Document 10694264
advertisement

Fluctuation-dissipation relations & fluctuation theorems
18.S995 - L07
1.7thermal
Fluctuation-dissipation
relation
pumping allows particles to climb
up-hill (see slides for an illustration).
Until now, we focused primarily on over-damped Brownian motion processes, as sufficient
to describe low-Reynolds number object. When inertia is not negligible, the above concepts
can be easily extended by adding friction and noise to the Hamiltonian equation of motions.
Considering a Hamiltonian H(x1 , . . . , xN , p1 , . . . , pN ), the corresponding system of SDEs
Until now, we focused primarily on over-damped Brownian motion processes, as su
reads
1.7
Fluctuation-dissipation relation
to describe low-Reynolds number
object. When inertia is not negligible, the above co
@H
dxi =
dt friction and noise to the Hamiltonian
(1.132a)
can be easily extended
by adding
equation of m
@pi
Considering a Hamiltonian@H
H(x1 , . . . , xNp
, p1 , . . . , pN ), the corresponding system o
dpi =
dt
pi dt + 2D dBi (t).
(1.132b)
@xi
reads
where (B1 (t), . . . , BN (t)) are standard Brownian
@H motions, is the Stokes friction coefficient
dt The last two terms in Eq. (1.132b)
(
i =
and D the di↵usion constant in dx
momentum
space.
@pi
provide an e↵ective description of the momentum transfer with ap
surrounding heat bath.
@H
If the Hamiltonian has the standard
form
dpi =
dt
pi dt + 2D dBi (t).
(1
@xi
X p2
i
H=
+ U (x1 , . . . , xN ),
(1.133)
2m
where (B1 (t), . . . , BN (t)) are
standard Brownian motions, is the Stokes friction coe
i
and D the di↵usion constant in momentum space. The last two terms in Eq. (1
corresponding to momentum coordinates pi = mẋi , then the overdamped SDE is formally
provide
an e↵ective
of the
momentum
transfer
with a surrounding hea
recovered
by assuming
dpi 'description
0 in Eq. (1.132b)
and
dividing by m
, yielding
If the Hamiltonian has the standardsform
1 @U X 2D
dxi =
dt + p2i2 2 dBi (t).
(1.134)
m @x
m + U (x1 , . . . , xN ),
H i=
i
2m
We see that the spatial di↵usion constant D and the momentum di↵usion constant D are
related
by
corresponding
to momentum coordinates pi = mẋi , then the overdamped SDE is fo
recovered by assuming dpi ' 0 in Eq.
D (1.132b) and dividing by m , yielding
D = 2 2.
(1.135)
m
s
1.7
Fluctuation-dissipation
relation
1.7
Fluctuation-dissipation
relation
thermal
pumping allows particles to
climb
up-hill (see slides for an illustration).
Until
we focused
focusedprimarily
primarily
over-damped
Brownian
motion
processes,
as sufficient
Until now,
now, we
onon
over-damped
Brownian
motion
processes,
as sufficient
totodescribe
low-Reynoldsnumber
number
object.
When
inertia
not negligible,
the above
concepts
describe low-Reynolds
object.
When
inertia
is notisnegligible,
the above
concepts
canbe
be easily
easily extended
friction
andand
noise
to the
equation
of motions.
can
extendedbybyadding
adding
friction
noise
to Hamiltonian
the Hamiltonian
equation
of motions.
Considering aa Hamiltonian
systemsystem
of SDEs
1 , .1., .. ,.x
Considering
HamiltonianH(x
H(x
. N, x, pN1,, p. .1., ,.p.N. ,),pNthe
), corresponding
the corresponding
of SDEs
reads
Until now, we focused primarily on over-damped Brownian motion processes, as su
reads
1.7
Fluctuation-dissipation relation
@H
to describe low-Reynolds
number
object. When inertia is not (1.132a)
negligible, the above co
@H
dxi =
dt
dxi =
dt friction and noise to the Hamiltonian
(1.132a)
i
can be easily extended
by@padding
equation of m
@pi
p
@H
Considering a Hamiltonian
H(x1p,i dt
. . +. , x2D
, dB
p1 ,i (t).
. . . , pN ), the corresponding
system o
dpi =
dt
(1.132b)
@H
Np
dpi = @xi dt
pi dt + 2D dBi (t).
(1.132b)
@xi
reads
where (B1 (t), . . . , BN (t)) are standard Brownian motions, is the Stokes friction coefficient
where
. . . , BNconstant
(t)) are standard
Brownian
is the
Stokes
friction
coefficient
@H motions,
1 (t),
and D(B
the
di↵usion
in momentum
space.
The last two
terms
in Eq.
(1.132b)
dx
=
dt The
imomentum
and
D the
di↵usiondescription
constant of
inthe
momentum
space.
two terms heat
in Eq.
(1.132b)
provide
an e↵ective
transfer
withlast
a surrounding
bath.
@pi
If the Hamiltonian
the standard
provide
an e↵ectivehas
description
of form
the momentum transfer with ap
surrounding heat bath.
@H
If the Hamiltonian has the standard
Xdppi2form
=
dt
pi dt + 2D dBi (t).
i
H=
+
U
(x
,
.
.
.
,
x
),
(1.133)
1 @xi N
2
X
2m
pi
i
H=
2m
+ U (x1 , . . . , xN ),
(
(1
(1.133)
where (Bto
. . . , BNcoordinates
(t)) are
standard
Brownian
motions,
the Stokes friction coe
1 (t),
i
corresponding
momentum
pi = mẋi , then
the overdamped
SDE isisformally
recovered
assuming
dpi ' 0 constant
in Eq. (1.132b)
and dividing byspace.
m , yielding
and Dby the
di↵usion
in momentum
The last two terms in Eq. (1
corresponding to momentum
coordinates pi = mẋi , then the overdamped SDE is formally
s the momentum transfer with a surrounding hea
provide
an
e↵ective
description
of
recovered by assuming dpi ' 0 in1 Eq.
and dividing by m , yielding
@U (1.132b)2D
dxi has
= the standard
dt +
dBi (t).
(1.134)
If the Hamiltonian
form
s
2
2
m @xi
m
1 @U X 2D
2
dx
=
dt
+
dBi (t).di↵usion constant D are(1.134)
p
i
2
2
i
We see that the spatial di↵usion constant
D
and
the
momentum
m @x
m + U (x1 , . . . , xN ),
H i=
related by
i
2m
We see that the spatial di↵usion constantDD and the momentum di↵usion constant D are
D = 2 2.
(1.135)
related
by
corresponding
to momentum
coordinates
pi = mẋi , then the overdamped
SDE is fo
m
recovered
by assuming
dpi '
0 in Eq.
(1.132b)
and
dividing
by
m
,. ,yielding
Dthe phase
The Fokker-Planck
equation (FPE)
governing
space
PDF
f
(t,
x
,
.
.
.
,
x
,
p
,
.
.
pN )
1
N
1
D = 2 2.
(1.135)
m
s
of the stochastic process (1.132) reads
1.7thermal
Fluctuation-dissipation
relation
2
pumping allowsX
particles
to
climb
up-hill (see slides for an illustration).
p
H=
i
+ U (x1 , . . . , xN ),
(1.133)
2m
Until now, we focused primarily on
i over-damped Brownian motion processes, as sufficient
to describe low-Reynolds number object. When inertia is not negligible, the above concepts
corresponding to momentum coordinates pi = mẋi , then the overdamped SDE is formally
can be easily extended by adding friction and
noise to the Hamiltonian equation of motions.
recovered by assuming dpi ' 0 in Eq. (1.132b) and dividing by m , yielding
Considering a Hamiltonian H(x1 , . . . , xN , p1 , . . . , pN ), the corresponding system of SDEs
s
Until now, we focused primarily
on
over-damped
Brownian motion processes, as su
reads
1 @U
2D
1.7
Fluctuation-dissipation relation
dxi =
dt +object.
dBi (t).
(1.134)
to describe low-Reynolds
@H
mnumber
@xi
m2 2 When inertia is not negligible, the above co
dxi =
dt friction and noise to the Hamiltonian
(1.132a)
can be easily extended
by adding
equation of m
@pi
We Considering
see that the spatial
di↵usion constant
constant D are
p
a Hamiltonian
H(xD1 ,and
. . .the
, xNmomentum
, p1 , . . . , pdi↵usion
@H
N ), the corresponding system o
dpi =
dt
pi dt + 2D dBi (t).
(1.132b)
related by
@xi
reads
D
D Brownian
= 2 @H
. motions,
where (B1 (t), . . . , BN (t)) are standard
2
m
dx =
dt
is the Stokes friction(1.135)
coefficient
(
i
and D the di↵usion constant in momentum
space. The last two terms in Eq. (1.132b)
@pthe
i
The Fokker-Planck
equation (FPE)
phase
space
PDF
f (t, x1 , . . . , xNheat
, p1 , .bath.
. . , pN )
provide
an e↵ective description
of thegoverning
momentum
transfer
with
ap
surrounding
@H
the Hamiltonian
stochastic process
(1.132)
reads form
Ifofthe
has the
standard
dpi =
dt
pi dt + 2D dBi (t).
(1
✓
◆
✓
◆
@xi @
2
X @H @f X
X
@Hp@f
@f
i
@t f +
=
p
f
+
D
(1.136)
H=
+ U (x1 , . . . , xN ),i
(1.133)
@p
@x
@x
@p
@p
@p
i are 2m
istandard
i
i
i
where (B1 (t), . i. . , BNi (t))
motions,
is the Stokes friction coe
i Brownian
i
and D the di↵usion constant in momentum space. The last two terms in Eq. (1
corresponding to momentum coordinates p28
i = mẋi , then the overdamped SDE is formally
provide
an e↵ective
of the
momentum
transfer
with a surrounding hea
recovered
by assuming
dpi 'description
0 in Eq. (1.132b)
and
dividing by m
, yielding
If the Hamiltonian has the standardsform
1 @U X 2D
dxi =
dt + p2i2 2 dBi (t).
