2 ⇡ 2
✓
◆
2
1
and from this for the mean energy per2 mode
(2.54b)
(2.54b)
(2.55a)
(2.55a)
(2.55b)
(2.55b)
dunkel@math.mit.edu
n
m
⇣ n⇡ ⌘ ⇣ m⇡
⌘ ✓ n⇡x ◆ ✓ m⇡x ◆
(2.48)
E ' =
dx An Am
cos
cos
0
E
,
n
2 n m 0
L
L
L
L
n=1
⇣1,n⇡
⌘ ⇣may
X
h0 (x). Restricting
ourselves
to
small
deformations,
|hand
we
approxim⇡ ⌘distribution
L
x| ⌧
Now assume the polymer is coupled to a X
bath
the
stationary
is canonical
=
An Am
nm
where the energy
2 1n Enmstored in Fourier
L
Lmode
2 n is
E=
dx
1+
h2x
Z
1
X
L X
, X
p({An }) =1
L
exp( E)
✓ 2 2◆
Z
X
n⇡
✓ 2 2◆ 2
1
2 =
X
E'
dx hx .
1En ,
⇡ An (2.49) .
n =
2 En
=n=1 exp
An
(2.53)
4L
2 0
Z
4L
n=1
3
carries
units
of energy/length.
where
thewe
energy
Enrepresent
stored
in Fourier
mode
n derivative
is
o account that with
h(0) =
h(L)
may
h(x)
and
its
1= 0,
= (k
T
)
.
The
PDF
factorizes
and,
therefore,
also
the
normalization
constant
B
✓ 2distribution
◆
e Fourier-sine series
2
Now assume the polymer is coupled to a bath
and the stationary
is canonical
1
n
⇡
2
Y
43.
E = An
✓
◆
Z=
Zn , n
(2.54a)
1
1
4L
X p({An })n⇡x
=
exp(
E)
i=1
Z
h(x) = 3 A
(2.50a)
n sinunits of energy/length.
✓
◆
carries
1
L 1
X
where
n2 ⇡ 2
2
n=1
=
exp
(2.53)
✓
◆
✓ 2 2 ◆ An ✓ 4L
◆1/2
Z
1
Z
1
X n⇡
n ⇡n=1
4⇡L
n⇡x
43
2
An .
=
.
(2.54b)
n exp
hx (x) = Z1n =An dAcos
(2.50b)
2⇡2
4L
n
with = (kB T ) . The1PDF
L factorizes
L and, therefore, also the normalization constant
n=1
We thus find for the first to moments of A
1
n
Y
orthogonality
Z=
Z ,
(2.54a)
E[An ] = n0
(2.55a)
i=1
✓
◆
✓
◆
Z L
2kB T L
2
n⇡x
m⇡x
L
E[A
]
=
,
(2.55b)
where
dx sin
sin
= n nm
(2.51)
n2 ⇡ 2
2 ✓ 2 2◆
✓
◆1/2
Z 1 L
L
0
n
⇡
4⇡L
2
and from this for
perAmode
Zn the
= mean
dAenergy
=
.
(2.54b)
n exp
n
2
2
n⇡
✓ 2 2 ◆4L
1
write the energy (2.49) as
n⇡
1
E[A2n ] = kB T.
(2.56)
n] =
WeZthus find for the first toE[E
moments
of
A
n
✓
◆
✓
◆
4L
2
⇣ ⌘⇣
⌘
XX L
Z
L
(2.5
(2.5
n⇡
m⇡
n⇡x
m⇡x
E '
Anmode
Am absorbs the same
cos
cos energy, which is just a manifestion
E[A
0 thermal
(2.55a)
That is,dx
each
amount
n ] = of
2 n mof the
L
L
L 2k Tdegrees
L of freedom.
0 canonical equipartion
theorem for
B L
2 harmonic
E[An ] =
,
(2.55b)
⇣ m⇡
⌘L
X X We may⇣ n⇡
2
2
use⌘the
equipartition
result to compute
the
variance
of
the
polymer
at the
n⇡
=
An Amx 2 [0, L]
nm
position
2 n mand from this L
L energy
2
for the mean
per mode
✓
◆ ✓
◆
dunkel@math.mit.edu
1✓ X
1
◆
X
n⇡x
m⇡x
1
2
2 2
n
✓ 22 2 ◆ 2kB T L
1,
E[Ann ]⇡ =
(2.55b)
E[En ] =
E[An2n ]2 ⇡=2 kB T.
(2.56)
4L
2
and from this for the mean energy per mode
That is, each mode absorbs the same
of thermal energy, which is just a manifestion
✓ amount
◆
2
n2 ⇡harmonic
1
of the canonical equipartion theorem for
degrees
of freedom.
E[En ] =
E[A2n ] = kB T.
(2.56)
We may use the equipartition result
to
compute
the
variance
of
the
polymer
at
the
4L
2
position x 2 [0, L]
That is, each mode absorbs the same amount of thermal energy, which is just a manifestion
✓
◆ ✓
◆
1 X
1
X
of the canonical equipartion
theorem
for
harmonic
degrees
of
freedom.
n⇡x
m⇡x
2
Am ] sin the variance
E[h(x)
] :=
sin
We may use the
equipartition
resultE[A
to ncompute
of the polymer at the
L
L
n=1 m=1
position x 2 [0, L]
✓
◆ ✓
◆
1 X
1
X
n⇡x◆ ✓ m⇡x◆
✓
1 X
1 E[A2 ]
= X
sin
sin m⇡x
n nm
n⇡x
L sin
L
E[h(x)2 ] := n=1 m=1 E[An Am ] sin
L
L
✓
◆X
1
2
n=1
m=1
sin n⇡x/L
2kB1T L
✓
◆. ✓
◆
1
= X X2
(2.57)
m⇡x
2n⇡x
2
⇡
n
=
E[An=1
sin
n ] nm sin
L
L
n=1 m=1
If we additionally average along ✓
x
◆X
1
2
sin
n⇡x/L
2k
T
L
B
✓
◆
✓
◆ 2.
