Understanding data assimilation: how observations and a model are Tomoko Matsuo
advertisement

Understanding data assimilation:
how observations and a model are
weaved into the analysis via statistics
Tomoko Matsuo
NCAR
Thanks: Doug Nychka, Jeff Anderson,
Kevin Raeder, Alain Caya, Art Richmond, Gang Lu …
What is data assimilation?!
Combining Information
prior knowledge of the state of system
empirical or physical models (e.g. physical laws)
complete in space and time
x
observations
directly measured or retrieved quantities
yo
incomplete in space and time
Bayes Theorem
“Bayesian statistics provides a coherent
probabilistic framework for most DA approaches” [e.g., Lorenc, 1986]
prior knowledge
P((xx) ~ N ( xf , Pf )
x = xf + εf
observations P( y | x) ~ N ( H ( x), R )
yo = H ( x ) + ε o
o
Note: observations y conditioned upon the state x
posterior
P ( x | y o ) ∝ P ( yo | x ) P ( x )
PP((xx|| yyoo))~~ NN((xxaa ,,PPaa))
H is linear
where xa = xf + K ( y − Hxf )
Pa = (I − KH )Pf
Assumption: Normal Distribution
Importance of Covariance
prior
observations
[e.g. Rodgers, 2000]
P( x) ~ N ( xf , Pf )
P( yo | x) ~ N (Hx, R )
update
posterior
P ( x | yo )
xf = (2.3 2.5)
⎛ 0.225 0.05 ⎞
⎟⎟
Pf = ⎜⎜
⎝ 0.05 0.15 ⎠
H = (1 0 )
x1 : observed
x2 : unobserved
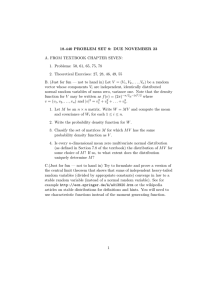
Assimilative Mapping of Ionospheric Electrodynamics
[Richmond and Kamide, 1988]
xa = xb + K ( y − Hxb )
prior knowledge
[Foster et at., 1986]
observations
[Lu et al., 1998]
Inhomogeneous / anisotropic covariance
Adaptive Covariance Estimation Using Maximum likelihood Method
[Dee 1995; Dee and da Saliva 1999]
xa = xb + K ( y − Hxb )
K = Pb (α ) HT HPb (α )HT
observations
[
+R
[Matsuo et at., 2002; 2005]
]
−1
Use of Dynamics
xt +1 = M ( xt )
M
P( xt | Py(t −x1t ,...)
)
P ( xt P
+1( x| ty+t1, |y ty−t1),...)
P
(
x
P
|
(
y
x
,
|
y
y
)
,...)
t
t tt−1
forecast
P( y t | xt ) update
P( yt +1 | xt +1 )
xa , t
xf , t +1
M
Assumption: linear dynamics
Pa , t
Pf , t +1
Ensemble Kalman FIlter
Let’s work with samples!
Challenge posed by
the size of the covariance
matrix (1012 –1016)
Issues with sampling error
[e.g., Furrer and Bengtsson, 2005 ]
spurious correlations in the area of large lag distance.
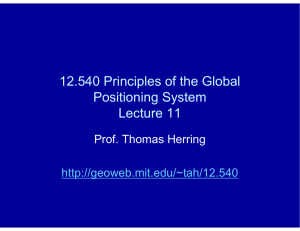
EnKF v.s.
3D-Var comparisons
[Caya et al., 2005]
Temperature
Increments
xa = x f + K ( y − H x f )
(T-obs at 850 hPa, initial time)
EnKF
With Localization
3D-Var
Issue with sampling error: covariance localization (tapering)
is necessary to remove spurious correlations in the area far
from observation location.
Summary
• Bayesian statistics as an overarching framework.
• By confronting a model with observations via
first/second moment statistics, data assimilation
– improves the state estimation.
– provides a means to evaluate the quality of the model and
the value of observations.
• Inhomogeneous and anisotropic covariance.
• Ensemble Kalman Filter does not require
linearization of forward operator (H) and model (M),
and has an advantage in capturing flow-dependent
covariance structure.
– See http://www.image.ucar.edu/DAReS/DART
Challenges and Future
• Observation is still sparse... (blessing?!)
• Dissipative system and strongly forced
system in comparison with meteorological and
oceanic systems.
(forcing prediction is key to forecasting)
• Observing system design analysis or adaptive
observation [e.g., Bishop et al., 2001]. (feedback
to the design of observational campaigns )
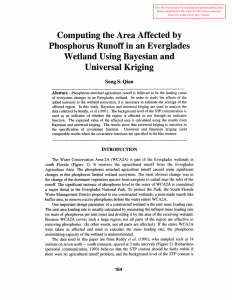
Why is data assimilation in a data
sparse region challenging?
Large Correlation Distance
Inhomogeneous & Anisotropic
Autocorrelation
function
1000km
6000km
Correlation Distance i-j [Km]
Adaptive covariance estimation using
maximum likelihood method
OI analysis: optimal estimation of α
α a = K OI y ' , where y ' = y o − H (xb)
T
T
K ΟΙ = [(EOF ) R −1EOF + Pb−1 ]−1 (EOF ) R −1
Background error covariance:
Pb = α⋅ α T
( )
≈ diag Pb νν ≈ ζ 1ν
− ζζ22
Observational error covariance:
R ≈ diag(R ) ≈ f (ζ 33 , ζζ44 )
ν = 1, …,11
Maximum-likelihood method: optimal estimation of ζ
Innovation covariance:
[Dee 1995; Dee and da Silva, 1999]
< y ' ⋅ y 'T > = R + EOF Pb (EOF ) T ≈ S( ζζ
Cost function:
) {ζ k | k = 1 → 4}
J ( ζ ) = log det S( ζζ ) + y ' S −1 ( ζ ) y '
T