(1.134)
m @x
m + U (x1 , . . . , xN ),
H i=
i
2m
We see that the spatial di↵usion constant D and the momentum di↵usion constant D are
related
by
corresponding
to momentum coordinates pi = mẋi , then the overdamped SDE is fo
recovered by assuming dpi ' 0 in Eq.
D (1.132b) and dividing by m , yielding
D = 2 2.
(1.135)
m
s
1.7thermal
Fluctuation-dissipation
relation
2
pumping allowsX
particles
to
climb
up-hill (see slides for an illustration).
p
H=
i
+ U (x1 , . . . , xN ),
(1.133)
2m
Until now, we focused primarily on
i over-damped Brownian motion processes, as sufficient
to describe low-Reynolds number object. When inertia is not negligible, the above concepts
corresponding to momentum coordinates pi = mẋi , then the overdamped SDE is formally
can be easily extended by adding friction and
noise to the Hamiltonian equation of motions.
recovered by assuming dpi ' 0 in Eq. (1.132b) and dividing by m , yielding
Considering a Hamiltonian H(x1 , . . . , xN , p1 , . . . , pN ), the corresponding system of SDEs
s
Until now, we focused primarily
on
over-damped
Brownian motion processes, as su
reads
1 @U
2D
1.7
Fluctuation-dissipation relation
dxi =
dt +object.
dBi (t).
(1.134)
to describe low-Reynolds
@H
mnumber
@xi
m2 2 When inertia is not negligible, the above co
dxi =
dt friction and noise to the Hamiltonian
(1.132a)
can be easily extended
by adding
equation of m
@pi
We Considering
see that the spatial
di↵usion constant
constant D are
p
a Hamiltonian
H(xD1 ,and
. . .the
, xNmomentum
, p1 , . . . , pdi↵usion
@H
N ), the corresponding system o
dpi =
dt
pi dt + 2D dBi (t).
(1.132b)
related by
@xi
reads
D
D Brownian
= 2 @H
. motions,
where (B1 (t), . . . , BN (t)) are standard
2
m
dx =
dt
is the Stokes friction(1.135)
coefficient
(
i
and D the di↵usion constant in momentum
space. The last two terms in Eq. (1.132b)
@pthe
i
The Fokker-Planck
equation (FPE)
phase
space
PDF
f (t, x1 , . . . , xNheat
, p1 , .bath.
. . , pN )
provide
an e↵ective description
of thegoverning
momentum
transfer
with
ap
surrounding
@H
the Hamiltonian
stochastic process
(1.132)
reads form
Ifofthe
has the
standard
dpi =
dt
pi dt + 2D dBi (t).
(1
✓
◆
✓
◆
@xi @
2
X @H @f X
X
@Hp@f
@f
i
@t f +
=
p
f
+
D
(1.136)
H=
+ U (x1 , . . . , xN ),i
(1.133)
@p
@x
@x
@p
@p
@p
i are 2m
istandard
i
i
i
where (B1 (t), . i. . , BNi (t))
motions,
is the Stokes friction coe
i Brownian
i
and D the di↵usion constant in momentum space. The last two terms in Eq. (1
corresponding to momentum coordinates p28
i = mẋi , then the overdamped SDE is formally
provide
an e↵ective
of the
momentum
transfer
with a surrounding hea
recovered
by assuming
dpi 'description
0 in Eq. (1.132b)
and
dividing by m
, yielding
the vanishes
Hamiltonian
the standard
form
TheIflhs.
if f is has
a function
of the s
Hamiltonian
H. The rhs. vanishes for the
1 @U X 2D
particular ansatz
dxi =
dt + p2i2 2 dBi (t).
(1.134)
m @x
m ◆
i= ✓
H
+ U (x1 , . . . , xN ),
1
H
(1.137)
f = exp i 2m .
Z D and
kBthe
T momentum di↵usion constant D are
We see that the spatial di↵usion constant
related
by
corresponding
to momentum
coordinates
ẋisee
, then
SDE is fo
i = m
where T is the temperature
of the surrounding
heat pbath.
To
this, the
noteoverdamped
that
recovered by assuming dpi ' 0 in✓Eq.
and dividing by m , yielding
D (1.132b)
◆
.
(1.135)
@f
1 @HD = m2 2H
1 pi
=
exp
= s
f
(1.138)
thermal pumping allows particles to climb up-hill (see slides for an illustration).
D=
1.7
D
.
2
2
m
(1.135)
Fluctuation-dissipation relation
The Fokker-Planck equation (FPE) governing the phase space PDF f (t, x1 , . . . , xN , p1 , . . . , pN )
of the stochastic process (1.132) reads
◆ X
✓
◆
Until now,X
we✓focused primarily
on over-damped
Brownian
motion processes, as su
@H @f
@H @f
@
@f
@t f + low-Reynolds number
= object. When
pi f + Dinertia is not (1.136)
to describe
negligible, the above co
@p
@x
@x
@p
@p
@p
i
i
i
i
i
i
i
i
can be easily extended by adding friction and noise to the Hamiltonian equation of m
Considering a Hamiltonian H(x
28 , . . . , xN , p1 , . . . , pN ), the corresponding system o
The lhs. vanishes if f is a function of the1 Hamiltonian
H. The rhs. vanishes for the
reads ansatz
particular
✓
where T
◆
@H
1
H
(1.137)
f=
dxZi exp
= k T dt.
B
@p
i
@Hbath. To see this,p
is the temperature of the surrounding heat
note that
dpi =✓
dt
pi dt + 2D dBi (t).
◆
@f
1 @H
H@xi
1 pi
@pi
=
kB T @pi
exp
kB T
=
kB T m
f
(
(1
(1.138)
where (B1 (t), . . . , BN (t)) are standard Brownian motions, is the Stokes friction coe
soand
that D
the the
components
of theconstant
dissipative in
momentum
current,space. The last two terms in Eq. (1
di↵usion
momentum
✓
◆
✓
◆
✓
◆
@fdescription of D
D
provide
an e↵ective
thepi momentum
transfer
with
a surrounding hea
Ji =
pi f + D
=
pi f
f =
pi f
(1.139)
kB T form
m
mkB T
i
If the Hamiltonian@phas
the standard
vanishes if
X p2
i
H=
+
U (x1 , . . . , xN ),
kB T
2m
D = mkB T
,
D=
.
(1.140)
i
m
Equation
(1.140) is the
relation, p
connecting
the di↵usion constant
corresponding
to fluctuation-dissipation
momentum coordinates
i = mẋi , then the overdamped SDE
(strength of the fluctuations) and the friction coefficient (dissipation) through the temperrecovered by assuming dpi ' 0 in Eq. (1.132b) and dividing by m , yielding
ature of the bath.
s
is fo
thermal pumping allows particles to climb up-hill (see slides for an illustration).
D=
1.7
D
.
2
2
m
(1.135)
Fluctuation-dissipation relation
The Fokker-Planck equation (FPE) governing the phase space PDF f (t, x1 , . . . , xN , p1 , . . . , pN )
of the stochastic process (1.132) reads
◆ X
✓
◆
Until now,X
we✓focused primarily
on over-damped
Brownian
motion processes, as su
@H @f
@H @f
@
@f
@t f + low-Reynolds number
= object. When
pi f + Dinertia is not (1.136)
to describe
negligible, the above co
@p
@x
@x
@p
@p
@p
i
i
i
i
i
i
i
i
can be easily extended by adding friction and noise to the Hamiltonian equation of m
Considering a Hamiltonian H(x
28 , . . . , xN , p1 , . . . , pN ), the corresponding system o
The lhs. vanishes if f is a function of the1 Hamiltonian
H. The rhs. vanishes for the
reads ansatz
particular
◆
The lhs. vanishes if f is a function of ✓
the Hamiltonian
H. The rhs. vanishes for the
@H
1
H
particular ansatz
(1.137)
f=
dxZi exp
= k T dt.
(
B
✓@p
i ◆
1
H
. To see this,p
(1.137)
f
=
exp
@H
where T is the temperature of the surrounding
heat
bath.
note that
Z
k
T
B dt
dpi =✓
pi dt + 2D dBi (t).
(1
◆
i
@f
1 the
@Hsurrounding
H@x
1 To
pi see this, note that
where T is the temperature
of
heat
bath.
=
exp
=
f
(1.138)
@pi
kB T @pi
k
T
k
T
m
B
✓ B
◆
where (B1 (t), . . . ,@fBN (t))1 are
standard
Brownian
@H
H
1 pimotions, is the Stokes friction coe
= dissipative
exp
=
f
(1.138)
soand
that D
the the
components
of
the
momentum
current,
@p
k
T
@p
k
T
k
T
m
di↵usion
constant
in momentum
i
B
i
B
B space. The last two terms in Eq. (1
✓
◆
✓
◆
✓
◆
@fdescription of
D
D
provide
an e↵ective
thepi momentum
transfer
with
a surrounding hea
so that
Ji =the components
pi f + D of the=dissipative
pi f momentum
f current,
=
pi f
(1.139)
@p
kB T form
m ◆
i
✓
◆the standard
✓
✓ mkB T ◆
If the Hamiltonian
has
@f
D pi
D
J
=
p
f
+
D
=
p
f
f
=
pi f
(1.139)
i
i
vanishes if i
2
X
@pi
kB Tpm
mkB T
i
H=
+
U (x1 , . . . , xN ),
k
T
B
vanishes if
2m
D = mkB T
,
D=
.