1
=k TL X
(2.57)
2
2
1
k
T
L
⇡
k
T
L
B
B
B
⇡
n
n=1
hE[h(x)2 ]i =
=
=
.
(2.58)
2
2
⇡2
n
⇡
6
6
n=1
If we additionally average along x
Thus, by measuring fluctuations
the polymer
✓ along
◆X
✓ we may
◆ 2infer .
1
kB T L
1
kB T L ⇡
kB T L
2
hE[h(x) ]i =
=
=
.
(2.58)
2
2
⇡2
n
⇡
6
6
n=1 44
Thus, by measuring fluctuations along the polymer we may infer .
44
dunkel@math.mit.edu
2.3.3
Rigid polymers: Euler-Bernoulli equation
2.3.3 Rigid
polymers:
Euler-Bernoulli
equationto the (x, y)-plane, with one
Consider
a rigid
polymer whose
motion is confined
atConsider
(x, y)a=rigid
(0,polymer
0) andwhose
the motion
other ismoving
before,
the parame
confined freely.
to the (x,As
y)-plane,
withwe
one adopt
end fixed
2.3.3
polymers:
Euler-Bernoulli
equation
at
(x,and
y) =Rigid
(0,
0) and
the other
freely.
As before,
we adopt the
h(x)
assume
that
themoving
energy
is can
be expressed
in parameterization
terms of fundamental
h(x)
and assume
that thewhose
energymotion
is can isbeconfined
expressed
terms
of fundamental
geometric
Consider
a rigid
polymer
to in
the
(x, y)-plane,
with one
end fixed
properties.
At
zero-temperature
and
in
the
absence
of
other
forces,
the groundst
properties.
At
zero-temperature
and
in
the
absence
of
other
forces,
the
groundstate
of
the
at (x, y) = (0, 0) and the other moving freely. As before, we adopt the parameterization
polymer
isa straight
a straight
along
positive
the
polymer
positivethe
the
h0 (x)x-axis,
= 0, xgeometric
2 i.e.,
[0, L].h0 (x) = 0,
h(x) andisassume
thatconfiguration
the configuration
energy isalong
can the
be expressed
in x-axis,
terms
ofi.e.,
fundamental
Since one
of the
can
freely,move
is negligible,
andisthenegligible,
main
Since
one
end
of polymer
the polymer
can
tension
and
properties.
Atend
zero-temperature
and
in move
the absence
oftension
otherfreely,
forces,
the
groundstate
of
the
contribution
the polymers
energyalong
comesthe
from
curvature
,
polymer is a to
straight
configuration
positive
the
x-axis,
i.e., h0 (x) =
contribution
to
the
polymers
energy
comes
from
curvature
,0, x 2 [0, L].
Z
Since one end of the polymer can move
freely, tension is negligible, and the main
A L
2
contribution to the polymers energy
comes from
E'
dx curvature
, Z L ,
(2.59)
A
2 0
2
ZE
dx
,
L '
A
E ' energy⇥length).
dx 22, 0 For plane curves h(x), the curva(2.59)
where A is the bending modulus (units
2 0
ture can be expressed as
where
Aisisthethe
bending
modulus
(units energy⇥length).
For
plane
curves h(x), t
where A
bending
modulus
(units energy⇥length).
For
plane
curves
h(x),
the
curvahxx
=
.
(2.60)
ture
beexpressed
expressed
ture can
can be
as as
(1 + h2x )3/2
hxx
hxxmay approximate ' hxx(2.60)
Focussing on the limit of weak deformations,
hx3/2
⌧. 1, we
, and
=
2
(1 +
hx=
)
.
the energy simplifies to
(1 + h2x )3/2
Z L hx ⌧ 1, we may approximate ' hxx , and
Focussing on the limit of weak deformations,
A
the
energy
simplifies
to
E
'
dx (hxx )2 .
(2.61)
Focussing on the limit of weak2 deformations,
hx ⌧ 1, we may approximate
'
0
Z L
the energy simplifies to
A
2
The exact form of the boundary conditions
depend
the
E'
dx (hxx )on
. how the polymer is attached to
(2.61)
2
Z L at an angle 90 , the boundary
plane x = 0. Assuming that polymer is 0rigidly anchored
A
conditions
at
the
fixed
end
at
x
=
0
are
The exact form of the boundary conditions
on how
thexx
polymer
E depend
'
dx (h
)2 . is attached to the
plane x = 0. Assuming that polymer is rigidly2anchored
at an angle 90 , the boundary
0
h(0) = 0 ,
hx (0) = 0.
(2.62a)
conditions at the fixed end at x = 0 are
dunkel@math.mit.edu
The exact form of the boundary conditions depend on how the polymer is attach
contribution to the polymers energy comes from curvature ,
Z
A L
E'
dx 2 ,
2 0
Boundary conditions
(2.59)
where A is the bending modulus (units energy⇥length). For plane curves h(x), the curvature can be expressed as
hxx
=
.
2
3/2
(1 + hx )
(2.60)
Focussing on the limit of weak deformations, hx ⌧ 1, we may approximate ' hxx , and
the energy simplifies to
Z L
A
E'
dx (hxx )2 .
(2.61)
2 0
The exact form of the boundary conditions depend on how the polymer is attached to the
plane x = 0. Assuming that polymer is rigidly anchored at an angle 90 , the boundary
conditions at the fixed end at x = 0 are
h(0) = 0 ,
hx (0) = 0.
(2.62a)
At the free end, we will consider flux conditions
hxx (L) = 0 ,
hxxx (L) = 0.
