Investigations into the Robustness of
Computer-Synthesized Congestion Control
by
Pratiksha Ranjit Thaker
S.B., Massachusetts Institute of Technology (2014)
Submitted to the Department of Electrical Engineering and Computer
Science
in partial fulfillment of the requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2015
c Massachusetts Institute of Technology 2015. All rights reserved.
Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Department of Electrical Engineering and Computer Science
May 22, 2015
Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hari Balakrishnan
Fujitsu Professor
Thesis Supervisor
Accepted by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Prof. Albert R. Meyer
Chairman, Masters of Engineering Thesis Committee
2
Investigations into the Robustness of Computer-Synthesized
Congestion Control
by
Pratiksha Ranjit Thaker
Submitted to the Department of Electrical Engineering and Computer Science
on May 22, 2015, in partial fulfillment of the
requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
Abstract
Recent work has shown that computer-synthesized TCP congestion control protocols
can outperform the state of the art. However, these protocols are generally too complex
to reason about. Human engineers therefore might not trust them enough to deploy
them in real networks.
This thesis presents two contributions toward the practical deployment of computersynthesized congestion-control algorithms. First, we describe a simple, human-designed
protocol that performs comparably to computer-optimized protocols using only 10 lines
of code, suggesting that it may be feasible to optimize for interpretability in addition
to performance. Second, we introduce techniques for reasoning about the behavior
of black-box protocols via extensive simulation, which reveal regions of potentially
undesirable behavior in both computer-optimized protocols and a NewReno-like TCP
implementation, highlighting areas to focus further engineering effort.
Thesis Supervisor: Hari Balakrishnan
Title: Fujitsu Professor
3
4
Acknowledgements
I am lucky to have had Hari Balakrishnan as both a class professor and a research
advisor. His enthusiasm and energy are likely to convince anyone that networking
research is a worthwhile pursuit; they certainly convinced me.
Keith Winstein was fortunately working on Remy at around the same time that I was
looking for projects like Remy. I have learned a great deal from his unique perspective
and approach to research.
Anirudh Sivaraman has provided invaluable guidance, moral and technical support,
and many colorful stories.
The ideas in this thesis have benefited from discussions with many people, including Hamsa Balakrishnan, Leslie Kaelbling, Russ Tedrake, Gustavo Goretkin, and Jacob
Steinhardt.
The experiments in this thesis were made possible by the PDOS group’s generosity
in sharing the use of their multicore machines.
Thanks to Sheila Marian for her tireless logistical support.
I owe a great deal to Stefanie Tellex, who taught me all the things I didn’t learn in
class, and trusted that I could do things I didn’t know I was capable of doing.
I am so glad to have spent this year in NMS and on G9, where I have found better
labmates and floor-mates than I could have hoped for.
My friends at and outside MIT have made countless late nights (and early mornings)
all worthwhile.
And finally, I am thankful to my family, near and far, for their love and support: especially my parents, who have given me more than words can express; and my brother,
who I am so very grateful to have in my life.
This work was supported by a Google research award.
5
6
Contents
1 Introduction
13
1.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Related work
14
17
2.1 TCP congestion control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.2 Remy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.3 Safety analysis of congestion-control protocols . . . . . . . . . . . . . . . .
19
3 The Kite protocol
21
3.1 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.1.1 Congestion signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.1.2 Windowing and pacing . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.1.3 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.2 Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
4 Toward automated verification of congestion control
31
4.1 Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
4.1.1 Cycle detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
4.1.2 Network state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
4.2 Single sender . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
7
4.2.1 Sensitivity to initial conditions . . . . . . . . . . . . . . . . . . . . .
36
4.2.2 Convergence time . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.3 Multiple senders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.3.1 A sender joins the network . . . . . . . . . . . . . . . . . . . . . . . .
41
4.3.2 A sender leaves the network . . . . . . . . . . . . . . . . . . . . . . .
43
4.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
5 Future work and conclusions
49
8
List of Figures
3-1 Performance of Kite over a range of link speeds. . . . . . . . . . . . . . . .
27
3-2 Performance of Kite over a range of RTTs. . . . . . . . . . . . . . . . . . . .
28
3-3 Performance of Kite over a range of multiplexing. . . . . . . . . . . . . . .
29
4-1 Throughput maps generated by sweeping a range of initial conditions
for a single sender running one of two Remy-generated protocols. An
omniscient sender would achieve 100% throughput (white). . . . . . . .
38
4-2 Cycle convergence times for a one-sender system in a single-bottleneck
network with a 150 ms round-trip time. . . . . . . . . . . . . . . . . . . . .
40
4-3 Cycle convergence times for a two-sender system in a single-bottleneck
network with a 32 Mbits/s link and 150 ms round-trip time. The x-axis
indicates the time at which a second sender joins the network (starting
at time 0 when the first sender starts, until the first sender reaches a
cycle). The y-axis indicates the amount of time from when the second
sender starts until the entire network state enters a cycle. While a system
of two RemyCCs converges to a cycle within under 35 seconds regardless
of when the second sender turns on, a system of AIMD senders can take
up to 2000 seconds to converge for the same network parameters. . . . .
9
42
4-4 Time required for a single sender to return to a cycle after a second
sender has entered and left the network, in a network of RemyCCs
trained for link speeds between 1 and 1000 Mbits/s. The x-axis specifies
the period of time for which the second sender turns on before turning
off again. The y-axis shows the number of milliseconds required for the
first sender to return to a cycle. The convergence time for the first sender
increases systematically the longer the second sender is on, except when
the second sender’s flow duration is short (under one second). . . . . . .
45
4-5 Variation in cycle trajectories in one variable of the state of a two-sender
system of RemyCCs. The trajectories vary significantly and must be analyzed separately. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
46
List of Tables
3.1 Training and evaluation scenarios for breadth in link speed. . . . . . . . .
24
3.2 Training and evaluation scenarios for breadth in multiplexing. . . . . . .
25
3.3 Training and evaluation scenarios for breadth in propagation delay. . . .
25
11
12
Chapter 1
Introduction
A computer that wants to send data over a network – an endpoint – must answer a
difficult question: knowing almost nothing about the state of the network, when is the
best time to send this data, and how quickly? Endpoints in the Internet use congestioncontrol protocols to make these decisions. The inputs to these protocols are various
signals of network state; the outputs are modifications to the sender’s current rules for
sending packets.
Traditional approaches to designing congestion-control protocols are reactive: once
a protocol is deployed in a network, unexpected deficiencies in performance might
surface; as a result, a researcher might propose a new protocol to resolve those deficiencies. Yet the myriad congestion-control schemes that have arisen from this cycle
are not well-understood. Which scheme should an endpoint use if it is running a videoconference application, and its packets cannot suffer long delays? Which should it use
for a large file transfer across continents, where throughput is paramount? Various
protocols claim to cater to these objectives, but support for these claims is often based
on intuition and limited experimentation.