(1.140)
i
m
kB T
D = mkB T
,
D=
.
(1.140)
Equation
(1.140)
is
the
fluctuation-dissipation
relation,
connecting
the
di↵usion
constant
m
corresponding to momentum coordinates pi = mẋi , then the overdamped SDE is fo
(strength of the fluctuations) and the friction coefficient (dissipation) through the temperrecovered
by assuming
dpi ' 0 in Eq.relation,
(1.132b)
and dividing
m , yielding
Equation
(1.140)
is the fluctuation-dissipation
connecting
the di↵usionby
constant
ature
of the bath.
(strength of the fluctuations) and the friction coefficient (dissipation)
through the tempers
thermal pumping allows particles to climb up-hill (see slides for an illustration).
D=
1.7
D
.
2
2
m
(1.135)
Fluctuation-dissipation relation
The Fokker-Planck equation (FPE) governing the phase space PDF f (t, x1 , . . . , xN , p1 , . . . , pN )
of the stochastic process (1.132) reads
◆ X
✓
◆
Until now,X
we✓focused primarily
on over-damped
Brownian
motion processes, as su
@H @f
@H @f
@
@f
@t f + low-Reynolds number
= object. When
pi f + Dinertia is not (1.136)
to describe
negligible, the above co
@p
@x
@x
@p
@p
@p
i
i
i
i
i
i
i
i
can be easily extended by adding friction and noise to the Hamiltonian equation of m
Considering a Hamiltonian H(x
28 , . . . , xN , p1 , . . . , pN ), the corresponding system o
The lhs. vanishes if f is a function of the1 Hamiltonian
H. The rhs. vanishes for the
reads ansatz
particular
◆
The lhs. vanishes if f is a function of ✓
the Hamiltonian
H. The rhs. vanishes for the
@H
1
H
particular ansatz
(1.137)
f=
dxZi exp
= k T dt.
(
B
✓@p
i ◆
1
H
. To see this,p
(1.137)
f
=
exp
@H
where T is the temperature of the surrounding
heat
bath.
note that
Z
k
T
B dt
dpi =✓
pi dt + 2D dBi (t).
(1
◆
i
@f
1 the
@Hsurrounding
H@x
1 To
pi see this, note that
where T is the temperature
of
heat
bath.
=
exp
=
f
(1.138)
@pi
kB T @pi
k
T
k
T
m
B
✓ B
◆
where (B1 (t), . . . ,@fBN (t))1 are
standard
Brownian
@H
H
1 pimotions, is the Stokes friction coe
= dissipative
exp
=
f
(1.138)
soand
that D
the the
components
of
the
momentum
current,
@p
k
T
@p
k
T
k
T
m
di↵usion
constant
in momentum
i
B
i
B
B space. The last two terms in Eq. (1
✓
◆
✓
◆
✓
◆
@fdescription of
D
D
provide
an e↵ective
thepi momentum
transfer
with
a surrounding hea
so that
Ji =the components
pi f + D of the=dissipative
pi f momentum
f current,
=
pi f
(1.139)
@p
kB T form
m ◆
i
✓
◆the standard
✓
✓ mkB T ◆
If the Hamiltonian
has
@f
D pi
D
J
=
p
f
+
D
=
p
f
f
=
pi f
(1.139)
i
i
vanishes if i
2
X
@pi
kB Tpm
mkB T
i
H=
+
U (x1 , . . . , xN ),
k
T
B
vanishes if
2m
D = mkB T
,
D=
.
(1.140)
i
m
kB T
D = mkB T
,
D=
.
(1.140)
Equation
(1.140)
is
the
fluctuation-dissipation
relation,
connecting
the
di↵usion
constant
m
corresponding to momentum coordinates pi = mẋi , then the overdamped SDE is fo
(strength of the fluctuations) and the friction coefficient (dissipation) through the temperrecovered
by assuming
dpi ' 0 in Eq.relation,
(1.132b)
and dividing
m , yielding
Equation
(1.140)
is the fluctuation-dissipation
connecting
the di↵usionby
constant
ature
of the bath.
(strength of the fluctuations) and the friction coefficient (dissipation)
through the tempers
1.8
Fluctuation theorems
20
Microbiological systems often perform ‘thermodynamic’ oper
number of degrees of freedom. To characterize biological motor
in terms of thermodynamic quantities (work, entropy, etc.), an
thermodynamic concepts to non-equilibrium processes is has bee
decade. Theoretical work in this direction was triggered by the
perimental techniques [BSLS00] that make it possible to probe
characteristics of individual DNA molecules with the help of opt
for a simple schematic). These e↵orts led, amongst others, to t
of exact fluctuation theorems (FTs) for non-equilibrium system
which we will discuss below.
The total Hamiltonian comprising the system of interest, e.g. a
by coordinates x(t)), its environment y and mutual interactions
http://hansmalab.physics.ucsb.edu/forcespec.html
H(x, y; (t)) = H(x; (t)) + Henv (y) + Hint (x
wherehttp://www.microscopy-analysis.com
(t) denotes one or more external control parameters (e.g
Single-molecule force measuring experiments by using AFM (a) and laser tweezers (b).
Hummer G , and Szabo A PNAS 2001;98:3658-3661
©2001 by National Academy of Sciences
winding. We constructed a simple ‘toy’ model in which the radius of
the helix was allowed to vary as the molecule was stretched, and asked
whether this model could capture the twist–stretch coupling and
other mechanical properties of DNA.
The model consists of an elastic rod with a stiff helical ‘wire’
(analogous to the sugar-phosphate backbone) affixed to the outside
surface (Fig. 3a). The inner rod is constructed from a material with a
Poisson’s ratio n ¼ 0.5, so that it conserves volume under stress23. As
this system is stretched, the inner rod decreases in diameter. When
the model is stretched without constraining twist, changes in helicity
arise from the tendency of the stiff outer ‘wire’ to resist changes in
contour length (Fig. 3b). The inner rod alone has stretch modulus
Br ¼ p2,4
R4r Y r =4 and torsional
rigidity
Sr ¼ pR2r Y r , bending rigidity
1
2
LETTERS
torsion and also generates a non-zero twist–stretch coupling, g. With
the three free parameters fitted to R r ¼ 0.924 nm (close to the
crystallographic radius of DNA), S h ¼ 965 pN, and Y r ¼ 0.393 GPa
(similar to estimated
Y values
for DNA and within the range of
Vol 442|17 August
2006|doi:10.1038/nature04974
measured Y values for bulk polymeric materials14,24,26), we obtain
the correct experimentally measured values for the mechanical
parameters of DNA: B eff ¼ 225 pN nm 2 , C eff ¼ 460 pN nm 2 ,
g ¼ 290 pN nm and S eff ¼ 1,081 pN.
Although construction of this toy DNA model was motivated by
the discovery of negative twist–stretch coupling, it also provides a
possible explanation for the anomalously large torsional rigidity of
DNA. For an isotropic rod, the torsional rigidity C must be smaller
than the bending rigidity
B (see equation for
C above) unless the rod
2
1–4 r
DNA overwinds when stretched
Jeff Gore †, Zev Bryant †, Marcelo Nöllmann , Mai U. Le2, Nicholas R. Cozzarelli ‡ & Carlos Bustamante
DNA is often modelled as an isotropic rod1–4, but its chiral
structure suggests the possible importance of anisotropic mechanical properties, including coupling between twisting and stretching degrees of freedom. Simple physical intuition predicts that
DNA should unwind under tension, as it is pulled towards a
denatured structure4–8. We used rotor bead tracking to directly
measure twist–stretch coupling in single DNA molecules. Here we
show that for small distortions, contrary to intuition, DNA overwinds under tension, reaching a maximum twist at a tension of
,30 pN. As tension is increased above this critical value, the DNA
begins to unwind. The observed twist–stretch coupling predicts
that DNA should also lengthen when overwound under constant
tension, an effect that we quantitatively confirm. We present a
simple model that explains these unusual mechanical properties,
and also suggests a possible origin for the anomalously large
torsional rigidity of DNA. Our results have implications for the
action of DNA-binding proteins that must stretch and twist DNA
to compensate for variability in the lengths of their binding
sites9–11. The requisite coupled DNA distortions are favoured by
the intrinsic mechanical properties of the double helix reported
here.
Many cellular proteins bend or wrap DNA upon binding, loop
DNA to make contact with two non-adjacent binding sites, or twist
DNA during translocation along the double helix12. The energetics of
these distortions are governed by the mechanical properties of DNA,
which have been investigated using a variety of bulk1 and singlemolecule techniques2,3. For small deformations, DNA in physiological buffer is modelled as an isotropic rod with bending rigidity
B ¼ 230 ^ 20 pN nm2, twist rigidity C ¼ 460 ^ 20 pN nm2, and
stretch modulus S ¼ 1,100 ^ 200 pN (refs 3, 13–16; and Z.B, J.G.,
N.R.C. and C.B, manuscript in preparation).