(2.62b)
Intuitively, because of = hxx , these last two conditions mean that the polymer tries to
(minimal absolute curvature at the free end)
maintain minimal absolute curvature at the free end. By means of the BCs (2.62) and two
partial integrations, we may rewrite (2.61) as
#
"
L Z L
A
dunkel@math.mit.edu
E '
hx hxx
dx hx hxxx
x
contribution to the polymers energy comes from curvature ,
Focussing on the limit of weak deformations, hx ⌧ 1, we may approximate ' hxx , and
Z L
the energy simplifies to
A
2
E'
dx
,
(2.59)
Z
L
2A 0
Boundary conditions
E'
dx (hxx )2 .
(2.61)
2
0
where A is the bending modulus (units energy⇥length).
For plane curves h(x), the curva-
ture can
expressed
Thebeexact
form ofasthe boundary conditions depend on how the polymer is attached to the
plane x = 0. Assuming that polymer is rigidly anchored at an angle 90 , the boundary
h
conditions at the fixed end at x==0 are xx
.
(2.60)
(1 + h2x )3/2
h(0) = 0 ,
hx (0) = 0.
(2.62a)
Focussing on the limit of weak deformations, hx ⌧ 1, we may approximate ' hxx , and
At thesimplifies
free end, to
we will consider flux conditions
the energy
Z
hxx (L)A= 0L,
hxxx2(L) = 0.
(2.62b)
E'
dx (hxx ) .
(2.61)
2
Intuitively, because of = h , these 0last two conditions mean that the polymer tries to
xx
maintain
absolute curvature
at the
free end.
By means
of the BCs
(2.62) and
The exact
formminimal
of the boundary
conditions
depend
on how
the polymer
is attached
to two
the
partial
we may
rewriteis(2.61)
as anchored at an angle 90 , the boundary
By x
plane
= 0. integrations,
Assuming that
polymer
rigidly
#
conditions at the fixed end at"x = 0 LareZ L
A
hx hxx
dx hx hxxx
2 h(0) =0 0 , 0
hx (0) = 0.
Z L
A
=
hx hxxx
At the free end, we will consider
fluxdxconditions
2
" 0
#
Z L
L Z L
Ahxx (L) = 0 ,
h (L) = 0. A
=
hhxxx +
dxxxx
hhxxxx =
dx hhxxxx .
2
2 0
0
0
E '
(2.62a)
(2.62b)
(2.63)
Intuitively, because of = hxx , these last two conditions mean that the polymer tries to
maintain minimal absolute curvature at the free45end. By means of the BCs (2.62) and two
partial integrations, we may rewrite (2.61) as
#
"
L Z L
dunkel@math.mit.edu
A
E '
h h
dx h h
IfIf the
solvent, an
an initial
initial perturbation
perturbationh(0,
h(0,x)
x)will
will
the polymer
polymer isis surrounded
surrounded by
by aa viscous
viscous solvent,
If the
polymer
is surrounded
by a viscous
solvent,due
an initial
perturbation
h(0,relaxation
x) will
relax
to
Neglecting
fluctuations
due
to thermal
thermal
noise, the
the
relaxation
relax
to the
the ground-state.
ground-state.
Neglecting
fluctuations
to
noise,
relax
to the
ground-state.
Neglecting
fluctuations
dynamics
h(t,
x)
form44 due to thermal noise, the relaxation
dynamics
h(t,
x) will
will be
be of
of the
the over-damped
over-damped
form
dynamics h(t, x) will be of the over-damped form4
E
(2.64)
⌘htt = E ,
(2.64)
h,
(2.64)
⌘ht =
h
where
variational derivative
derivative isis defined
defined by
by
where⌘⌘ isis aa damping
damping constant,
constant, and the variational
where ⌘ is a damping constant, and the variational derivative is defined by
E[h(x)]
E[h(x) + ✏ (x y)]
y)] E[h(x)]
E[h(x)]
E[h(x)]
(2.65)
E[h(x)] :=
:= limE[h(x) + ✏ (x y)] E[h(x)] ..
(2.65)
✏!0
✏!0
.
(2.65)
h(y)
h(y) := lim
✏✏
✏!0
h(y)
✏
Keeping terms
terms up
up to
to order
order ✏,
✏, we find for the energy
Keeping
energy functional
functional (2.61)
(2.61)
Keeping terms up to order ✏, we find for the energy functional (2.61)
Z
AZ L LL
22
E[h(x)+
+✏✏ (x
(x y)]
y)] E[h(x)] = A
dx
[(h
+
✏✏ ))xx
(h
+
✏
)
(h
)
]]
E[h(x)
dx
[(h
+
(h
+
✏
)
(h
)
xx
xx
2
xx + ✏ )
xx (h )xx
E[h(x) + ✏ (x y)] E[h(x)] =
dx
[(h
+
✏
)
(h
]
2
xx
xx
xx
2 0Z00L
AZ L L
22
A
dx
[2✏h
+
O(✏
2 )]
=
dx
[2✏h
+
O(✏
)]
xx
xx
xx
xx
=
2 00 dx [2✏hxx xx + O(✏ )]
2 0
Usingthe
theintegral
integralidentity
identity
Using
the
integral
identity
Using
n
n
nn
g(x)
@
(x
y)
=
(
1)
y)
g(x)
nn
n n (x
n@
g(x)
@
(x
y)
=
(
1)
(x
y)
@
x
x
g(x) @x x (x y) = ( 1) (x y) @x g(x)
x g(x)
forany
anysmooth
smoothfunction
functiong,g,
g,one
oneobtains
obtains
for
any
smooth
function
one
obtains
Z L
Z
Z
LL
E[h(x)]
E[h(x)]
E[h(x)]
=AA
A dx
dxh h
hxxxx
(x)
Ah
(y),
xxxx
dx
(x)(x(x
(x y)y)
y)
=
Ah
(y),
==
(x)
==
Ah
(y),
xxxx
xxxx
xxxx
xxxx
h(y)
0
h(y)
h(y)
00
thatEq.