Remy [28] is a tool that synthesizes congestion-control protocols according to a
user-specified objective function, under certain assumptions about the network condi13
tions in which the protocol is intended to operate. The experiments in [23] demonstrate that the protocols Remy produces perform well – in fact, they outperform existing protocols such as TCP Cubic [11] and even protocols that require modifications
to routers in the network, such as CoDel [20], on certain objective functions. However, the protocols that Remy generates are extremely complex, with hundreds of rules
that prevent human network engineers from developing an intuition for its behavior.
The complexity of Remy-generated protocols – “RemyCCs” – is a barrier to their deployment. In particular, while a protocol such as TCP New Reno [12] might have
unexpected emergent behavior, the algorithms that produce this behavior at endpoints
are simple enough that it might be possible for a researcher or engineer to reason about
the unexpected behavior and develop a solution for it. A comparable situation arising
from the use of a RemyCC might be impossible to fix without – or even with – expert
knowledge of the optimization procedure.
This suggests that there are two avenues for gaining enough trust in the behavior
of a RemyCC to deploy it in practice: develop RemyCCs that are simple enough at
the endpoints that humans can reason about and fix unexpectedly poor behavior, or
develop tools for verifying the safety of black-box protocols so that we might convince
ourselves that emergent problems will not arise at all.
1.1
Contributions
This thesis presents two main contributions:
1. The design and evaluation of a simple congestion-control protocol, Kite, a proofof-concept that demonstrates that good performance need not necessarily come
at the cost of increased protocol complexity (Chapter 3). Our evaluation shows
that Kite can achieve performance comparable to Remy-designed protocols on
broad operating ranges using only 10 lines of code, compared to the hundreds of
14
rules that Remy optimizes.
2. Preliminary steps toward a verification tool to automatically assess the safety and
performance of black-box congestion-control protocols (Chapter 4). We develop
a framework in which to reason about the long-term performance and safety of
congestion-control protocols by extensive, fine-grained simulation. By identifying
cycles in the state of the entire network over the course of execution, we can
study the robustness of protocols to variation in initial conditions as well as to
flow arrivals and departures at arbitrary times. Our analysis reveals potentially
undesirable behavior in both RemyCCs and a NewReno-like TCP implementation
that merits further investigation.
15
16
Chapter 2
Related work
2.1
TCP congestion control
Congestion control for TCP is an area with a rich literature, starting with Ramakrishnan
and Jain’s DECbit scheme [22] and Jacobson’s TCP Tahoe and Reno [14] in the 1980s,
and continuing to the present.
“End-to-end” congestion control attempts to use only information available at the
endpoints – such as suspected packet losses or packet round-trip times – to make decisions about sending packets. Most TCP congestion-control protocols control packetsending behavior by moderating a congestion window, which determines the maximum
number of packets the connection may have outstanding at a given moment.
The primary differentiators among end-to-end protocols are the statistic used to
measure congestion and the rules for modifying the window on a congestion event.
Many TCP variants use packet loss as a congestion signal, such as NewReno [12],
BIC [29] and Cubic [11], and Datacenter TCP (DCTCP) [1]. However, recent work
[10] has suggested that the presence of deep, “bloated” buffers in the Internet renders
packet loss an ineffective signal, and that packets will accumulate long delays if senders
wait for a loss event before reducing their congestion window. Other protocols use
17
increasing packet delay as a signal of congestion, such as Vegas [4], FAST TCP [27], and
Compound TCP [25]. These delay-based protocols are the subject of some debate due
to their dependence on accurate round-trip time measurements, which may make their
performance sensitive to changes in the network; furthermore, their sensitivity to high
latency might cause them to suffer in the face of existing loss-based TCP mechanisms
[18].
“In-network” congestion control algorithms attempt to provide the endpoints with
more information about the network state so that they can make better decisions to
avoid congestion through router participation. These schemes use techniques such as
using acknowledgements to notify endpoints of congestion [8, 15], managing delay in
queues by dropping packets before they fill the buffer [9, 20, 17, 6, 21], or explicitly
setting a rate at which endpoints should send data [24].
2.2
Remy
Remy [28] is a tool for synthesizing congestion-control protocols. It takes as input a
model of the network and a particular objective function to optimize, and uses extensive simulation of the provided network parameters to synthesize a protocol according
to the given objective function. A network model might include a range of link speeds
for the bottleneck link, an estimate of the degree of multiplexing in the network, the
expected round-trip propagation delay, and the buffer sizes at the routers, with some
tolerance for uncertainty in all of these parameters. While an objective function could
take many forms, existing evaluations of Remy consider objective functions of the form
log(throughput) − δ log(delay),
where δ is a factor that trades off the relative importance of throughput and delay. That
is, a δ value of zero would indicate that the objective is to maximize throughput; a δ
18
value of one places equal importance on throughput and delay. Remy maps the space
of congestion signals – measured statistics such as packet delays and acknowledgement
interarrival times – to congestion window and rate update rules.
Sivaraman et al. in [23] explore the capabilities and limitations of Remy-designed
protocols optimized over large parameter ranges for an objective function that places
equal importance on delay and throughput. This work indicates that Remy can synthesize protocols that perform well even when provided only limited prior knowledge
about the network, or when the network is heterogeneous (that is, senders have different, and even competing, objectives).
2.3
Safety analysis of congestion-control protocols
A primary concern when deploying a new network protocol is whether it has the potential to cause unexpected and catastrophic behavior. This concern often stems from
the spectre of congestion collapse [19], in which network throughput dramatically
decreases as a result of poor behavior at the endpoints, such as excessive packet retransmissions.
Traditional approaches to analyzing the safety of a congestion-control protocol involve constructing a continuous-time model of the protocol that is amenable to techniques from control theory. For instance, Kelly in [16] uses such a model to analyze the
rate fairness of TCP; Alizadeh et al. in [2] use a limit cycle analysis to study throughput, delay, and convergence properties of DCTCP [1]. Similar analyses have also been
published for in-network congestion-control schemes, such as XCP [15, 3], and activequeue-management schemes [13]. These techniques are generally focused on analyzing the behavior of an aggregate of flows on a particular network topology. For these
protocols, a stability analysis is also useful for identifying safe values of free parameters
(such as a multiplicative decrease factor) when tuning the protocol for deployment.
19
At a more fine-grained level, Veres et al. [26] have used simulations to demonstrate that TCP exhibits chaotic behavior when subjected to small perturbations of the
congestion window.