A fourth mechanical parameter is allowed in the linear theory of a
deformable rod5,6,17: the twist–stretch coupling g, which specifies how
the twist of the helix changes when the molecule is stretched. At
forces sufficient
to stretched.
suppress bending
fluctuations,
theconstruct
energy of afor
Figure 1 | DNA overwinds
when
a, The
molecular
5,6,17
: sites and
stretched
and twisted
DNA molecule
may be written
as
rotor bead tracking
experiments
contains
three distinct
attachment
DNA:protein complexes showed a weak positive correlation between
twist and rise, implying a negative g value9. All-atom simulations
have likewise suggested that twist and rise may be positively correlated for small distortions10,19. Finally, in contrast to the overstretching transition8,13,14 (in which DNA unwinds as it extends), the B–A
transition involves a slight unwinding coupled to compression of the
DNA helix20. Conclusive determination of the sign and magnitude of
g requires direct measurement in isolated DNA molecules.
To measure the twist–stretch coupling of DNA, we used the rotor
bead tracking technique13,15,21, in which a submicrometre ‘rotor’ bead
is attached to the middle of a stretched DNA molecule, immediately
below a free swivel consisting of an engineered single strand nick
(Fig. 1a, b). Tension is applied to the molecule using magnetic
tweezers2,4. Changes in the rotor bead angle reflect changes in the
twist of the lower DNA segment.
Under fixed tension, the rotor bead fluctuated around a mean
angle as a result of thermal noise (Fig. 1c). As the molecule was
stretched by increasing the magnetic force, the mean angle of the
rotor bead increased. A ,1% stretching of DNA led to an increase in
the twist of ,0.1% (Fig. 1d). Analysis of this data yielded a twist–
stretch coupling constant g ¼ 290 ^ 20 pN nm (N ¼ 4 molecules),
opposite in sign to most previous estimates5–7 but consistent with
twist–rise correlations in crystal structures9 and molecular simulations10,19. Our measurement of g was robust to alterations in the
length and sequence of the torsionally constrained DNA segment
(Fig. 1d).
For small deformations, we have shown that DNA overwinds when
stretched. However, in the limit of high forces, DNA must eventually
unwind as the backbone is pulled straight. To test for sign reversal of g
at elevated tensions, we monitored the twist of DNA molecules while
gradually increasing the magnetic force. We found that the twist of
DNA increases until the tension reaches a critical value F c < 30 pN,
beyond which the DNA begins to unwind (Fig. 1e).
The negative twist–stretch coupling g observed at lower tensions
implies
that DNA should
overwound
(Fig. 2a,
b). Tolinearly with applied
overwinding
of thelengthen
DNA. when
d, The
overwinding
scales
predict
the expected
magnitude
of this
effect,
we write the total
tension
and with
the length
of the
torque-bearing
DNA segment. Plotted
LETTERS
NATURE|Vol 442|17 August 2006
Figure 2 | DNA extends when overwound under constant tension.
a, b, Rotating magnets4 were used to introduce torque into a single 14.8-kb
DNA tether. c, Raw data trace demonstrating that overwinding the DNA
molecule at constant tension (9 pN) caused the DNA to extend. d, Relative
extension as a function of the number of excess turns at 9 pN (green squares)
and 18 pN (blue circles). Each data point shows the mean ^ s.e.m. for a
minimum of three molecules. The red line is the predicted behaviour based
upon our prior determination of the twist–stretch coupling,
g ¼ 290 pN nm. Alternative axes show the percentage increase in length
induced by a fractional increase in twist, j.
is constructed from a material with a negative Poisson’s ratio (having
the unlikely property that the radius increases as the rod is stretched).
It has therefore long been puzzling that most measurements of C have
been larger than B for DNA27. However, unlike the isotropic rod
model, our toy model displays the correct values of B and C without
resorting to exotic material properties. The outer helix stiffens the
system to torsion because any twisting of the model DNA requires
stretching or compression of the outer helical ‘wire’.
In the toy model, negative twist–stretch coupling"p
occurs
ffiffiffi# only for
shallow helix angles below a critical angle ac ¼ arctan n < 0:62 rad.
The geometry of B-form DNA lies just within the regime of negative
coupling a ¼ arctan ð3:4 nm=2pRr Þ < 0:53 rad , ac . Although the
model is only intended to capture the behaviour of DNA for small
twist–stretch coupling has not been observed experimentally in the
past? One study7 obtained the incorrect sign for the coupling by
analysing relatively noisy magnetic-tweezers data4 that were generated to study DNA buckling, an effect with a much larger signal than
the twist–stretch coupling. In the final phases of preparing this
manuscript, we learned that Croquette and co-workers had performed a new set of magnetic-tweezers measurements, focusing on
changes in extension of DNA under small changes in twist. They find
that overwinding causes DNA to extend28, in agreement with the
results presented in Fig. 2.
As discussed in ref. 10, the anomalous twist–stretch coupling of
DNA has important implications for plasticity in site recognition by
DNA-binding proteins. Consider the effect of a base-pair insertion or
perimental
techniques
ature of the
bath. [BSLS00] that make it possible to probe the folding and twisting
characteristics of individual DNA molecules with the help of optical tweezers (see Fig. 1.1
for a simple schematic). These e↵orts led, amongst others, to the discovery of a number
of1.8
exact fluctuation
theorems (FTs)
for non-equilibrium systems, the simplest version of
Fluctuation
theorems
which we will discuss below.
20
Microbiological
systems
often perform
‘thermodynamic’
withdescribed
a mesoscopic
The
total Hamiltonian
comprising
the system
of interest, e.g. aoperations
DNA molecule
by
coordinates
x(t)), of
itsfreedom.
environment
and mutual biological
interactions
reads protein energetics, etc.
number
of degrees
To ycharacterize
motors,
in terms of thermodynamic quantities (work, entropy, etc.), an extension of traditional
H(x, y; (t)) = H(x; (t)) + Henv (y) + Hint (x, y)
thermodynamic concepts
to non-equilibrium processes is has been developed (1.141)
over the last
decade.(t)Theoretical
in this
direction
was
triggered(e.g.,
by the
where
denotes onework
or more
external
control
parameters
thedevelopment
force exerted of
by new
a experimental
[BSLS00]
that make
possible
to probe
the folding
andthe
twisting
tweezer
in a techniques
molecule pulling
experiments,
see itFig.
1.1). The
function
(t) defines
characteristics
of individual DNA molecules with the help of optical tweezers (see Fig. 1.1
20
discussion in this section closely follows that in the Christopher Jarzynski’s review article [Jar11].
forThe
a simple
schematic). These e↵orts led, amongst others, to the discovery of a number
of exact fluctuation theorems (FTs) for non-equilibrium systems, the simplest version of
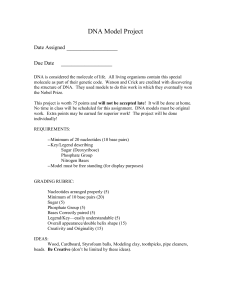
Figure 1.1:
Schematic representation of a 29
molecule pulling experiment (from Ref. [Jar11
which we will discuss below.
The molecule
modeled
by acomprising
collectiontheofsystem
masses
connected
springs.
tweezer ac
Theis
total
Hamiltonian
of interest,
e.g. aby
DNA
moleculeThe
described
on one end
of the molecule,
via anyattached
gold
bead (blue),
by coordinates
x(t)), its e.g.,
environment
and mutual
interactions
reads whereas the other en
is attached to surface.
H(x, y; (t)) = H(x; (t)) + Henv (y) + Hint (x, y)
(1.141)
denotes
one or more
external control
parameters
(e.g.,we
thewill
force
exerted that
by a there
protocol where
of the (t)
control
parameter
variation
and, for
simplicity,
assume
tweezer in a molecule pulling experiments, see Fig. 1.1). The function (t) defines the
only a single
control parameter from now on. For example, for the toy model in Fig. 1
The(z
discussion
section
we have x20=
, pthis
andfollows that in the Christopher Jarzynski’s review article [Jar11].
1 , z2 , z3in
1, p
2 , p3 )closely
Figure 1.1: Schematic representation of a molecule pulling experiment (from Ref. [Jar11]).
The molecule is modeled by a X
collection
of
connected by springs. The tweezer acts
3
2 masses
29
2
X
p
on one end of the
molecule,
gold zbead
(blue), zwhereas
the other(1.14
end
H(x;
(t)) =e.g., viai an+ attached
u(zk+1
k ) + u(
3)
2m k=0
is attached to surface.
i=1
where
u is of
interaction
and
z0 (t) ⌘and,
0 theforposition
of the
The work
protocol
the controlpotential
parameter
variation
simplicity,
we wall.
will assume
that performe
there is
ature of the bath.
characteristics of individual DNA molecules with the help of optical tweezers (see Fig. 1.1
for a simple schematic). These e↵orts led, amongst others, to the discovery of a number
of
exact fluctuation
theorems theorems
(FTs) for non-equilibrium systems, the simplest version of
1.8
Fluctuation
which we will discuss below.
20 The total Hamiltonian comprising the system of interest, e.g. a DNA molecule described
Microbiological systems often perform ‘thermodynamic’ operations with a mesoscopic
by
coordinates
x(t)),ofitsfreedom.
environment
y and mutual
interactions
readsprotein energetics, etc.
number
of degrees
To characterize
biological
motors,
in terms of thermodynamic quantities (work, entropy, etc.), an extension of traditional
H(x, y; to
(t))
= H(x; (t)) +processes
Henv (y) +isHhas
y) developed over
(1.141)
int (x,
thermodynamic concepts
non-equilibrium
been
the last
decade.(t)Theoretical
work
in this
direction
was parameters
triggered by
the the
development
of new
where
denotes one
or more
external
control
(e.g.,
force exerted
by aexperimental
[BSLS00]
that makesee
it Fig.
possible
probe
the folding
and twisting
tweezer
in atechniques
molecule pulling
experiments,
1.1).toThe
function
(t) defines
the
characteristics of individual DNA molecules with the help of optical tweezers (see Fig. 1.1
20
discussion
in this section
closelye↵orts
followsled,
that amongst
in the Christopher
review article
for The
a simple
schematic).