Eq.(2.64)
(2.64)becomes
becomesaaalinear
linearfourth-order
fourth-orderequation
equation
sosothat
that
Eq.
(2.64)
becomes
linear
fourth-order
equation
h =
↵h
,
A
↵ =A A.
(2.66)
(2.66)
(2.66)
(2.67)
(2.67)
(2.67)
dunkel@math.mit.edu
(2.68)
✏!0
h(y)
E[h(x)]
E[h(x) + ✏ (x ✏ y)] E[h(x)]
:= lim
.
✏!0
h(y) ✏, we find for the energy
✏ functional (2.61)
Keeping terms up to order
(2.65)
Z L functional (2.61)
Keeping terms up to order ✏, we find for the
A energy
E[h(x) + ✏ (x y)] E[h(x)] =
dx [(h + ✏ )xx (h + ✏ )xx (hxx )2 ]
Z
2 0L
A
If the
polymer
by a viscous
L dx [(h an
E[h(x)
+ ✏ is
(xsurrounded
y)] E[h(x)]
= A Z solvent,
+ ✏initial
)xx (h perturbation
+ ✏ )xx (hxxh(0,
)2 ] x) will
2 0 dx [2✏h
+ O(✏2 )]noise, the relaxation
relax to the ground-state. Neglecting =fluctuations
due xxto xxthermal
Z
2 0L4
A
dynamics h(t, x) will be of the over-damped
formdx [2✏h
2
=
xx xx + O(✏ )]
2 0
Using the integral identity
E
,
(2.64)
⌘h
=
t
Using the integral identity n
nh
n
g(x) @ (x y) = ( 1) (x y) @ g(x)
(2.66)
x
constant,
and
g(x) @xn (x
x
derivative
y) @xn g(x)is
where ⌘ is a damping
the=variational
defined by
y)
( 1)n (x
(2.66)
for any smooth function g, one obtains
E[h(x)]
E[h(x) + ✏ (x y)] E[h(x)]
Zobtains
for any smooth function
g, one
L
:=
lim
.
(2.65)
E[h(x)]
h(y)= A Z✏!0dx hxxxx (x) (x ✏ y) = Ahxxxx (y),
(2.67)
L
h(y)
E[h(x)]
0
=
A
dxfor
hxxxx
(x functional
y) = Ahxxxx
(y),
(2.67)
Keeping terms up toh(y)
order ✏, we find
the(x)
energy
(2.61)
0 fourth-order equation
so that Eq. (2.64) becomes a linear
Z L
A
so that E[h(x)
Eq. (2.64)
fourth-order
equation
+ ✏ becomes
(x y)] a linear
E[h(x)]
=
dx [(h
A + ✏ )xx (h + ✏ )xx (hxx )2 ]
ht = ↵hxxxx ,2 0 ↵ = .
(2.68)
⌘
Z L
A
ht = ↵hxxxx A
,
↵= .
(2.68)
=
dx [2✏h
⌘ xx xx + O(✏2 )]
Inserting the ansatz
2 0
Inserting the ansatz
1 t/⌧
Using the integral identity
h = e t/⌧ (x) ,
ht =
e
,
hxxxx = e t/⌧ xxxx ,
(2.69)
⌧1
n ,
n = e t/⌧ xxxx ,
h = e t/⌧ g(x)
(x) ,@ n (xht =y) = e( t/⌧
hxxxx
(2.69)
1)
(x
y)
@
(2.66)
x
x g(x)
⌧
gives the eigenvalue problem
gives
the
eigenvalue
problem
for
any
smooth
function
g, one obtains
1
(2.70)
Z L ⌧ 1↵ = xxxx .
E[h(x)]
= (x)
. y) = Ahxxxx (y),
(2.70)
xxxx
=A
dx
h
(x
(2.67)
xxxx
⌧↵
2
2
h(y)
0 operator (@x ) , which has the general solution
for the one-dimensional biharmonic
for the one-dimensional biharmonic operator (@x2 )2 , which has the general solution
so that Eq. (x)
(2.64)
a linear fourth-order equation
= Bbecomes
(2.71a)
1 cosh(x/ ) + B2 sinh(x/ ) + B3 cos(x/ ) + B4 sin(x/ )
(x) = B1 cosh(x/ ) + B2 sinh(x/ ) + B3 cos(x/
(2.71a)
4 sin(x/ ) dunkel@math.mit.edu
4
A µh)tt+onBthe
If inertia is important then onehwould
need
to
term
of
the
form
lhs.
of
Eq.
(2.64).
= ↵h
,
↵= .
(2.68)
ht =
↵hxxxx ,
↵=
⌘
.
(2.68)
Inserting the ansatz
h = e t/⌧
(x) ,
ht =
Eigenvalue
problem
1
e
⌧
t/⌧
,
hxxxx = e
t/⌧
xxxx ,
(2.69)
gives the eigenvalue problem
1
=
⌧↵
xxxx .
(2.70)
for the one-dimensional biharmonic operator (@x2 )2 , which has the general solution
(x) = B1 cosh(x/ ) + B2 sinh(x/ ) + B3 cos(x/ ) + B4 sin(x/ )
4
(2.71a)
If inertia is important then one would need to term of the form µhtt on the lhs. of Eq. (2.64).
where
= (↵⌧46)1/4 .
(2.71b)
From the boundary conditions (2.62), we have
0
0
0
0
=
=
=
=
B1 + B3
B2 + B4
B1 cosh(L/ ) + B2 sinh(L/ ) B3 cos(L/ )
B1 sinh(L/ ) + B2 cosh(L/ ) + B3 sin(L/ )
B4 sin(L/ )
B4 cos(L/ )
Inserting the first two conditions into the last two, we obtain the linear system
0 = B1 [cosh(L/ ) + cos(L/ )] + B2 [sinh(L/ ) + sin(L/ )]
0 = B1 [sinh(L/ ) sin(L/ )] + B2 [cosh(L/ ) + cos(L/ )].