20
Chapter 3
The Kite protocol
Remy [28] produces congestion-control protocols that perform well on certain objective functions, but are extremely complex, with hundreds of rules determining the
behavior of each endpoint. The complexity of a Remy-optimized protocol (“RemyCC”)
presents a barrier to deployment; while some may find that a RemyCC’s performance
is sufficient to convince them to run it on their computers, others are likely to object
that they cannot trust the behavior of a black-box protocol.
It may well be the case that a protocol that performs well in a diverse Internet
with many competing objectives must be very complex, and if this were true, we might
sacrifice our understanding of the protocols we run in favor of good performance on
the objectives of our choosing. However, if we were able to optimize simpler protocols
with comparable performance, we may not need to resign ourselves to using black-box
algorithms.
In this chapter, we discuss a human-designed protocol, Kite, which attempts to
perform as well as RemyCCs optimized for the objective function
log (throughput) − log (delay)
on broad ranges of network parameters.
21
3.1
Design
Kite replaces the window and pacing update rules in a RemyCC, but maintains the same
state variables. Algorithm 1 gives pseudocode for the update rules, executed on every
ACK arrival at the sender. Kite’s design is informed by the rule tables of the RemyCCs
in [23]; although it ultimately uses fewer congestion signals, and its update rules are
structured differently, some investigation into the behavior of these RemyCCs provided
inspiration for the design described here.
3.1.1
Congestion signals
Kite uses two of the congestion signals used by Remy [28]:
1. An exponentially-weighted moving average over the interarrival times between
acknowledgements (with a weight of 1/8 placed on new samples).
2. The ratio between the most recent RTT and the minimum RTT seen during the
current connection.
In addition to these two signals, Remy uses an exponentially-weighted moving average
over the time between TCP sender timestamps reflected in packet acknowledgements,
but Kite seems to perform reasonably well without this signal. Furthermore, [23] introduces a fourth congestion signal (the same exponentially-weighted moving average
of ACK interarrival times, averaged over more samples) in order to perform well over
a large range of link speeds, but Kite does not use this signal and achieves higher performance on the same range. This suggests that this “slow” EWMA of ACK interarrival
times might be necessary only as an artifact of an inefficient optimization procedure.
22
3.1.2
Windowing and pacing
Remy uses both windowing and pacing in its algorithms, optimizing window increase
and decrease rules as well as sending rates. In contrast, Kite incrementally opens its
window but, once open, never closes the window again, effectively using the window
to regulate sending only in the first few RTTs. However, this conservative increase
appears to be particularly important in order for Kite to perform well at both very low
and very high link speeds; without it, Kite would be either too aggressive at low link
speeds or not aggressive enough for high link speeds.
We are cautious about drawing general conclusions about the benefits of windowing and pacing from these observations. More complex windowing rules might provide
benefits in the form of increased performance at high degrees of multiplexing or robustness to noise in the network. In practice, accurate, fine-grained pacing may not be
feasible at very high link speeds; we have not explored the sensitivity of Kite’s performance to jitter in the network. Conservatively, this observation indicates that for the
objective and parameters that Kite operates in, it may be sufficient to optimize pacing
rules alone, or coarser-grained windowing rules.
3.1.3
Algorithm
Kite follows two intuitive rules:
• use the RTT ratio estimate to reduce standing queues, and
• use the ACK interarrival times to estimate the available capacity in the network
and send accordingly.
Line 8 and line 10 increase the sending rate when queueing is estimated to be
sufficiently low. Lines 7 through 11 ensure that the sending rate does not increase too
quickly when available capacity is small (i.e., when ACKs are arriving slowly).
23
Algorithm 1 Kite
1: initialize cwnd
= 15
2: initialize intersend_time
= 0.5 ms
3:
4: on each ACK do
5: if rtt_ratio ≤ 1.01 then
6:
7:
8:
9:
10:
11:
12:
13:
14:
cwnd += 1
if ack_ewma > 1 ms then
intersend_time = ack_ewma / (ack_ewma / 10 + 1)
else
intersend_time = ack_ewma / (ack_ewma + 1)
end if
else
intersend_time = ack_ewma × 1.1
end if
. Slower link speed
. Faster link speed
The constants in this algorithm, including the initialization defaults, are tuned
roughly for performance; we do not claim that they are correct or optimal for practical scenarios. In particular, they are tuned for performance on the network parameter
ranges described in Section 3.2.
3.2
Evaluation
Link speeds
1–1000 Mbps
22–44 Mbps
RTT
150 ms
150 ms
On avg.
1 sec
1 sec
Off avg.
1 sec
1 sec
# senders
2
2
(a) Training ranges for RemyCCs designed for breadth in link speed.
Link speeds
1–1000 Mbps
RTT
150 ms
# senders
2
(b) Testing scenario to explore breadth in link speed.
Table 3.1: Training and evaluation scenarios for breadth in link speed.
We evaluate Kite on a number of network parameter ranges explored in [23] against
the same RemyCCs evaluated in that paper, as well as with two common schemes in
24
Link speeds
15 Mbps
15 Mbps
On avg.
1 sec
1 sec
Off avg.
1 sec
1 sec
min-RTT
150 ms
150 ms
# senders
2
100
(a) Training ranges for RemyCCs designed for breadth in multiplexing.
Link speeds
15 Mbps
15 Mbps
On avg.
1 sec
1 sec
Off avg.
1 sec
1 sec
min-RTT
150 ms
150 ms
# senders
1–100
1–100
Buffer
5 BDP
No drops
(b) Testing scenarios to explore breadth in multiplexing
Table 3.2: Training and evaluation scenarios for breadth in multiplexing.
Link speeds
33 Mbps
33 Mbps
On avg.
1 sec
1 sec
Off avg.
1 sec
1 sec
min-RTT
150 ms
50–250 ms
# senders
2
2
(a) Training ranges for RemyCCs designed for breadth in propagation delay.
Link speeds
33 Mbps
On avg.
1 sec
Off avg.
1 sec
min-RTT
1, 2, 3 . . . 300 ms
# senders
2
(b) Testing scenario to explore breadth in propagation delay.
Table 3.3: Training and evaluation scenarios for breadth in propagation delay.
wide use today:
1. TCP Cubic [11], the default congestion-control protocol in Linux, and
2. Cubic over CoDel with stochastic fair queueing [20], an active-queue-management
and scheduling algorithm that runs on bottleneck routers and assists endpoints
in achieving a fairer and more efficient use of network resources.
We evaluate each protocol on a dumbbell network topology with one bottleneck
link. In each evaluation, senders turn on for a period of time drawn from an exponential distribution with mean 1 second, and turn off for a period of time drawn from
the same distribution before turning on again. Queues in the network are first-in,
25
first-out (FIFO) queues except for evaluations using Cubic-over-sfqCoDel, which runs
CoDel with stochastic fair queueing. Unless specified otherwise, buffers are sized at 5
times the bandwidth-delay product of the network (the network link speed times the
minimum round-trip time).