These
others,Jarzynski’s
to the discovery
of a[Jar11].
number
of exact fluctuation theorems (FTs) for non-equilibrium systems, the simplest version of
29
which we will discuss below.
The total Hamiltonian comprising the system of interest, e.g. a DNA molecule described
by coordinates x(t)), its environment y and mutual interactions reads
H(x, y; (t)) = H(x; (t)) + Henv (y) + Hint (x, y)
(1.141)
where (t) denotes one or more external control parameters (e.g., the force exerted by a
tweezer in a molecule pulling experiments, see Fig. 1.1). The function (t) defines the
20
The discussion in this section closely follows that in the Christopher Jarzynski’s review article [Jar11].
29
ature
of the bath.
attached
to
surface.
characteristics of individual DNA molecules with the help of optical tweezers (see Fig. 1.1
ed to surface.
for a simple schematic). These e↵orts led, amongst others, to the discovery of a number
of
exact fluctuation
theorems theorems
(FTs) for non-equilibrium systems, the simplest version of
1.8
Fluctuation
otocol of which
the control
parameter
we will discuss
below. variation and, for simplicity, we will assume that
ofy the
control
parameter
variation
and,
for
simplicity,
we
will
assume
tha
20 control
The
total
Hamiltonian
comprising
the
system
of
interest,
e.g.
a
DNA
molecule
described
a single
parameter
from
now
on.
For
example,
for
the
toy
model
in
Microbiological systems often perform ‘thermodynamic’ operations with a mesoscopic
by
coordinates
x(t)),ofitsfreedom.
environment
y and
mutual
interactions
readsprotein
ngle
parameter
from
on.
For
example,
for
the
toy
model
in
number
of ,degrees
Tonow
characterize
biological
motors,
energetics,
etc.
havecontrol
x=
(z
,
z
z
,
p
,
p
,
p
)
and
1 2 3 1 2 3
in terms of thermodynamic quantities (work, entropy, etc.), an extension of traditional
x = (z1 , thermodynamic
z2 , z3 , p1 , p2concepts
, p3 )y;and
H(x,
(t))
= H(x; (t)) +processes
Henv (y) +isHhas
y) developed over
(1.141)
int (x,
to
non-equilibrium
been
the last
3
2
2direction
X
X
decade.
Theoretical
work
in
this
was parameters
triggered by
the the
development
of new
p
where (t) denotes one or more external
control
(e.g.,
force exerted
by aexi
H(x;
(t))pulling
+2makeseeitu(z
zprobe
+the
u( folding
z3defines
) twisting
3=
perimental
[BSLS00]
thatX
possible
toThe
and
k+1
k ) function
2experiments,
tweezer
in atechniques
moleculeX
Fig.
1.1).
(t)
the
p
2m
i
characteristics of individuali=1
DNA
molecules
with the help of optical tweezers (see Fig. 1.1
k=0
H(x;
(t))
=
+
u(z
z
)
+
u(
z
)
20
k+1
k
3
The
discussion
in
this
section
closely
follows
that
in
the
Christopher
Jarzynski’s
review
article
[Jar11].
for a simple schematic). These
e↵orts
led,
amongst
others,
to
the
discovery
of
a
number
2m
i=1
k=0
of exact fluctuation
theorems
(FTs)
for ⌘
non-equilibrium
systems,
the simplest
versionwork
of
ere u is interaction
potential
and
z0 (t)
0
the
position
of
the
wall.
The
per
29
which we will discuss below.
ring an infinitesimal
parameter
variation
d ofisinterest,
defined
by
The
total
Hamiltonian
comprising
the
system
e.g.
described
s interaction potential and z0 (t) ⌘ 0 the position ofa DNA
the molecule
wall. The
work p
by coordinates x(t)), its environment y and mutual interactions reads
n infinitesimal parameter variation d @H
is defined by
W := d
(x; ).
H(x, y;
(t)) = H(x;
(t)) pulling
+ Henv
(y) + H
int (x,
Figure 1.1: Schematic
representation
of a molecule
experiment
(from
Ref.y)
[Jar11]).
The molecule is modeled by a collection of masses connected by springs. The tweezer acts
on one
end of the
molecule,
e.g., via
an attached
gold bead
(blue), whereas(e.g.,
the other
(t)
denotes
one
or more
external
control
parameters
theendforce
is attached to surface.
@
(1.141)
@H
where
exerted by a
Winitial
:=
d condition
(x;Fig. (0)
).
in a molecule
pulling
experiments,
see
1.1).=The0 function
(t) defines
the ⌧ ,
giventweezer
protocol
(t) with
and final
(⌧ ) =
@
ra
protocol
of the
control parameter
variation and, for simplicity, we will assume that there is
20
rk performed
the
system
The on
discussion
in
this
sectionisclosely
follows that in the Christopher Jarzynski’s review article [Jar11].
only a single control parameter from now on. For example, for the toy model in Fig. 1.1
have with
x = (z , z ,initial
zZ, p , p , p ) and
en protocol we(t)
condition
(0) = 0 and final (⌧ ) =
Z ⌧
29
@H
X p
X
˙ (t)
formed on the system
is (t)) W
W =
=
dt
(t))
H(x;
=
+
u(z
z ) + u(
z (x(t);
)
(1.142)
2m
@
0
1
2
3
1
2
3
3
Z
i=1
Z
2
i
th
⌧,
2
k+1
k
3
k=0
where u is interaction potential and z0⌧(t) ⌘ 0 the position of the wall. The work performed
during an infinitesimal parameter variation d is defined by
@H
˙
ere the integralWis=computed
the (t)
trajectory
x(t) (t))
realized by the system
W =along dt
(x(t);
@H
ing an infinitesimal parameter@ variation d is defined by
For
a given(t)protocol
with initial
(0) = 0 and final (⌧ ) = ⌧ ,
iven
protocol
with initial(t)
condition
(0) = condition
0 and final (⌧ ) = ⌧ , the total
@H
work performed
onis the system
is
erformed
on1.8
the system
Fluctuation
theorems
W := d
(x; ).
@⌧
Z
Z ⌧ Z
Z
20
@Hperform ‘thermodynamic’
Microbiological
systems
often
operations
with a mesoscop
˙
W =
W =W =
dt (t) W =
(x(t); dt
(t))˙ (t) @H (x(t);
(1.144)
(t))
@To
number
of process
degrees
of0 freedom.
characterize
biological
motors,
protein(⌧energetics,
et
a givenRepeat
protocol
(t) with
initial
condition
(0)
=
and
final
) = ⌧ , th
0
and measure
@
0
in
terms
of
thermodynamic
quantities
(work, entropy, etc.), an extension of traditiona
kheperformed
on
the
system
is
integralthermodynamic
is computed along
the trajectory
x(t) realized
by the
system.
concepts
to non-equilibrium
processes
is has
been That
developed over the las
whererealization
the integral
is computed
along
the
trajectory
x(t)
realized
by the syste
a given
W
depends
not
only
on
the
protocol
but
also
on
the
initial
Z
Z
⌧
decade. Theoretical work in this direction was
triggered by the development of new ex
@H
and realization
the
initial state
ydepends
ofthat
the make
environment,
if we
assume
that
is,the
forsystem
a given
W
not
only
on
the
protocol
but
also
on
t
0 of
˙
0
perimental
techniques
[BSLS00]
it
possible
to
probe
the
folding
and
twistin
W =
W =
dt (t)
(x(t); (t))
y)state
> 0 during
the
process.
If
we
repeat
this
process
many
times
forenvironment,
the same
@y 0theof
xcharacteristics
and the
initial
state
theof
if we
0molecules
0 of the system
of individual
DNA
with
help
optical
tweezers (see
Fig.ass
1.
l, we will observe
di↵erent
values of These
work {W
1 , W2 , . . . , } that will be governed by
schematic).
e↵orts
to the discovery
of a numbe
Hint (x,for
y) a>simple
0 during
the process.
If led,
we amongst
repeat others,
this process
many times
for
n probability
density
⇢(W
). FTs
arealong
exact
equalities
and inequalities
for certain
ere
the
integral
is
computed
the
trajectory
x(t)
realized
by
the
system.
of
exact
fluctuation
theorems
(FTs)
for
non-equilibrium
systems,
the
simplest
version
o
protocol,
we
will
observe
di↵erent
values
of
work
{W
,
W
,
.
.
.
,
}
that
will
be
go
1
2
tion valueswhich we will discuss below.
fora acertain
given probability
realization density
WZ depends
theequalities
protocol and
but inequalities
also on thef
⇢(W ).not
FTsonly
are on
exact
total Hamiltonian
comprising
the system
of interest,
e.g. a DNA molecule
describe
te expectation
x0 of theThe
system
and
the
initial
state
y
of
the
environment,
if
we
assum
0
values
hG(W
)i
:=
dW
⇢(W
)
G(W
),
(1.145)
by coordinates x(t)), its environment y and mutual interactions reads
t (x, y) > 0 during the process. If we Zrepeat this process many times for th
H(x, y; (t))
= H(x;
(t)) + {W
Henv1(y)
+2 ,H. int
(x,
y)
(1.141
tocol, we will observe di↵erent
values
of
work
,
W
.
.