For nontrivial solutions to exist, we must have
✓
[cosh(L/ ) + cos(L/ )]
(2.73a)
(2.73b)
◆
dunkel@math.mit.edu
[sinh(L/ ) + sin(L/ )]
0 = B1 cosh(L/ ) + B2 sinh(L/ )
0 = B1 + B3
0 0= =B1B+1 B
+3 B3
0 = Bconditions
From the boundary
(2.62), we have 0 = B1 sinh(L/ ) + B2 cosh(L/ ) +
2 + B4
0 0= =B2B+2 B
+4 B4
0 = B1 cosh(L/ ) + B2 sinh(L/ ) B3 cos(L/ ) B4 sin(L/ )
+
B3
000===BB11Bcosh(L/
) + )B+
) B)3 cos(L/
) B4) sin(L/
)
2 sinh(L/
B
sinh(L/
B
cos(L/
B
sin(L/
) last two
1 cosh(L/
2
3
4
two
the
0 = B1 sinh(L/ ) +Inserting
B2 cosh(L/the
) + first
B3 sin(L/
)conditions
B4 cos(L/ into
)
+ sinh(L/
B4
000===BB12Bsinh(L/
) + )B+
) + B)3+
sin(L/
) B4) cos(L/
)
2 cosh(L/
B2 cosh(L/
B3 sin(L/
B4 cos(L/
)
1
= two
B1 conditions
cosh(L/ ) +
B2 the
sinh(L/
) 0Bwe
cos(L/
)theBlinear
) cos(L/ )] + B
Inserting the 0first
into
last two,
obtain
system
3=
4 sin(L/
B
[cosh(L/
)
+
1 the linear system
Inserting the first two conditions into the last two, we obtain
Inserting the
first
two
conditions
into
the
last
two,
we
the linear
0 = B1 sinh(L/ ) + B2 cosh(L/ ) + B3 sin(L/ obtain
) B4 cos(L/
) system
0 = B1 [cosh(L/ ) + cos(L/ )] + B02 [sinh(L/
) [sinh(L/
+ sin(L/ )] )
(2.73a)
=
B
sin(L/
)] + B2
1
0 = B1 [cosh(L/ ) + cos(L/ )] + B2 [sinh(L/ ) + sin(L/ )]
(2.73a)
)sin(L/
+the
cos(L/
)]2+
B2obtain
[sinh(L/
) + sin(L/
)] (2.73b) (2.73
Inserting the
conditions
last
we
thecos(L/
linear
system
0 0first
= =two
B1B
[sinh(L/
) into
)] +two,
B
[cosh(L/
)+
)].
1 [cosh(L/
0 = B1 [sinh(L/ ) sin(L/ )] + B2 [cosh(L/ ) + cos(L/ )].
(2.73b)
For
nontrivial
solutions
to
exist,
we
must
have
0 == B1B[cosh(L/
)cos(L/
sin(L/
)]
+
B
[cosh(L/
)
+
cos(L/
)].
(2.73
1 [sinh(L/
2
0
)
+
)]
+
B
[sinh(L/
)
+
sin(L/
)]
(2.73a)
For nontrivial solutions to exist, we must have 2
For nontrivial solutions✓to exist, we must have
✓
◆
0
=
B
[sinh(L/
)
sin(L/
)]
+
B
[cosh(L/
)
+
cos(L/
)].
(2.73b)
1
2
For nontrivial solutions
to
exist,
we
must
have
[cosh(L/
)
+
cos(L/ )]
✓[cosh(L/ ) + cos(L/ )]
◆
[sinh(L/ ) + sin(L/ )]
= det) + sin(L/ )]
0 = det [cosh(L/
(2.74)
) + cos(L/ )] 0 [sinh(L/
✓
◆
[sinh(L/
)
sin(L/
)]
[cosh(L/
)
+
cos(L/
)]
For nontrivial
we must have
0 solutions
= det to exist,
(2.74) )]
[sinh(L/
) )] sin(L/
[cosh(L/
)sin(L/
+ cos(L/
)][cosh(L/
[sinh(L/
) + sin(L/
[sinh(L/
)
)]
)
+
cos(L/
)]
✓
◆
0 = det
(2.7
[sinh(L/
sin(L/
[cosh(L/
) + cos(L/
)]
[cosh(L/
) + )cos(L/
)] )][sinh(L/
) + sin(L/
)]
which gives us the eigenvalue
condition
0
=
det
(2.74)
which
gives
us
the
eigenvalue
condition
which gives us the eigenvalue
condition
[sinh(L/ ) sin(L/ )]
[cosh(L/ ) + cos(L/ )]
which gives us the eigenvalue
condition) cos(L/ ) + 1.
0 = cosh(L/
(2.75)
0
=
cosh(L/
)
cos(L/
)
+
1.
which gives us the eigenvalue condition
0 = cosh(L/(2.75)
) cos(L/
This equation has solutions for discrete
values) cos(L/
computed numerically, (2.7
0 = cosh(L/
) +can
1. be
n > 0 that
This equation has solutions for
discrete
values
>
0
that
can
be
computed numerically,
n ) + 1.
0
=
cosh(L/
)
cos(L/
(2.75)
and one finds for the first few eigenvalues
This
equation
has
solutions
for
discrete
values n
and
one
finds
for
the
first
few
eigenvalues
This equation has solutions for discrete values n > 0 that can be computed numericall
This equation has solutions
values
0 that
can
be computed
numerically,
L for discrete
n >for
and
one
finds
the
first
few
eigenvalues
L
and
one finds
findsfor
forthe
thefirst
first
few
eigenvalues
=
{0.94,
2.35, 3.93, 5.50, . . .} .
(2.76)
and one
few
eigenvalues
=
{0.94,
2.35,
3.93,
5.50,
.
.
.}
.
