Course roadmap MECH466: Automatic Control Lecture 18 Nyquist
advertisement

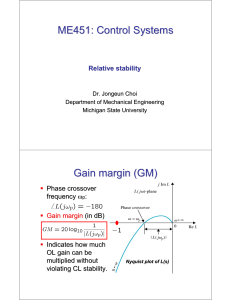
Course roadmap MECH466: Automatic Control Modeling Analysis Laplace transform Lecture 18 Nyquist stability criterion: Examples Relative stability Transfer function Models for systems • electrical • mechanical • electromechanical Dr. Ryozo Nagamune Department of Mechanical Engineering University of British Columbia Linearization Time response • Transient • Steady state Frequency response • Bode plot Stability • RouthRouth-Hurwitz • Nyquist Design Design specs Root locus Frequency domain PID & LeadLead-lag Design examples Matlab simulations & laboratories 2008/09 MECH466 : Automatic Control 1 Nyquist plot (review) Nyquist path Im 2008/09 Im 2 Nyquist stability criterion (review) Nyquist plot L(s) L(s) when s s MECH466 : Automatic Control C(s) C(s) moves on Nyquist path G(s) G(s) H(s) H(s) Re Re Z: # of CL poles in open RHP P: # of OL poles in open RHP (given) N: # of clockwise encirclement of -1 by Nyquist plot of L(s) L(s) (very large) 2008/09 MECH466 : Automatic Control 3 2008/09 MECH466 : Automatic Control 4 1 Nyquist criterion: A special case (review) Examples when P=0 Im Im Re IF P=0 (i.e., if L(s) L(s) has no pole in open RHP) CL stable We assume P=0 from now on! 2008/09 MECH466 : Automatic Control 5 Example of L(s) with an integrator When open loop poles lie on the imaginary Im axis, we modify Nyquist path, path, by detouring to the right of the poles. (very small) Ex: 2008/09 Re CL unstable MECH466 : Automatic Control 6 L(s) for modified Nyquist path For small |s|, Im s s Re (very small) When s moves as L(s) L(s) moves as Re L(s) L(s) (very large) Note: If L(s) L(s) has no open RHP pole, we are interested in (and draw) Nyquist plot ONLY around the critical point -1. 2008/09 MECH466 : Automatic Control 7 2008/09 MECH466 : Automatic Control 8 2 Bode plot of L(s) Example of L(s) with an integrator dB -20 15 10 5 -40 0 deg -5 -10 -15 -1 2008/09 MECH466 : Automatic Control 9 2008/09 -0.8 -0.6 -0.4 -0.2 MECH466 : Automatic Control 0 10 Bode plot of L(s) Example of L(s) with double integrator dB -40 5 -60 deg 0 -5 -5 2008/09 -4 -3 MECH466 : Automatic Control -2 -1 0 11 2008/09 MECH466 : Automatic Control 12 3 L(s) with a time-delay Bode plot of a time delay (review) 0.5 1 0.5 0 0 -0 . 5 -0.5 -1 -2 10 -1 10 -1 10 0 10 1 10 2 Huge phase lag! 0 -1.5 -2 0 0 0 -2 -4 0 0 0 -2.5 -3 -6 0 0 0 -2 10 -1 0 1 2 MECH466 : Automatic Control 13 -1 10 0 10 1 10 2 The phase lag causes instability of the closedclosed-loop system, and thus, the difficulty in control. 3 RouthRouth-Hurwitz is NOT applicable! 2008/09 10 2008/09 Announcements MECH466 : Automatic Control 14 Some remarks Lab 4 starts next week. See the schedule in Nyquist stability criterion gives not only absolute but also relative stability. stability. MECH466_LabSchedule_0809 (Mar 5).pdf Final exam Absolute stability: stability: Is the closedclosed-loop system stable or not? (Answer is yes or no.) Date & time: April 21 (Tue), 3:30pm3:30pm-6pm Relative stability: stability: How “much” much” is the closedclosed-loop Place: CHBE101 system stable? (Margin of safety) Policy change Relative stability is important because a mathematical model is never accurate. How to measure relative stability? • One letterletter-size cheat sheet (you can use both sides of the sheet) is allowed. • The cheat sheet must be written by hand by yourself! Use a “distance” distance” from the critical point -1. Gain margin (GM) & Phase margin (PM) 2008/09 MECH466 : Automatic Control 15 2008/09 MECH466 : Automatic Control 16 4 Gain margin (GM) Examples of GM Im Phase crossover frequency ωp: Gain margin (in dB) Im Re Re Indicates how much OL gain can be multiplied without violating CL stability. 2008/09 Nyquist plot of L(s) L(s) MECH466 : Automatic Control 17 2008/09 Reason why GM is inadequate Same gain margin, but different relative stability MECH466 : Automatic Control Phase margin (PM) Gain crossover frequency ωg: Phase margin Gain margin is often inadequate to indicate relative stability MECH466 : Automatic Control Nyquist plot of L(s) L(s) Indicates how much OL phase lag can be added without violating CL stability. Phase margin! 2008/09 18 19 2008/09 MECH466 : Automatic Control 20 5 An example Notes on Nyquist plot Advantages Nyquist plot can be used for study of closedclosed-loop stability, for open loop systems which is unstable and includes timetime-delay. Disadvantage Controller design on Nyquist plot is difficult. (Controller design on Bode plot is much simpler.) We translate GM and PM defined in Nyquist plot into those in Bode plot! 2008/09 MECH466 : Automatic Control 21 2008/09 Relative stability on Bode plot MECH466 : Automatic Control 22 Notes on Bode plot Advantages Without computer, Bode plot can be sketched easily. ωg GM, PM, crossover frequencies are easily determined on Bode plot. GM Controller design on Bode plot is simple. (Next week) Disadvantage ωp If OL system is unstable, we cannot use Bode plot for closedclosed-loop stability analysis. PM 2008/09 MECH466 : Automatic Control 23 2008/09 MECH466 : Automatic Control 24 6 An example Relative stability with time delay 20 0 GM GM 0 -50 -20 -1 10 -100 10 0 ωg 1 10 ωp 2 0 10 3 10 10 -90 Time delay reduces relative stability! PM -180 PM -180 -270 10 2008/09 -1 0 10 0 1 10 2 10 3 10 Delay time 10 MECH466 : Automatic Control 25 2008/09 Unstable closed-loop case MECH466 : Automatic Control 26 Summary and exercises Relative stability: Closeness of Nyquist plot to the critical point -1 GM Gain margin, phase crossover frequency Phase margin, gain crossover frequency ωp ωg Relative stability on Bode plot We normally emphasize PM in controller design. Exercises Read Sections 10.6 & 10.7. Obtain GM, PM for openopen-loop Bode plots in Figures P10.7, P10.8, P10.10 (pages 593593-595). PM 2008/09 MECH466 : Automatic Control 27 2008/09 MECH466 : Automatic Control 28 7