,
}
that
will
be
gover
hG(W
)i := dW ⇢(W ) G(W ),
30
ertain probability
density ⇢(W ). FTs are exact equalities and inequalities for
where (t) denotes one or more external control parameters (e.g., the force exerted by
ectation tweezer
values in a molecule pulling experiments, see Fig. 1.1). The function (t) defines th
30 certain G(W)
Z
for
20 FTs = exact (in)equalities
The discussion in this section closely follows that in the Christopher Jarzynski’s review article [Jar11
hG(W )i := dW ⇢(W ) G(W ),
Figure 1.1: Schematic representation of a molecule pulling experiment (from Ref. [Jar11]).
The molecule is modeled by a collection of masses connected by springs. The tweezer acts
on one end of the molecule, e.g., via an attached gold bead (blue), whereas the other end
is attached to surface.
protocol of the control parameter variation and, for simplicity, we will assume that there is
only a single control parameter from now on. For example, for the toy model in Fig. 1.1
we have x = (z1 , z2 , z3 , p1 , p2 , p3 ) and
H(x; (t)) =
3
2
X
X
p2i
+
u(zk+1
2m k=0
i=1
zk ) + u(
z3 )
(1.142)
where u is interaction potential and z0 (t) ⌘ 0 the position of the wall. The work performed
during an infinitesimal parameter variation d is defined by
W := d
@H
(x; ).
@
For a given protocol (t) with initial condition (0) = 0 and final (⌧ ) =
work performed on the system is
Z
Z ⌧
@H
W =
W =
dt ˙ (t)
(x(t); (t))
@
0
(1.143)
⌧,
the total
(1.144)
where the integral is computed along the trajectory x(t) realized by the system. That
is, for a given realization W depends not only on the protocol but also on the initial
state x0 of the system and the initial state y 0 of the environment, if we assume that
Hint (x, y) > 0 during the process. If we repeat this process many times for the same
protocol, we will observe di↵erent values of work {W1 , W2 , . . . , } that will be governed by
a certain probability density ⇢(W ). FTs are exact equalities and inequalities for certain
expectation values
Z
hG(W )i := dW ⇢(W ) G(W ),
(1.145)
30
29
30
t fluctuation theorems (FTs) for non-equilibrium systems, the simplest version
we will discuss below.
Reminder:
Canonical
freee.g.energy
total Hamiltonian
comprising the
system of interest,
a DNA molecule describ
dinates x(t)), its environment y and mutual interactions reads
H(x, y; (t)) = H(x; (t)) + Henv (y) + Hint (x, y)
(1.14
0
(t) denotes one or more external control parameters (e.g., (weak
the force
exerted by
coupling)
in a molecule
experiments,
Fig. 1.1).
function (t).
(t) defines t
that, underpulling
very general
conditions, holdsee
regardless
of exactThe
time dependence
To simplify the subsequent discussion, let us assume that we are able to decouple the
discussionsystem
in this
section
closely follows
thattin
Christopher
article
21
from
the environment
at time
= the
0, and
assume thatJarzynski’s
at time t = review
0 the PDF
of [Jar1
the system state is given by a canonical distribution
291
H(x0 ; 0 )
f (x0 ; 0 , T ) =
exp
,
(1.146a)
Z( 0 , T )
kB T
where T is the initial equilibrium temperature of system and environment at t = 0, and
Z
H(x0 ; 0 )
Z( 0 , T ) = dx0 exp
(1.146b)
kB T
the classical partition function. In this case, the initial free energy of the system is given
by
F0 =
kB T ln Z( 0 , T ).
Moreover, since the dynamics for t > 0 is completely Hamiltonian, we have
(1.147)
f (x0 ;
0, T )
=
exp
,
(1.146a)
Z(
,
T
)
k
T
0
where T is the initial equilibrium temperature
ofBsystem and environment at t = 0, and
and environment at t = 0, and
Z of system
where T is the initial equilibrium temperature
H(x0 ; 0 )
Z
Z( 0 , T ) = dx0 exp
H(x0 ; 0 ) kB T
Z( 0 , T ) = dx0 exp
(1.146b)
kB T
(1.146b
the classical partition function. In this case, the initial free energy of the system is give
the classical partition function. In this case, the initial free energy of the system is given
by
by
Figure 1.1: Schematic representation of a molecule pulling experiment (from Ref. [Jar11]).
The molecule is modeled by a collection of masses connected by springs. The tweezer acts
on one end of the molecule, e.g., via an attached gold bead (blue), whereas the other end
0 B
B 0
0
0
is attached to surface.
F = F k=T lnkZ(T ln
, TZ(
).
, T ).
(1.147)
(1.147
protocol of the control parameter variation and, for simplicity, we will assume that there is
Moreover,since
since
for
>completely
is completely
Moreover,
the
for t from
> now
0 tis
Hamiltonian,
we have we have
onlythe
adynamics
singledynamics
control parameter
on.
For0
example,
for the toy
model in Fig.Hamiltonian,
1.1
we have x = (z , z , z , p , p , p ) and
✓ ✓
◆
◆
X
X
X
X
dH dHH(x; (t)) = @H
@H
@H
p
@H
+ @H
u(z
z ) + u( @H
z)
(1.142)
= =
ż
+
2m ṗi +
i
ṗii +
ż@ti +
dt dt
@p
@z
i
@t
i
where u is interaction potential
and z (t) ⌘ @p
0 the iposition of the@z
wall.i The work performed
✓
◆
✓
◆
i
during an infinitesimalX
parameter variation d is defined by
@H @H✓
@H◆ @H ✓ @H◆˙
X
@H
@H
@H(1.143)+@H
@H ˙
=
+
W := d @H
(x; ).
@
@zi
@zi +@pi
@
=i @pi
+
1
2
3
1
2
3
3
2
2
i
i=1
k+1
k
3
k=0
0
@p
@z
For a given protocol (t) with initial condition i (0) = 0 and final
i (⌧ ) =
work performed on the system is i
Z
Z ⌧
@H
W =
W =
dt ˙ (t)
(x(t); (t))
@
0
=
@H ˙
@H ˙
@
=
@z
, thei total @pi
@
⌧
(1.148)
(1.144)
(1.148
@
and, therefore,
and, therefore,
where the integral is computed along the trajectory x(t) realized by the system. That
is, for a given realization W depends not only on the protocol but also on the initial
state x0 of the system and the initial state y 0 of the environment, if we assume that
Hint (x, y) > ⌧0 during the process. If we ⌧repeat this process many times for the same
protocol, we will observe di↵erent values of work {W1 , W2 , . . . , } that will be governed by
⌧
a certain probability density ⇢(W ). FTs are exact equalities and ⌧inequalities
for certain 0
⌧
expectation0values ⌧
0
Z
⌧(1.145)⌧
hG(W )i := dW ⇢(W ) G(W ),
W =
Z
W =
Z
@H
dt ˙
=
dHZ = H(x ;
Z
@ @H
dt ˙
=
)
H(x ;
dH = H(x ;
)
0)
H(x0 ;
(1.149)
0)
where x(⌧ ) = x⌧ . Now consider
the@expectation
value of the function G(W ) = e
,
0
0
30
which can be expressed as
where x(⌧ ) = x⌧ . Now
Z consider the expectation value of the function G(W ) = e
⌦ W/(k T ) ↵
B expressed as
which ecan be
=
dx0 f (x0 ; 0 , T ) e W/(kB T )
Z Z
⌦ W/(k T ) ↵
[H(x⌧ ; ⌧ )W/(k
H(xB0 T
; )0 )]/(kB T )
B
=
dx
f
(x
;
,
T
)
e
0
0
0
e
=
dx0 f (x0 ; 0 , T ) e
W/(kB T )
(1.149
W/(kB T
i
the integral is computed along
That
@Hthe
˙ trajectory x(t) realized by the system.(1.148)
=
@H ˙ @ not only on the protocol but also on the initial
a given realization W depends
=
(1.148)
of
the
system
and
the
initial
state
y
of
the
environment,
if
we
assume
that
@
and, therefore,
0
0
Z ⌧
Z ⌧
y) > 0 during the process.
If@H
we repeat
this process many times for the same
herefore,
W =
dt ˙
dH{W
= H(x
H(x
)
(1.149)by
0 ; 0will
ol, we will observe di↵erent
values
of= work
that
be governed
1 , W⌧2; , .⌧ .) . , }
@
0
0
Z ⌧ ⇢(W
Zare
⌧ exact equalities and inequalities for certain
in probability density
).
FTs
@H
W/(kB T )
˙
representation of a molecule pulling experiment (from Ref. [Ja
where W
x(⌧=
) = x⌧ . dt
Now consider
value
, (1.149)
= the expectation
dH = H(x
H(x0 ; G(W
⌧ ; of⌧ )the function
0 ) ) = eFigure 1.1: Schematic
ation values
The molecule is modeled by a collection of masses connected by springs. The tweeze
@
0
0
which can be expressed
as
on one end of the molecule, e.g., via an attached gold bead (blue), whereas the oth
Z
is attached to surface.
Z
⌦ W/(k T ) ↵
W/(kB T )
B T )), of the function G(W )(1.145)
hG(W
:=
⇢(W )W/(k
G(W
x(⌧ ) = x⌧ . e NowB consider
the
value
e control
, variation and, for simplicity, we will assume that th
= )i dx
(xdW
protocol=
of the
parameter
0 f expectation
0; 0, T ) e
only a single control parameter from now on. For example, for the toy model in F
Z
can be expressed as
we have x = (z , z , z , p , p , p ) and
[H(x ; ) H(x ; )]/(k T )
dx0 f (x0 ; 0 , T ) e
Z =
X p
X
30
H(x;
(t))
=
+
u(z
z ) + u(
z)
(
⌦ W/(k T ) ↵
BT )
Z
2m
W/(k
B
1 0; 0, T ) e
H(x0 ; 0 )
e
=
dx
f (x
T)
=0
dx0 exp
e [H(x ; ) H(x ; )]/(kwhere
u is interaction potential and z (t) ⌘ 0 the position of the wall. The work perf
Z( 0 , T )
kB T
Z
during an infinitesimal parameter variation d is defined by
Z
1
[H(x
; ⌧ )T )H(x0 ; 0 )]/(kB T )
H(x
; ⌧)/(k
@H
= 0 f (x0 ; 0 ,dx
(1.150)
W := d
(x; ).