(2.76)
2 n
2 n
L
L
L
For comparison, for purely sinusoidal
excitations
of a 5.50,
harmonic
string =
one{0.94,
would (2.76)
expect3.93,
2.35,
=
{0.94,
2.35,
3.93,
.
.
.}
.
(2.7
=
{0.94,
2.35,
3.93,
5.50,
.
.
.}
.
For comparison, for purely2 sinusoidal
excitations
of
a
harmonic
string
one
would
expect
2 n
2 nas
n
that L/ n / n. The full time-dependent
solution can thus be written
that L/ n / n. The full time-dependent solution can thus be written as
⇢ sinusoidal
For comparison,
sinusoidal
excitations
of a harmonic
string
one
would
1for
For
comparison,
forpurely
purely
excitations
of
a purely
harmonic
string
oneexpect
would expe
X
For
comparison,
for
sinusoidal
excitations
⇢
1
t/⌧n
X
that
L/
/
n.
The
full
time-dependent
cann )thus
be
written
as
h(t,
x)
=
B1n
efull
cosh(x/ n )solution
cos(x/
+
n
that
L/
/
n.
The
time-dependent
solution
can
thus
be
written
as
t/⌧n
n
that
/
n.
full
time-dependent
solution
h(t, x) =
B1n e
cosh(x/
) cos(x/
+
nL/
n )The
n
n=1
⇢
1
⇢
X
1
n=1
X
t/⌧n cos(L/
⇢
cosh(L/
n )n+
n))1
h(t, x) =
B1n e
cosh(x/
)
cos(x/
+
t/⌧n
n
X
dunkel@math.mit.edu
h(t, x) =
B1n e cos(L/
cosh(x/
cos(x/
n ) + cosh(L/
n ) [sin(x/
n )] , (2.77)
n)
n ) + n ) t/⌧sinh(x/
n
n=1
[sin(x/
)
sinh(x/
sin(L/ n ) + sinh(L/ n )
n
n )] , (2.77)
and one
for for
thethe
firstfirst
fewfew
eigenvalues
and finds
one finds
eigenvalues
L
= {0.94,L 2.35,
3.93, 5.50, . . .} .
L
2 n
{0.94,2.35,
2.35,3.93,
3.93, 5.50,
5.50, . . .} .
==
{0.94,
2 n2
(2.76)
(2.76)
(2.76)
n
mparison, for
purely
sinusoidal
excitations
of a harmonic
string one
would
expect
For
comparison,
for
purely
sinusoidal
excitations
of
a
harmonic
string
one
would
For comparison, for purely sinusoidal excitations of a harmonic string one wouldexpect
expect
n. The
time-dependent
solution can
thus can
be
written
as
that
L/
/
n.
The
full
time-dependent
solution
can
thus
be
written
asas
n / that
n
L/ full
/
n.
The
full
time-dependent
solution
thus
be
written
n
⇢
⇢X
1
1
⇢
1
X
X
t/⌧n
t/⌧=
n
h(t,
x)
B
e
cosh(x/
t/⌧
1n
n ) ) cos(x/
n) +
x) = h(t,Bx)1n e=
cosh(x/
cos(x/
+
n
B1n e n n )cosh(x/
)
cos(x/
n
n) +
n=1
n=1
n=1
cos(L/ n ) + cosh(L/ n )
sinh(x/ n )] , (2.77)
cosh(L/
cos(L/ n ) cos(L/
+ sin(L/
cosh(L/
)
n) + n
n ) [sin(x/ n )
sinh(x/
)] , (2.77)
n ) + sinh(L/
[sin(x/n ) n[sin(x/
) sinh(x/
n)
n )] , n(2.77)
sin(L/
4
n)
sin(L/
n ) + nsinh(L/
n)
+
sinh(L/
)
where ⌧n = 4n /↵ = n ⌘/A, and the coefficients B1n are determined by the initial condition.
4
4
4where ⌧nTo
4= obtain
/↵
=
⌘/A,
and
the
coefficients
Bmode,
determined
bythe
thequasi-stationary
initial condition.
1n arelet
an
estimate
for
the
energy
per
us
consider
n
n
=
/↵
=
⌘/A,
and
the
coefficients
B
are
determined
by
the
initial
condition.
n
1n
n
n
To
obtain
an
estimate
for
the
energy
per
mode,
letcase,
us consider
themode-expansion
quasi-stationary
limit,
which
can
be
formally
defined
by
⌘
!
1.
In
this
we
have
the
btain an estimate for the energy per mode, let us consider the quasi-stationary
limit, which can be formally
defined by ⌘ ! 1. In this case, we have the mode-expansion
⇢
1
X
hich can be formally defined by ⌘ ! 1. In this case, we have the mode-expansion
h(x) =
B⇢
cos(x/ n ) +
1
1n cosh(x/ n )
X
⇢
1
n=1
X
h(x) =
B1n cosh(x/ n ) cos(x/ n ) +
h(x) =
B1n cosh(x/
cos(x/n ) +
+
n)
n ) cos(L/
n )cosh(L/
n=1
[sin(x/ n )
n=1
sin(L/n )n+
) +cosh(L/
sinh(L/ nn))
cos(L/
[sin(x/
cos(L/ n ) +
cosh(L/
)
sin(L/ n ) + nsinh(L/
47 n )
sin(L/
n)
+ sinh(L/
n)
[sin(x/
n)
n)
sinh(x/
n )]
sinh(x/
sinh(x/
n )]
.
n )]
.
(2.78)
.
(2.78)
(2.78)
47
47
dunkel@math.mit.edu
and one
for for
thethe
firstfirst
fewfew
eigenvalues
and finds
one finds
eigenvalues
L
= {0.94,L 2.35,
3.93, 5.50, . . .} .
L
2 n
{0.94,2.35,
2.35,3.93,
3.93, 5.50,
5.50, . . .} .