The evaluations are performed in the ns-2 simulator. For brevity, we evaluate only
against the RemyCCs trained for either the low or high extreme of breadth in a particular network parameter.
In all cases, the objective function evaluated is
log (throughput) − log (delay).
The network is homogeneous; that is, all endpoints in each experiment run the same
algorithm. In each evaluation result we also include the results for a hypothetical omniscient protocol, which has perfect knowledge of the network and can therefore give
each sender its fair-share allocation of the link bandwidth while incurring no queueing
delay.
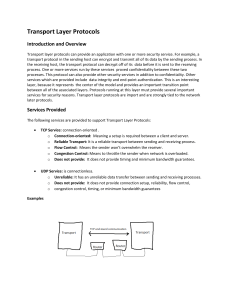
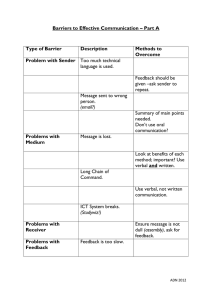
Figure 3-1 shows results for protocols tested over a broad range of link speeds (Table 3.1b). Kite outperforms a RemyCC trained for a thousand-fold range of link speeds
over almost the entire testing range. It does not achieve performance comparable to a
RemyCC trained for a two-fold range of link speeds within its own training range, but
far outperforms it outside that range (as does the thousand-fold RemyCC).
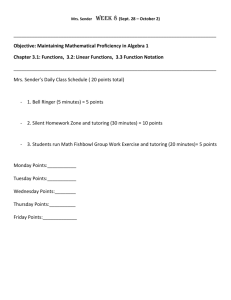
Figure 3-2 shows results for protocols tested on a range of round-trip times (Table 3.3b). Although Kite does not achieve quite the same level of performance as a
RemyCC trained for a large range of RTTs, it comes close, and maintains consistency in
performance across all but the very lowest RTT values.
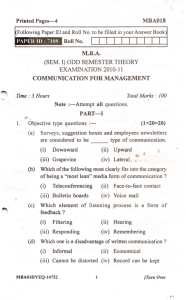
Figure 3-3 shows results for protocols tested for variation in the number of senders
contending for the network (Table 3.2b) – both with a buffer size of 5 times the
26
0.0
Normalized objective function
−0.5
Protocol
Cubic
Cubic−over−sfqCoDel
Kite
−1.0
Omniscient
RemyCC (1000x)
RemyCC (2x)
−1.5
−2.0
1
10
100
1000
Link speed (Mbits/s)
Figure 3-1: Performance of Kite over a range of link speeds.
bandwidth-delay product (Figure 3-3a), and with a large enough buffer that no packets
are dropped (Figure 3-3b). Figure 3-3 shows that while Kite does not achieve utility
as high as some RemyCC for a particular number of senders, it has better breadth; that
is, it performs better at small numbers of senders than a RemyCC trained for a large
number of senders, and performs better at large numbers of senders than a RemyCC
trained for a small number of senders.
3.3
Discussion
While we do not make claims about the general utility or robustness of this protocol, it
provides a counterpoint to the discussion in [28] that we may be resigned to increased
complexity at endpoints if we wish to design protocols with predictable aggregate behavior for specific objective functions. Kite requires about 10 lines of code to perform
well on an objective function for which Remy generates a protocol with hundreds of
27
0.0
Normalized objective function
−0.5
Protocol
Cubic
Cubic−over−sfqCoDel
Kite
−1.0
Omniscient
RemyCC (150 ms exactly)
RemyCC (50−250 ms)
−1.5
−2.0
100
200
300
RTT (ms)
Figure 3-2: Performance of Kite over a range of RTTs.
rules. This suggests that there is promise for new protocol synthesis tools that generate interpretable protocols without sacrificing performance, smoothing the path for
acceptance of computer-generated protocols by the networking community. Such a
tool might additionally provide a framework in which to rigorously evaluate tradeoffs
among interpretability, performance, and robustness.
These results also suggest that there may be hope for a “one-size-fits-all” protocol
that performs well on wide ranges of several network parameters at once, at least on
certain objectives. (A more intelligent protocol might also try to infer when an objective
is infeasible to achieve, and act according to a “next-best” alternative, as in the case of
a latency-sensitive protocol competing with a buffer-filling TCP variant).
It is also worth noting that each RemyCC in the evaluation was trained for breadth
in only one network parameter, and given perfect knowledge of all other parameters.
It may be possible to optimize a RemyCC for breadth in all three parameters (link
speed, round-trip time, and number of senders), but, given the large space of training
28
Normalized objective function
0.0
Protocol
−0.5
Cubic
Cubic−over−sfqCoDel
Kite
Omniscient
RemyCC (1−100 senders)
RemyCC (1−2 senders)
−1.0
−1.5
25
50
75
100
Number of senders
(a) Buffer size 5x BDP.
0
Normalized objective function
−1
Protocol
Cubic
Cubic−over−sfqCoDel
Kite
−2
Omniscient
RemyCC (1−100 senders)
RemyCC (1−2 senders)
−3
−4
25
50
75
100
Number of senders
(b) No packet drops.
Figure 3-3: Performance of Kite over a range of multiplexing.
29
scenarios, it would take weeks for the current optimizer to create such a protocol even
on a many-core server.
The discussion in this chapter highlights one additional benefit of an automated
protocol-synthesis tool: it is free of many biases and preconceptions that we have
about network congestion control, and can give us insight into different approaches
that might work better than what we could otherwise design. Even if interpretable
protocol synthesis is a distant future, we might be able to use the output of tools like
Remy to help inform and accelerate our engineering efforts.
30
Chapter 4
Toward automated verification of
congestion control
When a new congestion-control protocol is proposed, a primary concern from researchers and engineers is whether the protocol has failure modes that could lead
to catastrophic collapse in the Internet (cf. [19]). However, these failure modes are
difficult to predict and may be discovered only after deployment, when poor behavior
begins to manifest as deterioration in application performance and user experience.
One preventative measure is to perform general analyses of protocol behavior to find
failure modes or convince the community that the protocol is safe to use and will generally result in desirable behavior.
Traditional methods of analysis involve, for example, manually constructing a
continuous-time fluid model of a protocol, qualitatively demonstrating its correspondence with network simulations, and using techniques from control theory to establish
various desirable properties of the protocol [16, 3, 2]. While these analyses are useful for making statements about aggregate, average flow behavior, they require expert
knowledge to construct and are rarely helpful for comparing new protocols side-byside. Moreover, for complex protocols such as those generated by Remy [28], a fluid
31
model analysis is likely inaccessible even to an expert.