(
=
dx
T
)
0 ee
@
Z( 0 , T )
For a given protocol (t) with initial condition (0) =
and final (⌧ ) = , the
Z
21
performed
Similar results hold for
remains coupled work
to the
bath on the system is
1 more complex dynamical models
H(xwhere
) system
0 ; 0the
[H(x⌧ ; ⌧ ) H(x0 ; 0 )]/(kB T )
Z
Z
= process; see discussiondx
exp
e
throughout the
in0Ref.
[Jar11] and references therein.
@H
W =
W =
dt ˙ (t)
(x(t); (t))
(
Z( 0 , T )
kB T
@
Z
where the integral is computed along the trajectory x(t) realized by the system.
1
H(x31
is, for a given realization W depends not only on the protocol but also on the
⌧ ; ⌧ )/(kB T )
=
dx0 e
(1.150)
state x of the system
and the initial state y of the environment, if we assum
Z( 0 , T )
H (x, y) > 0 during the process. If we repeat this process many times for the
1
⌧
⌧
0
0
2
3
1
2
3
B
3
2
2
i
k+1
i=1
⌧
⌧
0
0
k
3
k=0
B
0
⌧
⌧
B
0
⌧
⌧
0
0
0
int
protocol, we will observe di↵erent values of work {W1 , W2 , . . . , } that will be govern
a certain probability density ⇢(W ). FTs are exact equalities and inequalities for c
expectation values
Z
hG(W )i := dW ⇢(W ) G(W ),
(
milar results hold for more complex dynamical models where the system remains coupled to the bath
hout the process; see discussion in Ref. [Jar11] and references therein.
31
30
✓ realized
◆ by the✓system.
◆ That
i
the integral is computed along
trajectory
x(t)
@Hthe
X
˙
@H
@H
@H @H (1.148)@H ˙
=
@H
a given realization W depends
not only on the protocol +
but also on the initial
+ (1.148)
˙@ =
=
@pi environment,
@zi
@zifi we @p
@
i
assume
that
and,system
therefore,and the@ initial state iy 0 of the
0 of the
Z ⌧
Z@H
y) > 0 during the process.
If@H
we repeat
this process many times for the same
⌧
herefore,
˙
W =
dt ˙ =of
= work
dH{W
= H(x
H(x
)
(1.149)by
(1.148)
0 ; 0will
ol, we will observe di↵erent
values
that
be governed
1 , W⌧2; , .⌧ .) . , }
@
0
0
Z ⌧ ⇢(W
Zare
⌧ @exact equalities and inequalities for certain
in probability density
).
FTs
@H
W/(k
)
˙
BT
1.1:
Schematic
representation of a molecule pulling experiment (from Ref. [Ja
where W
x(⌧=
) = x⌧ . dt
Now consider
the expectation
value
of⌧ )the function
G(W
) = eFigure
, (1.149)
=
dH
=
H(x
;
H(x
;
)
⌧
0
0
ationand,
values
therefore,
The molecule is modeled by a collection of masses connected by springs. The tweeze
@
0
0
which can be expressed
as
on one end of the molecule, e.g., via an attached gold bead (blue), whereas the oth
Z
is attached to surface.
Z
Z
Z
⌧
⌧
⌦ W/(k T ) ↵
W/(kB T )
@H )W/(k
B T )), of the function G(W )(1.145)
hG(W
:=
⇢(W
G(W
x(⌧ ) = x⌧ . e NowB consider
the
value
e control
, variation and, for simplicity, we will assume that th
= )i dx
(xdW
protocol=
of the
parameter
0 f expectation
0 ; ˙0 , T ) e
W =
dt
=
dH = H(x⌧ ;
⌧)
H(x ;
)
(1.149)
only a single0control0parameter from now on. For example, for the toy model in F
we have x = (z1 , z2 , z3 , p1 , p2 , p3 ) and
can be expressed as
@
0
0
[H(x ; ) H(x ; )]/(k T )
dx0 f (x0 ; 0 , T ) e
Z =
X p
X
30
H(x;
(t))
=
+
u(z
z ) + u(
z)
(
⌦ W/(k T ) ↵
expectation
Z
2m) = e W/(kB T ) ,
W/(k
T)
B x(⌧ ) = x⌧ . Now
B
where
consider
the
value
of
the
function
G(W
1 0; 0, T ) e
H(x0 ; 0 )
e
=
dx
f (x
T)
=0
dx0 exp
e [H(x ; ) H(x ; )]/(kwhere
u is interaction potential and z (t) ⌘ 0 the position of the wall. The work perf
Z( 0 , Tas
)
kB T
which can be Zexpressed
during an infinitesimal parameter variation d is defined by
Z
1 Z
[H(x
; ⌧ )T )H(x0 ; 0 )]/(kB T )
H(x
; ⌧)/(k
@H
=
dx
(1.150)
W := d
(x; ).
(
=
dx
f
(x
;
,
T
)
0 ee
0
0
0
@
⌦ W/(k T ) ↵ Z( 0, T )
W/(kB T )
B
For a given protocol (t) with initial condition (0) =
and final (⌧ ) = , the
e
=
dx
f
(x
;
,
T
)
e
Z
0
0
0
21
performed
Similar results hold for
remains coupled work
to the
bath on the system is
1 more complex dynamical models
H(xwhere
) system
0 ; 0the
[H(x
;
)
H(x
;
)]/(k
⌧
⌧
0
0
BT )
Z
Z
Zdxin0Ref.exp
= process; see discussion
e
throughout the
[Jar11] and references therein.
@H
W =
W =
dt ˙ (t)
(x(t); (t))
(
Z( 0 , T )
kB T
@
[H(x⌧ ; ⌧ ) H(x0 ; 0 )]/(kB T )
=Z
dx0 f (x0 ; 0 , T ) e
where the integral is computed along the trajectory x(t) realized by the system.
1
H(x31
is, for a given realization W depends not only on the protocol but also on the
⌧ ; ⌧ )/(kB T )
=
dx0 e
(1.150)
Z
state x of the system
and the initial state y of the environment, if we assum
Z( 0 , T )
y) > 0 during the process. If we repeat this process many times for the
1
H(x0 ; 0 ) H (x,[H(x
; ) H(x ; )]/(k T )
Z
⌧
⌧
0
0
B
3
2
2
i
k+1
i=1
⌧
⌧
0
0
k
3
k=0
B
0
⌧
⌧
B
0
⌧
⌧
0
0
=
dx0 exp
=
dx0 e
⌧ observe
⌧
0 values
0 of work
B {W , W , . . . , } that will be govern
we will
di↵erent
eprotocol,
a certain probability density ⇢(W ). FTs are exact equalities and inequalities for c
Z( 0 , T )models where the system
kBremains
T
milar results hold for more complex dynamical
coupled
to the bath
expectation values
Z
Z
hout the process; see discussion in Ref. [Jar11]
and references therein.
1
hG(W )i :=
Z( 0 , T )
H(x⌧ ;
31
21
0
int
⌧ )/(kB T )
1
2
dW ⇢(W ) G(W ),
(1.150)
30
Similar results hold for more complex dynamical models where the system remains coupled to the bath
throughout the process; see discussion in Ref. [Jar11] and references therein.
31
(
= as
dx0 exp
e
which can be expressed
Z( 0 , T )
kB T
Z
Z
⌦ W/(k T ) ↵
1
H(xW/(k
) T)
⌧ ; ⌧ )/(k
B
B TB
=
dx
e
e
=
dx0 f (x0 ; 0 ,0 T ) e
Z( 0 , T )
Z
21
[H(x⌧ ; where
⌧ ) H(x
0 ; system
0 )]/(k
Similar results hold=for more
complex
dynamical
models
the
dx0 f (x0 ; 0 , T ) e
throughout the process; see discussion in Ref. [Jar11] and references therein
Z
1
H(x0 ; 0 )
[H(
=
dx
exp
e
0 this31
Changing the integration variable from
x
!
7
x
,
we
can
write
as
0
⌧
Z( 0 , T )
kB T
Z
Z
1
⌦ W/(k Tvariable
↵
1
@x
Changing the integration
from
x
!
7
x
,
we
can
write
this
as T )
⌧
01
)
; )/(k
e
=
dx⌧ ⌧
e H(x H(x
⌧ ; ⌧ )/(kB T )
Z( 0 , T ) Z
@x0dx
=
e
1 0
Z
⌦ W/(k T ) ↵
11 0 , T ) @x⌧
Z(
; )/(k T )
T)
e
=
dx⌧ H(x ; e)/(kH(x
B
B
⌧
⌧
B
⌧
⌧
B
= Z( 0 , T )
dx⌧ e@x0
Z( 0 , T ) Z
21
1 , T )complexH(x
⌧ ; ⌧ )/(kB T )
Z(
Similar results hold =
for
more
dynamical
models
where
the
syste
⌧
dx
e
⌧
= Z( 0 , T )
(1.151)
Z(
,
T
)
0
throughout the process; see discussion
in Ref. [Jar11] and references therein
Z( ⌧ , T )
(1.151)
Here, we have used Liouville’s= theorem,
which
states
that
the
phase
volume
is
conserved
Z( 0 , T )
under a purely Hamiltonian evolution x0 7! x(⌧ ),
31volume is conserved
Here, we have used Liouville’s theorem, which states that the phase
⌧ x(⌧ ),
under a purely Hamiltonian evolution x@x
0 7!