==
{0.94,
2 n2
(2.76)
(2.76)
(2.76)
n
mparison, for
purely
sinusoidal
excitations
of a harmonic
string one
would
expect
For
comparison,
for
purely
sinusoidal
excitations
of
a
harmonic
string
one
would
For comparison, for purely sinusoidal excitations of a harmonic string one wouldexpect
expect
n. The
time-dependent
solution can
thus can
be
written
as
that
L/
/
n.
The
full
time-dependent
solution
can
thus
be
written
asas
n / that
n
L/ full
/
n.
The
full
time-dependent
solution
thus
be
written
n
⇢
⇢X
1
1
⇢
1
X
X
t/⌧n
t/⌧=
n
h(t,
x)
B
e
cosh(x/
t/⌧
1n
n ) ) cos(x/
n) +
x) = h(t,Bx)1n e=
cosh(x/
cos(x/
+
n
B1n e n n )cosh(x/
)
cos(x/
n
n) +
n=1
n=1
n=1
cos(L/ n ) + cosh(L/ n )
sinh(x/ n )] , (2.77)
cosh(L/
cos(L/ n ) cos(L/
+ sin(L/
cosh(L/
)
n) + n
n ) [sin(x/ n )
sinh(x/
)] , (2.77)
n ) + sinh(L/
[sin(x/n ) n[sin(x/
) sinh(x/
n)
n )] , n(2.77)
sin(L/
4
n)
sin(L/
n ) + nsinh(L/
n)
+
sinh(L/
)
where ⌧n = 4n /↵ = n ⌘/A, and the coefficients B1n are determined by the initial condition.
4
4
4where ⌧nTo
4= obtain
/↵
=
⌘/A,
and
the
coefficients
Bmode,
determined
bythe
thequasi-stationary
initial condition.
1n arelet
an
estimate
for
the
energy
per
us
consider
n
n
=
/↵
=
⌘/A,
and
the
coefficients
B
are
determined
by
the
initial
condition.
n
1n
n
n
To
obtain
an
estimate
for
the
energy
per
mode,
letcase,
us consider
themode-expansion
quasi-stationary
limit,
which
can
be
formally
defined
by
⌘
!
1.
In
this
we
have
the
btain an estimate for the energy per mode, let us consider the quasi-stationary
limit, which can be formally
defined by ⌘ ! 1. In this case, we have the mode-expansion
⇢
1
X
hich can be formally defined by ⌘ ! 1. In this case, we have the mode-expansion
h(x) =
B⇢
cos(x/ n ) +
1
1n cosh(x/ n )
X
⇢
1
n=1
X
h(x) =
B1n cosh(x/ n ) cos(x/ n ) +
h(x) =
B1n cosh(x/
cos(x/n ) +
+
n)
n ) cos(L/
n )cosh(L/
n=1
[sin(x/ n )
n=1
sin(L/n )n+
) +cosh(L/
sinh(L/ nn))
cos(L/
[sin(x/
cos(L/ n ) +
cosh(L/
)
sin(L/ n ) + nsinh(L/
47 n )
sin(L/
n)
+ sinh(L/
n)
[sin(x/
n)
n)
sinh(x/
n )]
sinh(x/
sinh(x/
n )]
.
n )]
.
(2.78)
.
(2.78)
(2.78)
47
47
dunkel@math.mit.edu
sin(L/
n ) + sinh(L/
n)
[sin(x/
n)
sinh(x/
n )]
, (2.77)
where ⌧n = 4n /↵ = 4n ⌘/A, and the coefficients B1n are determined by the initial condition.
To obtain an estimate for the energy per mode, let us consider the quasi-stationary
limit, which can be formally defined by ⌘ ! 1. In this case, we have the mode-expansion
⇢
1
X
h(x) =
B1n cosh(x/ n ) cos(x/ n ) +
n=1
cos(L/
sin(L/
n)
+ cosh(L/ n )
[sin(x/
)
+
sinh(L/
)
n
n
n)
sinh(x/
n )]
.
(2.78)
47
This expression can be inserted into (2.63), and after exploiting orthogonality of the biharmonic eigenfunctions
E'
X
En ,
n=1
AL 2
En =
Bn ,
4
2 n
(2.79)
i.e., the energy per mode is proportional to the square of the amplitude, just as in the
stretching case discussed in Sec. 2.3.2. It is therefore possible to compute thermal expectation values exactly from Gaussian integrals. In particular, from equipartition
AL
1
2
E[En ] =
E[Bn ] = kB T.
2 4n
2
If we combine this with the (crude) harmonic approximation
E[Bn2 ] /
(2.80)
n
/ n, then
kB T
,
4
n
(2.81)
whereas in the stretching case we had found that E[Bn2 ] / kB T /n2 .
dunkel@math.mit.edu
Actin in flow
PRL 108, 038103 (2012)
week ending
20 JANUARY 2012
PHYSICAL REVIEW LETTERS
FIG. 1 (color online). Experimental setup. (a) Microfluidic cross-flow geometry controlled by a pressure difference $P between inlet
and outlet branches. (b) Close-up of the velocity field near the stagnation point, showing a typical actin filament. (c) Raw contour (red)
of an actin filament and definition of geometric quantities used in the analysis.
were stored at !80 " C. Polymerization to form filamentous
actin (F-actin) was achieved by addition of 1=10th volume
of 10 # ABþ , then stabilized by the addition of an equimolar amount (to G-actin monomers) of Alexa Fluor 488
phalloidin (Invitrogen), dissolved to a final concentration
of %10 !M of G-actin, and then stored in the dark at 4 " C
for up to 3 months. For an experiment, an aliquot of
10 # AB! stock was thawed and mixed with 9 parts of
of eigenfunctions W ðnÞ (and eigenvalues &n ) with boundary
conditions Wxx ð)L=2Þ ¼ Wxxx ð)L=2Þ ¼ 0 [3,21]. Under
the convenient rescaling ' ¼ $x=L, these obey
Kantsler & Goldstein (2012) PRL
ðnÞ
W4'
! !@' ½ð$2 =4 ! '2 ÞW'ðnÞ - ¼ "n W ðnÞ :
(3)
The eigenvalues "n ¼ L4 &n =$4 A are functions of [22]
dunkel@math.mit.edu
_ 4
2!%L
Actin in flow
PRL 108, 038103 (2012)
PHYSICAL REVIEW LETTERS
FIG. 1 (color online). Experimental setup. (a) Microfluidic cross-flow geometry controlled by a pressure differenc
and outlet branches. (b) Close-up of the velocity field near the stagnation point, showing a typical actin filament. (c
of an actin filament and definition of geometric quantities used in the analysis.