This chapter describes preliminary work toward an automated verification system
for congestion-control protocols.
4.1
Approach
To evaluate the safety of a protocol, we must have tools for reasoning about its longterm behavior. Continuous-time, continuous-state systems might be amenable to controltheoretic analysis, but at the finest granularity, the evolution and state of a network
contain both discrete and continuous elements. While fluid model analysis might predict favorable, stable equilibria (e.g. [16]), finer-grained simulation can reveal chaotic
behavior (for example, [26] describes divergence in TCP congestion window evolution
with small perturbations to initial conditions).
Here we explore the extreme of fine-grained safety analysis: using network simulations to directly verify properties of congestion-control protocols. We identify the
network state variables required to fully determine the future evolution of the network
state, and search for cyclic behavior in this state as we simulate the network forward.
If the evolution of the network state converges to a cycle, we can evaluate the senders’
objective functions over the course of that cycle in order to make statements about
the long-term value of the objective function, in addition to making statements similar to those made in traditional fluid-model analyses (e.g., [2]) about buffer sizes and
fairness. If we observe that the network enters multiple different cycles as a result of
perturbations, we can reason about the worst- and best-case performance of the protocol (under the simulated conditions) by evaluating these statistics over all observed
cycles.
32
4.1.1
Cycle detection
To find cycles in the network state, we simulate the network in an event-driven simulator and use Brent’s cycle-detection algorithm [5], polling the network state only on
network element events (e.g., a sender sending a packet, or a queue draining a packet).
We truncate continuous state variables to a precision of eight decimal places.
Brent’s algorithm (Algorithm 2) is a modification of Floyd’s cycle-detection algorithm [7]. Floyd’s algorithm uses two pointers to find a cycle in a linked list, by running one “slow” pointer through the list one node at a time, and another “fast” pointer
through the list two nodes at a time. If the pointers are ever equal, there is a cycle in
the list. In the context of a network simulation, we can run two simulations in parallel: one simulation one network event at a time, and a second simulation two network
events at a time; if the network states in these two simulations are ever the same, then
we have found a cycle in the evolution of the network.
Brent’s algorithm is more efficient than Floyd’s algorithm, as it runs the fast network
forward by powers of two rather than multiples of two, and simultaneously calculates
the number of network events in the cycle. Therefore, once a cycle has been detected,
we can easily find the time required for the network state to converge to this cycle by
once again running two simulations, one of which is exactly one cycle-length ahead
of the other. When the states of the two simulations are equal, the lagging simulation
is at the beginning of the first occurrence of the cycle. We can then run this lagging
simulation forward one cycle-length to calculate statistics, such as the average utility,
over the course of the cycle.
4.1.2
Network state
We use the same tools to evaluate RemyCC protocols as well as a simple TCP protocol
using additive increase/multiplicative decrease (AIMD) congestion window rules. This
33
Algorithm 2 Brent’s cycle-detection algorithm
Input: Starting network configuration
. Phase 1: detect the existence of a cycle
initialize fast_network to starting configuration
while simulated_time < time_limit do
initialize slow_network to current configuration of fast_network
steps_taken = 0
step_limit = 1
cycle_found = false
while steps_taken < step_limit do
run fast_network until network event
steps_taken++
if state of slow_network == state of fast_network then
cycle_found = true
break
end if
end while
if cycle_found then
break
end if
steps_taken = 0
step_limit *= 2
end while
. Phase 2: find the beginning of the cycle
re-initialize fast_network to starting configuration
re-initialize slow_network to starting configuration
for steps_taken iterations do
run fast_network until network event
end for
while state of slow_network != state of fast_network do
run fast_network until network event
run slow_network until network event
end while
. The “slow network” is now at the start of the cycle.
Output: Beginning of cycle
34
requires minimal annotation in the form of the specific state variables to maintain for
each sender.
For a single RemyCC sender, we maintain the following state variables:
• The RemyCC memory:
– EWMA (with a weight of 1/8) of interarrival times between acknowledgements
– EWMA (with a weight of 1/256) of interarrival times between acknowledgements
– EWMA of time between sender timestamps in the acknowledgements
– Ratio between the most recent RTT and the minimum RTT
• Current window size
• Time since last ACK received
For an AIMD sender, we maintain the following state variables:
• Current window size
• Number of packets remaining until window is filled
• Time since the last time a packet loss was detected
For the remainder of the network, we maintain the following state variables:
• State of each sender
• Current queue size
• Source ID of packet at the front of the queue
• Time until next event for each network element: senders, link, and receiver
35
4.2
4.2.1
Single sender
Sensitivity to initial conditions
Using the cycle-based technique described in the previous section, we can examine
various protocols’ behavior in steady state with a single sender in the network. In
particular, we study a RemyCC trained for a two-fold range of link speeds and another
trained for a thousand-fold range of link speeds, as described in Section 3.2. In this
experiment, we extensively simulate each RemyCC in a network with one sender, one
32 Mbits/s bottleneck link, and a round-trip time of 150 ms. We perturb the initial
conditions of the sender in two variables: the exponentially-weighted moving average
of ACK interarrival times that Remy maintains, and the size of the buffer at the time
the sender turns on. Figure 4-1 plots the value of the objective function of
log(throughput) − log(delay),
which gives equal weight to throughput and delay, for the cycles that this single sender
enters as the initial conditions are varied.
These plots highlight the fragility incurred from the piecewise nature of the protocol; slight variations in initial conditions can significantly impact the long-term utility
that the sender achieves. Figure 4-1a shows that a RemyCC trained for link speeds
between 22 and 44 Mbits/s achieves near 100% throughput for all initial conditions
tested. However, closer inspection (Figure 4-1b) reveals that these throughput values
are very sensitive to small variations in initial conditions; an increase of a single packet
in the initial buffer size can cause a throughput loss of almost 5%. A more robust
RemyCC might be designed by performing such evaluations during the optimization
procedure, and attempting to ensure that these regions of the initial conditions space
are continuous.
36
(a) Normalized throughput averaged over cycles reached by a RemyCC
trained for a two-fold range of link speeds [23]. Lighter values are closer to
full throughput.
(b) Normalized throughput averaged over cycles reached by a RemyCC
trained for a two-fold range of link speeds [23], with scale adjusted to highlight irregularities. The values are all close to 100% throughput, but small
perturbations to the initial conditions result in differing outcomes.
37
(c) Normalized throughput averaged over cycles reached by a RemyCC
trained for a thousand-fold range of link speeds [23]. Lighter values are
closer to full throughput. Initial buffer sizes below about 900 packets result in 60% or greater throughput; however, initial buffer sizes above 900
packets cause throughput to drop to below 50% and as low as 10%.