=1
(1.152)
@x0
@x⌧
=1
(1.152)
Rewriting further
@x0
⇢
⌦
↵
kB T
Z( ⌧ , T )
W/(kB T )
Rewriting efurther
= exp
ln
k
T
Z( 0 , T )
B
⇢
⇢k T
⌦ W/(k T ) ↵
Z( ⌧ , T )
B 1
B
e
= exp
ln
⌧
⌧
B
H(x⌧ ; ⌧ )/(kB T )
Z(
⌦ expressed
↵
⌧, T)
which can be
as
1
@x
=
dx
e
(1.151)
e
==
dx
e⌧
Z(
Z( Z(
, T )0 , 0T,)T ) @x
Z
Z
1
⌦
↵
Z( ⌧ ,which
T )e states that the phase
=
dx
Here, we haveW/(k
usedBLiouville’s
theorem,
volume
T)
W/(k
B T )is conserved
Z(
,
T
)
e
=
dx
f
(x
;
,
T
)
e
0
0
0
under a purely Hamiltonian evolution
x
!
7
x(⌧
),
Z( Z(
, T ) 00, T )
=
(1.151)
Z
Z( , T )
@x⌧
[H(x
; ⌧ ) H(x
=1
(1.152)
⌧phase
0 ; 0 )]/(k
Here, weHere,
have
used
Liouville’s
theorem,
which
states
that
the
volume
is
we have used Liouville’s theorem,
which
that
=
dx
f (x
, T )volume
e is conserved
@x0 0states
0 ;the0phase
under a purely
Hamiltonian evolution
x 7! x(⌧
under a purely
Hamiltonian
evolution
x0),7! x(⌧ ),
Z
Rewriting further
@x 1
H(x
0; 0)
⇢
= 1
(1.152)
@x⌧⌧, T ) dx0 exp
⌦ W/(k T ) ↵
= kB T@x Z(
e [H(
e
= exp
ln 0 , T ) = 1
Z(
k
T
B
k
T
Z(
,
T
)
B
0
@x0 Z
Rewriting further
⇢
⇢
1
1, TB)T ln Z( ⌧ , T ) ( kH(x
⌦
↵
T)
k T
Z([ k
⌧ln; Z(
⌧ )/(k
= exp=
T
)
,
T
)]
B
B
0
dx
e
e
= exp
ln
k
T
0
Rewriting further
B
k T Z(
Z( , T
)
⇢
0, T )
⌧
W/(kB T )
H(x⌧ ;
⌧
0
⌧ )/(kB T )
0
⌧
H(x⌧ ;
⌧ )/(kB T )
0
⌧
0
0
⌧
0
B
W/(kB T )
B
⌧
B
0
⇢ 1 [ kB T ln Z( ⌧ , T ) ( kB T ) ln Z( 0, T )]
Z(
,
T
)
kBkTB T
⌧
21 W/(kB T )
⌦ more
↵
dynamical
models where
the syste
eSimilar results
= hold
exp for
W/(k ln
T complex
)
F/(k T )
e
=
e
(1.153a)
k
T
Z(
,
T
)
one thus finds the FT
B
0
throughout the process; ⇢
see discussion in Ref. [Jar11] and references therein
⌦ W/(k T ) ↵
1 = e F/(k T )
where
e
(1.153a)
= exp
[ kB T ln Z( ⌧ , T ) ( kB T ) ln Z( 0 , T )]
where
F =kB
FT
( ⌧ , T ) F ( 0, T )
(1.153b)
one thus finds the FT= exp
⌦
↵
B
B
B
B
31
= F ( ⌧ , T one
) Fcan
( 0 ,estimate
T)
(1.153b)by measurFT (1.153)
states that, inFprinciple,
free energy di↵erences
one thusThe
finds
the FT
ing
work
W . Instates
this
context,
it should
however
that,di↵erences
in practice,
the exponential
The
FT⌦(1.153)
that, in principle,
onebe
cannoted
estimate
free energy
by measur↵
⌦
↵
W/(k T )
W/(k
)
F/(k
)from
average
is difficult
to sample
asT however
direct
estimators
su↵er
slow convergence.
B
B T the
ing work⌦eW . In this
context,
it should
be
noted
that,
in practice,
exponential
↵
e
=
e
W/(k T )
B
where
B
average
e
is difficult
to sample
as direct estimators su↵er from slow convergence.
Furthermore,
using
Jensen’s
inequality
Furthermore, using Jensen’s inequality
x
hex ihxi ehxi
he i
e
(1.154)
(1.154)
e
= e
ing work⌦ W . In this
context, it should be noted however that,Bin practice, the exponential B
↵
average e W/(kB T ) is difficult to sample as direct estimators su↵er from slow convergence.
Furthermore, using Jensen’s inequality22
Jensen’s inequality
where
22
hex i
ehxi
(1.154)
Jensens’s inequality states that, if (x) is convex then
E[ (X)]
F = F(
(E[X])
⌧, T)
F ( 0, T )
Proof: Let L(x) = a + bx be a line, tangent to (x) at the point x⇤ = E[X]. Since
(x) L(x). Hence
E[ (X)] E[L(X)] = a + bE[X] = L(E[X]) = (E[X])
is convex, we have
The FT (1.153) states that, in principle, one can estimate fr
ing work⌦ W . In this
context,
it
should
be
noted
however
t
↵
W/(kB T )
average e
is difficult to sample as direct estimato
32
Furthermore, using Jensen’s inequality
x
he i
e
hxi
we find
e
source: Wiki
F/(kB T )
⌦
= e
W/(kB
↵
T)
e
h W/(
Rewriting further
=
↵
=
e W/(kB T ) =
one thus finds the FT
one thus finds the FT
=
⌦
one
thus finds the FT
where
where
Z( 0 , T )
⇢k T
⇢ B 1
exp⇢ k T1 [ Z(
kB T ,ln
Z(
( kB T ) ln Z( 0 , T )]
⌧, T)
T
)
exp
[
k
T
ln
Z(
,
T
)
( kB T ) ln Z( 0 , T )]
BkB T
B ⌧
⌧
exp
ln
k T
kB TB
Z( 0 , T )
⇢
1
exp ⌦ W/(k[ T )k↵B T ln Z( ⌧F/(k
, T ) T ) ( kB T ) ln Z( 0 , T )]
B
k
T
⌦ e W/(k
↵ = e F/(kB T )
B
(1.153a)
BT )
B
e
= e
(1.153a)
⌦ W/(k T ) ↵
BT )
e = F B( ⌧ , T )= Fe ( 0F/(k
(1.153a)
F
,T)
(1.153b)
F = F ( ⌧ , T ) F ( 0, T )
(1.153b)
where
The FT (1.153) states that, in principle, one can estimate free energy di↵erences by measurThe
(1.153)
that, in principle,
onenoted
can estimate
di↵erences
by measuringFT
work
. Instates
this
context,
it should be
however free
that,energy
in practice,
the exponential
⌦ WW/(k
↵
F sample
= F (be⌧ as
,noted
T direct
) Fhowever
(estimators
(1.153b)
0 , T ) that,
B T ) context, it should
ing
work⌦ We . In this
in practice,
theconvergence.
exponential
average
is difficult to
su↵er
from slow
↵
average
e W/(kB T )using
is difficult
to inequality
sample as direct estimators su↵er from slow convergence.
Furthermore,
Jensen’s
The FT (1.153) states that, in principle, one can estimate free energy di↵erences by measurFurthermore, using Jensen’s inequality
x noted
hxihowever that, in practice, the exponential
ing work⌦ W . In this
context, it shouldhebe
i
e
(1.154)
↵
W/(kB T )
average e
is difficult to sample
hex ias direct
ehxi estimators su↵er from slow convergence.
(1.154)
using Jensen’s inequality
weFurthermore,
find
we find
⌦ xW/(k Thxi) ↵
F/(kB T )
(1.154)
e
= ⌦he
e i Be ↵ eh W/(kB T )i
e F/(kB T ) = e W/(kB T )
eh W/(kB T )i
which
we
find is equivalent to the Clausius inequality
⌦ W/(k T ) ↵
which is equivalent to the Clausius
inequality
F/(kB T )
B
i, eh W/(kB T )i
(1.155)
e
= e F hW
F hW i,
(1.155)
i.e.,
the
average
work
provides
an
upper
bound
for
the
free
energy
di↵erence.
which is equivalent to the Clausius inequality
i.e., the average work provides an upper bound for the free energy di↵erence.
F hW
(1.155)
32 i,
32 for the free energy di↵erence.
i.e., the average work provides an upper bound
32
which is equivalent to the Clausius inequality
F hW i,
i.e., the average work provides an upper bound for the free energy di↵erence.
Finally, we still note that
Z F ✏
P[W < F ✏] :=
dW ⇢(W )
1
Z F ✏
dW ⇢(W ) e( F ✏ W )/(kB T )
1
Z 1
e( F ✏)/(kB T )
dW ⇢(W ) e W/(kB T )
1
⌦
↵
( F ✏)/(kB T )
W/(kB T )
= e
e
= e
✏/(kB T )
(1.155)
(1.156)
That is, the probability that a certain realization W violates the Clausius relation by an
amount ✏ is exponentially small.