Kantsler & Goldstein (2012) PRL
were stored at !80 " C. Polymerization to form filamentous
actin (F-actin) was achieved by addition of 1=10th volume
of eigenfunctions W ðnÞ (and eigenvalues &
conditions Wxxdunkel@math.mit.edu
ð)L=2Þ ¼ Wxxx ð)L=2Þ ¼
8, 038103 (2012)
P Hflow
YSICAL
Actin in
REVIEW
Kantsler
&
Goldstein
(2012)
PRL
dunkel@math.mit.edu
olor online). The stretch-coil transition of single
actin filam
Consider an elastic filament of contour length L, diameter a, with " & a=L ' 1, bending modulus A ¼ kB T‘p ,
where ‘p is the persistence length, lying in the xy plane
between x ¼ )L=2. For small-amplitude fluctuations in
the position hðxÞ from y ¼ 0, its energy is
Theory
1 Z L=2
E ¼
dxfAh2xx þ #ðxÞh2x g;
2 !L=2
(1)
where subscripts indicate differentiation. The nonuniform
tension induced by the flow [19],
2$!%_
2 =4 ! x2 Þ;
#ðxÞ ¼
ðL
lnð1="2 eÞ
(2)
k0 ¼ 0
1=2Þ$
cally [
ward.
W ð1Þ fo
tal ben
which
[13] is
energy
penden
tegrati
render
(and w
yields
VðxÞ ¼
which peaks at the center and vanishes at the filament
ends, is positive (extensional) for %_ > 0 and compressional
otherwise [20]. We first focus on extensional suppression
of fluctuations. The often-used Fourier decomposition
As
of hðxÞ [13,16] is incompatible with the forceand
dunkel@math.mit.edu
e stagnation point, showing a typical actin filament. (c) Raw contour (red)
used in the analysis.
tous
ume
mo488
tion
4 "C
t of
s of
duce
ding
nger
cose
ose.
ents
3 to
Theory
of eigenfunctions W ðnÞ (and eigenvalues &n ) with boundary
conditions Wxx ð)L=2Þ ¼ Wxxx ð)L=2Þ ¼ 0 [3,21]. Under
the convenient rescaling ' ¼ $x=L, these obey
ðnÞ
W4'
! !@'
½ð$2 =4
!
ðnÞ
2
' ÞW' -
¼ "n W ðnÞ :
(3)
The eigenvalues "n ¼ L4 &n =$4 A are functions of [22]
_ 4
2!%L
!¼ 3
:
2
$ A lnð1=" eÞ
(4)
When ! ¼ 0, the W ðnÞ are eigenfunctions of the onedimensional biharmonic equation
W!¼0 ¼ A sinkx þ B sinhkx þ D coskx þ E coshkx: (5)
The wave vectors kn satisfy coskn L coshkn L ¼ 1, with
’ ðn þ
k0 ¼ 0 (the constant solution W ð0Þ ¼ 1), and kn Ldunkel@math.mit.edu
nuniform
(1)
nonuniform
(2)
(2)
n the
n
n !
[13] is that if hðxÞ ¼ n an W ðnÞ ðxÞ, then for any
tegrations
by aparts,
Eq. (3), from
andindeboundary conditions that
energy
decomposes into
sum
P of contributions
pendent modes: E ¼ ð1=2Þ n &n a2n . This follows from inðnÞ
render
the
operator
self-adjoint
and
the
W
orthogonal
tegrations by parts, Eq. (3), and boundary conditions that
render
the operator
self-adjoint
and the
orthogonal
(and
we assume
they
areW ðnÞnormalized).
Equipartition then
(and we assume they are normalized). 4Equipartition
then
4
yields
ha(mmnaLn4=$
i¼
( , andL the
=$local‘pvariance
"n , and the local variance
4‘ "
yields
ham an i ¼
p nmn
2
#
# 2 i is
i is ! hVðxÞVðxÞ
¼ h½hðxÞ
!
h¼ h½hðxÞ
Theory vs. experiment
he filament
1
filament
L3 X
W ðnÞ ðxÞ2
mpressional
1(6) ðnÞ
Vðx; !Þ ¼
: 3
2
X
4
suppression
L
W
ðxÞ
"
ð!Þ
ressional
‘p $ n¼1 n
Vðx; !Þ ¼
:
omposition
4
pression
"n ð!Þ
‘p $ energy
As the contribution to "n from the bending
forceand
n¼1
4 , the fundamental mode
P H YWSð1ÞI domiCAL REVIEW
ment ends.PRLgrows
ðn þ 1=2Þ
108, like
038103
(2012)
mposition
efines a set
nates. This is seen in Fig. 2(b), where we plot the measured
(6)
LETTERS
As the contribution to "n from the bending energy
ce- and
4 , the fundamental mode W ð1Þ domint ends.
grows
like
ðn
þ
1=2Þ
038103-2
nes a set
nates. This is seen in Fig. 2(b), where we plot the measured
038103-2
FIG. 2 (color online). Filament modes, fluctuations, and dynamics in the extensional regim
for " ¼ 100 (red dash
eigenfunctions W ðnÞ (solid lines) obtained from (3) for " ¼ 0, and W ð1Þ
dunkel@math.mit.edu