Figure 4-1: Throughput maps generated by sweeping a range of initial conditions for
a single sender running one of two Remy-generated protocols. An omniscient sender
would achieve 100% throughput (white).
38
A RemyCC trained for link speeds between 1 and 1000 Mbits/s exhibits more complex behavior (Figure 4-1c); the sender converges to a range of possible throughput
values. (The delay incurred was roughly the same for all initial conditions tested.) This
protocol achieves good throughput – above 60% – if the buffer size is below about 900
packets; above this value, throughput drops to as low as 10% of the link bandwidth.
This indicates that this RemyCC does have failure modes triggered by an increase in
buffer size, which should be investigated further before it is deployed in a real network.
4.2.2
Convergence time
We can additionally study the time required for the single-sender system to converge
to a cycle as a metric of the feasibility of this analysis. We sample 100 link speeds
distributed logarithmically over the range 1 Mbit/s to 1000 Mbits/s and measure the
time required for the state of a single-sender system to converge to a cycle. Figure 4-2
shows the convergence behavior for two RemyCCs optimized for breadth in link speed.
For a RemyCC trained for a two-fold range of link speeds (22-44 Mbits/s, Figure 4-2a),
the convergence time increases within the training range, where the protocol performs
better, indicating that cyclic behavior does not always correlate with good performance.
In fact, for link speeds between 22 and 23 Mbits/s, the system does not converge to a
cycle even after 5000 simulated seconds.
A thousand-fold RemyCC (trained for link speeds between 1 and 1000 Mbits/s,
Figure 4-2b) performs better; a single sender running this RemyCC converges to a cycle
within 16 seconds for the sampled link speeds. While this does not necessarily have
direct implications for performance, it does mean that this cycle-based analysis tool is
not suited to the RemyCC in Figure 4-2a, as it has regions even within the parameter
range it is trained for where it does not converge to a cycle in a tractably short duration.
39
5e+05
Time required to enter cycle (ms)
4e+05
3e+05
2e+05
1e+05
0e+00
1
10
100
Link speed (Mbits/s)
(a) Convergence times for a single sender running a RemyCC trained for
a two-fold range of link speeds (22-44 Mbits/s). The red line indicates a
link rate for which the system did not enter a cycle after 5000 simulated
seconds. Notably, the convergence times are lower outside the training
range, where the protocol performance is otherwise poorer.
16000
Time required to enter cycle (ms)
12000
8000
4000
1
10
100
Link speed (Mbits/s)
(b) Convergence times for a single sender running a RemyCC trained
for a thousand-fold range of link speeds (1-1000 Mbits/s).
Figure 4-2: Cycle convergence times for a one-sender system in a single-bottleneck
network with a 150 ms round-trip time.
40
4.3
Multiple senders
The presence of cyclic behavior allows us to reason about the safety of a protocol as
senders join and leave the network. We study the case in which a second sender could
join and leave the network at an arbitrary time after the first sender has turned on.
For these experiments, we assume zero initial conditions in all state variables, studying
noise only in the form of senders joining and leaving.
4.3.1
A sender joins the network
Consider a network in which a single sender s1 takes time t 1 to converge to a cycle
and time c1 to complete the cycle after it has converged. To reason about the safety
of a new sender s2 joining the network after s1 , we must consider the possibility that
s2 joins at an arbitrary time until t 1 + c1 . That is, we must simulate the second sender
joining at any time offset t on ∈ [0, t 1 + c1 ]. If the two-sender system then converges to
a cycle, we can apply the same tools as in the one-sender case to evaluate the safety of
that cycle.
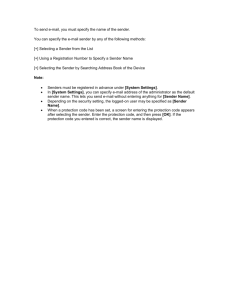
Figure 4-3 shows cycle convergence times for the case of a sender joining the network for two different protocols: a RemyCC trained for a thousand-fold range of link
speeds (1-1000 Mbits/s) and an AIMD sender. The test network consisted of a single
32 Mbits/s link with a 150 ms round-trip time. The network with AIMD senders was
limited to a maximum buffer size of 10 packets in order to have tractable convergence
times. The simulation was terminated if it did not reach a cycle within 5000 simulated
seconds.
The AIMD protocol has regions of t on offsets in which the two-sender system did
not enter a cycle within the allotted time. When the two-sender system did converge,
the RemyCC system converged much faster than the AIMD system, on the order of tens
of simulated seconds rather than hundreds. (The convergence time of a two-sender
41
Time required to enter cycle (ms)
30000
20000
10000
0
1000
2000
3000
Offset of second sender start (ms)
(a) Convergence times for a RemyCC trained for a
thousand-fold range of link speeds (1-1000 Mbits/s). No
limit was set on the buffer size.
Time required to enter cycle (ms)
2000000
1500000
1000000
500000
0e+00
1e+05
2e+05
3e+05
Offset of second sender start (ms)
(b) Convergence times for a simple AIMD sender. The
maximum buffer size was 10 packets to limit convergence
time. A red line indicates that the two-sender system did
not converge within 5000 simulated seconds.
Figure 4-3: Cycle convergence times for a two-sender system in a single-bottleneck
network with a 32 Mbits/s link and 150 ms round-trip time. The x-axis indicates the
time at which a second sender joins the network (starting at time 0 when the first
sender starts, until the first sender reaches a cycle). The y-axis indicates the amount
of time from when the second sender starts until the entire network state enters a
cycle. While a system of two RemyCCs converges to a cycle within under 35 seconds
regardless of when the second sender turns on, a system of AIMD senders can take up
to 2000 seconds to converge for the same network parameters.
42
AIMD system improves, predictably, in a scenario such as the one explored in [2] with
a 10 Gbits/s link and an RTT of several hundred microseconds.) The RemyCC, with
short cycles, is better suited to the analysis technique we describe; this suggests that it
would be beneficial to incorporate not only a requirement for cyclic behavior but also
a restriction on cycle length in future protocol-synthesis tools.
4.3.2
A sender leaves the network
When a sender leaves a network, we would like to ensure that the subsequent network
behavior is safe. Consider a two-sender network in which sender s1 turns on at time
0 and sender s2 turns on at some time offset t on ≥ 0. Define t 2 to be the time (after
t on ) required for this two-sender system to enter a cycle and c2 to be the time required
to complete the cycle after it has converged. The cycles of each sender need not be
interchangeable; that is, the state of s1 may cycle through different values than the
state of s2 (which joined the network some time after s1 ). Therefore, we must consider
the possibility of either sender turning off at an arbitrary time t o f f ∈ [t on , t on + t 2 + c2 ].
If we can demonstrate that the network enters a cycle for any combination of t on and
t o f f , we can then reason about the safety of a second sender entering and leaving
the network at arbitrary times, by examining the average value of a user-specified
objective function evaluated over each cycle. As in Section 4.3.1, if the network fails
to enter a cycle after an appropriately long simulated duration for some values of t on
and t o f f , this might indicate an unsafe mode of operation (or, conservatively, a mode of
operation which our current tool cannot reason about automatically, and merits further
investigation).
We have carried out this validation process for a two-sender system of RemyCCs
trained for a thousand-fold range of link speeds (1-1000 Mbits/s), in a network with
a single 32 Mbits/s bottleneck and 150 ms round-trip time. We simulate values of
t on and t o f f at integral numbers of milliseconds in the full range of t on ∈ [0, t 1 +
43
c1 ], t o f f ∈ [t on , t on + t 2 + c2 ], terminating any simulations running longer than 5000
simulated seconds. If the two-sender system does not reach any cycle, we terminate
the evaluation and do not simulate any t o f f values. (An alternate method might be to
fix the flow length of s2 to make the analysis more tractable and simulate all possible
values of t on for that flow, checking only whether the single-sender system enters a
cycle after s2 completes its flow. This would be agnostic of the two-sender system
entering a cycle.)
The full validation, of about 80 million simulations, took roughly 12 hours on an
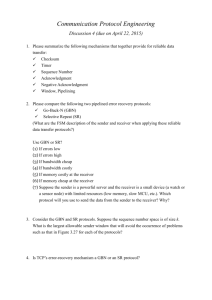
80-core server. We plot one such evaluation in Figure 4-4, for a network in which a
sender s2 turns on 100 milliseconds into the execution of sender s1 . We sample integral
durations (in milliseconds) for which s2 remains on before it turns off and leaves the
network. In Figure 4-4, we plot the time required for the s1 to re-enter a cycle after
s2 turns off. For this setup, the time required for s1 to reach a cycle increases almost
linearly with the sending duration of s2 . Note the erratic convergence behavior when
s2 is only on for a short period of time: this might indicate that it takes s1 longer to
return to a cycle if it encounters a momentary disruption, or simply that this particular
duration of s2 sending results in a network configuration from which s1 takes longer to
return to a cycle.
This analysis can be optimized somewhat if we can show that the two-sender system
enters one unique cycle regardless of the value of t on , as we then need only consider the
various trajectories taken during the time from t on until the network enters a cycle at
t on + t 2 , and there is only one cyclic trajectory to analyze from t on + t 2 until t on + t 2 + c2 .
RemyCCs appear not to have this property; for the RemyCC trained for a two-fold range
of link speeds, varying the t on value seems almost always to result in a unique cycle
for the subsequent two-sender system. Moreover, these cycles are qualitiatively quite
different, as evidenced by Figure 4-5. However, our simple AIMD model does have this
property: for any value of t on , the two-sender system will always enter the same cycle.
44
Convergence time for first sender (ms)
20000
15000
10000
5000
4000
8000
12000
16000
Duration for which second sender remains on (ms)
Figure 4-4: Time required for a single sender to return to a cycle after a second sender
has entered and left the network, in a network of RemyCCs trained for link speeds
between 1 and 1000 Mbits/s. The x-axis specifies the period of time for which the
second sender turns on before turning off again. The y-axis shows the number of
milliseconds required for the first sender to return to a cycle. The convergence time
for the first sender increases systematically the longer the second sender is on, except
when the second sender’s flow duration is short (under one second).
45
25
EWMA of ACK interarrival rate
20
Second sender offset
15
102.615
21.378
996.223
10
5
1000
2000
3000
4000
Sequence number of network event
Figure 4-5: Variation in cycle trajectories in one variable of the state of a two-sender
system of RemyCCs. The trajectories vary significantly and must be analyzed separately.
Since the AIMD protocol has much longer convergence and cycle times than RemyCCs
for comparable network parameters (link speed and round trip time), compressing the
cycles of the two-sender system into a single unique cycle might save a considerable
amount of time when evaluating the safety of one sender leaving the network.
4.4
Discussion
The results presented in this chapter are preliminary, but they demonstrate that – given
sufficient computational power – it is possible to automatically make statements about
the behavior of a black-box protocol. If we can demonstrate that a protocol enters cycles, a fine-grained analysis of its long-term behavior becomes tractable. It is therefore
beneficial to try to ensure that protocols do have such cyclic behavior in order to be
46
able to reason about their behavior, and a Remy-like protocol optimizer might be able
to enforce this as a requirement during the optimization.
While we take advantage of the presence of cycles in order to reason about the
long-term behavior of protocols, cyclic behavior is by no means required for a protocol
to be safe for deployment: indeed, the best-performing algorithms may have no cyclic
behavior at all, and there may be other ways of automatically evaluating the safety and
robustness of such algorithms.
A considerable amount of further work is required before tools such as the ones
presented in this chapter can be used to determine whether a protocol is truly “safe”
for use in the Internet. One important limitation of a simulation-based approach is that
the results do not immediately generalize to any network configurations outside of the
simulated one. It will be important to determine how to make such generalizations, and
– perhaps even more challenging – how to do so automatically, treating the protocol as
a black box.
However, even our preliminary results reveal some interesting properties of both
RemyCCs and simple AIMD senders. Particularly important is that RemyCCs do exhibit failure modes that can be made clear through extensive simulation. This does not
suggest that computer-synthesized protocols will all exhibit such behavior; in fact, it
suggests that, if developed further, analysis tools such as these can be useful for incorporation into the optimization procedure itself, to ensure that any protocol generated
by an automatic synthesizer is safe.
These kinds of safety guarantees, and formal verification tools, have been explored
in detail by the programming languages community, and we believe that such formal
guarantees will also be useful in engineering new network protocols, whether by hand
or by machine.
47
48
Chapter 5
Future work and conclusions
A number of avenues for future work remain.
The results in Chapter 3 suggest that there is potential to develop a protocolsynthesis tool that produces less complex algorithms, while retaining good performance. One way of building such a synthesizer would be to build a post-processing
step into the Remy optimizer, which regularizes the output of Remy into a simpler protocol. However, the current Remy optimizer takes days, or even weeks, to optimize a
good protocol. Finding a synthesis procedure with all three of these desirable properties – simple outputs, tractable runtime, and good performance – is a challenging, but
perhaps not impossible, task.
The two-sender evaluation method presented in Section 4.3 requires a number of
simulations that grows exponentially in the number of senders and will certainly not
scale to large numbers of senders. We may be able to optimize this by caching results
for trajectories of the state variables that recur in different simulations, as suggested in
Section 4.3.2, but this optimization is not possible for all protocols of interest; in fact,
we demonstrate that RemyCCs enter unique cycles for almost all simulated conditions
in our experiments with two senders. To automatically verify the safety of a protocol
when many flows are arriving and departing stochastically, it will be necessary to find
49
a verification strategy that is computationally tractable, which may not be the same
method presented in this thesis.
While we rely on the existence of cycles in the network state in order to perform the
analyses in Chapter 4, it is clear that many congestion-control protocols will not exhibit
such behavior – in fact, Section 4.3 identifies evaluation regions in which a RemyCC
does not enter a cycle at all, even under perfect, noise-free simulated conditions. To
develop a truly protocol-agnostic verification tool, we will need to develop methods
for reasoning about the long-term behavior of protocols that do not admit cycles in the
network state.
Stochastic flow arrivals and departures are only one form of noise in a network.
Section 4.2 shows that small perturbations in other variables of the network state can
lead to significant differences in performance (an observation true not only for RemyCCs but also, for example, TCP Tahoe [26]). Determining whether a cycle in the
network state is “stable” (in the sense that the network will robustly return to the cycle,
even under perturbations such as packet jitter) is useful in order to generalize our results to performance on real networks. Developing a formalism for making these kinds
of generalizations of simulated results is left to future work.
50
Bibliography
[1] M. Alizadeh, A. Greenberg, D. A. Maltz, J. Padhye, P. Patel, B. Prabhakar, S. Sengupta, and M. Sridharan. Data center tcp (dctcp). ACM SIGCOMM computer
communication review, 41(4):63–74, 2011.
[2] Mohammad Alizadeh, Adel Javanmard, and Balaji Prabhakar. Analysis of dctcp:
stability, convergence, and fairness. In Proceedings of the ACM SIGMETRICS joint
international conference on Measurement and modeling of computer systems, pages
73–84. ACM, 2011.
[3] H. Balakrishnan, N. Dukkipati, N. McKeown, and C. J. Tomlin. Stability analysis of
explicit congestion control protocols. IEEE Communications Letters, 11(10):823–
825, 2007.
[4] L. S. Brakmo and L. L. Peterson. Tcp vegas: End to end congestion avoidance on a
global internet. Selected Areas in Communications, IEEE Journal on, 13(8):1465–
1480, 1995.
[5] R.P. Brent. An improved monte carlo factorization algorithm. BIT Numerical
Mathematics, 20(2):176–184, 1980.
[6] W. Feng, K. Shin, D. Kandlur, and D. Saha. The BLUE Active Queue Management
Algorithms. IEEE/ACM Trans. on Networking, August 2002.
[7] R.W. Floyd. Nondeterministic algorithms. Journal of the ACM (JACM), 14(4):636–
644, 1967.
[8] S. Floyd. Tcp and explicit congestion notification. ACM SIGCOMM Computer
Communication Review, 24(5):8–23, 1994.
[9] S. Floyd and V. Jacobson. Random early detection gateways for congestion avoidance. Networking, IEEE/ACM Transactions on, 1(4):397–413, 1993.
[10] J. Gettys and K. Nichols. Bufferbloat: Dark buffers in the internet. Queue,
9(11):40, 2011.
[11] S. Ha, I. Rhee, and L. Xu. Cubic: a new tcp-friendly high-speed tcp variant. ACM
SIGOPS Operating Systems Review, 42(5):64–74, 2008.
51
[12] J.C. Hoe. Improving the start-up behavior of a congestion control scheme for tcp.
In ACM SIGCOMM Computer Communication Review, volume 26, pages 270–280.
ACM, 1996.
[13] C.V. Hollot, V. Misra, D. Towsley, and W. Gong. Analysis and design of controllers
for aqm routers supporting tcp flows. Automatic Control, IEEE Transactions on,
47(6):945–959, 2002.
[14] V. Jacobson. Congestion avoidance and control. In ACM SIGCOMM Computer
Communication Review, volume 18, pages 314–329. ACM, 1988.
[15] D. Katabi, M. Handley, and C. Rohrs. Congestion control for high bandwidthdelay product networks. In ACM SIGCOMM Computer Communication Review,
volume 32, pages 89–102. ACM, 2002.
[16] F. Kelly. Fairness and stability of end-to-end congestion control*. European journal
of control, 9(2):159–176, 2003.
[17] S. Kunniyur and R. Srikant. Analysis and Design of an Adaptive Virtual Queue
(AVQ) Algorithm for Active Queue Management. In SIGCOMM, 2001.
[18] Jeonghoon Mo, Richard J La, Venkat Anantharam, and Jean Walrand. Analysis
and comparison of tcp reno and vegas. In IEEE INFOCOM, volume 3, pages 1556–
1563. INSTITUTE OF ELECTRICAL ENGINEERS INC (IEEE), 1999.
[19] J. Nagle. Congestion control in IP/TCP internetworks. 1984.
[20] K. Nichols and V. Jacobson. Controlling queue delay. Communications of the ACM,
55(7):42–50, 2012.
[21] R. Pan, B. Prabhakar, and K. Psounis. CHOKe—A Stateless Active Queue Management Scheme for Approximating Fair Bandwidth Allocation. In INFOCOM,
2000.
[22] K. K. Ramakrishnan and R. Jain. A Binary Feedback Scheme for Congestion
Avoidance in Computer Networks. ACM Trans. on Comp. Sys., 8(2):158–181,
May 1990.
[23] A. Sivaraman, K. Winstein, P. Thaker, and H. Balakrishnan. An experimental study
of the learnability of congestion control. In ACM SIGCOMM, Chicago, August
2014.
[24] C.H. Tai, J. Zhu, and N. Dukkipati. Making Large Scale Deployment of RCP
Practical for Real Networks. In INFOCOM, 2008.
[25] K. Tan, J. Song, Q. Zhang, and M. Sridharan. A Compound TCP Approach for
High-speed and Long Distance Networks. In INFOCOM, 2006.
52
[26] A. Veres and M. Boda. The chaotic nature of tcp congestion control. In INFOCOM
2000. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies. Proceedings. IEEE, volume 3, pages 1715–1723. IEEE, 2000.
[27] D.X. Wei, C. Jin, S.H. Low, and S. Hegde. FAST TCP: Motivation, Architecture,
Algorithms, Performance. IEEE/ACM Trans. on Networking, 14(6):1246–1259,
2006.
[28] K. Winstein and H. Balakrishnan. TCP ex Machina: Computer-Generated Congestion Control. In ACM SIGCOMM, Hong Kong, August 2013.
[29] L. Xu, K. Harfoush, and I. Rhee. Binary Increase Congestion Control (BIC) for
Fast Long-Distance Networks. In INFOCOM, 2004.
53